基于OpenCV的机场跑道外来物报警系统设计
2014-08-08曹启武
曹启武,陈 津
(中国民航大学航空工程学院 天津300300)
创新技术
基于OpenCV的机场跑道外来物报警系统设计
曹启武,陈 津
(中国民航大学航空工程学院 天津300300)
基于视频技术,采用计算机视觉库 OpenCV开发了机场跑道外来物(FOD)报警系统。其中,目标识别模块采用混合高斯方法建模,并将背景法和帧差法结合实现静止目标和运动目标的检测;目标跟踪模块采用Camshift提高了跟踪的可靠性;报警模块针对目标的实际情况设定标准,超过标准则报警。
OpenCV FOD 目标识别 目标跟踪
0 引 言
机场跑道的外来物会对飞行安全造成很大隐患,中国民航平均每年会发生 4,000多起外来物损伤轮胎的事件,对飞行安全造成巨大影响。跑道FOD(Foreign Object Debris)报警系统的研究是从法国协和号飞机意外失事开始的,目前国际上先进的FOD监测系统[1]主要采用毫米雷达波和图像处理技术,而国内还没有较为成熟的机场跑道外来物监测系统,所以开发实时可靠的跑道监测系统是十分必要的。各国跑道监测装置如图1所示。

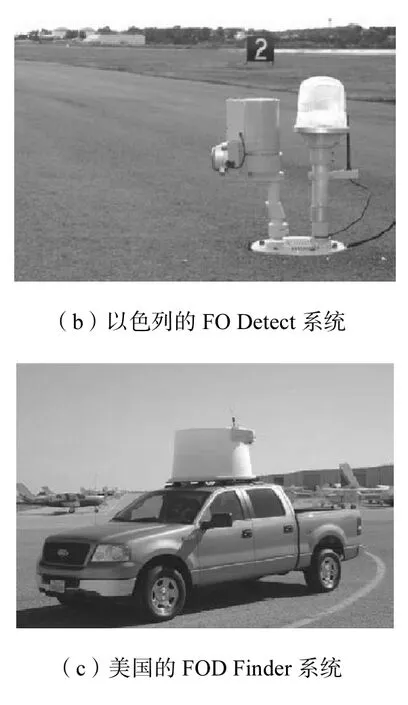

图1 国外机场跑道异物检测系统Fig.1 FOD detection systems in foreign countries
1 报警系统的设计方案
硬件方面,机场跑道受到净空限制,摄像头不能装在影响飞行安全的区域,所以设置相对远离跑道,具有一定高度的塔架用来安装摄像头。为了装载方便,将跑道 FOD报警系统搭载在机场已有的网络系统工作,其网络拓扑图如图 2所示。由塔架上的摄像机实时获取机场跑道视频,通过路由器将视频传入主网络;视频处理计算机通过对视频帧进行处理,实现FOD目标的识别和跟踪;FOD信息被确认后,由监控系统显示报警信息,并将 FOD信息储存在存储管理器中。

图2 跑道FOD报警系统网络拓扑图Fig.2 Topological graph of the network of runway FOD alarm system
2 目标识别模块
外来物目标的监测是报警系统的第一步,跑道外来物存在静止目标和运动目标,以往通常把两种目标分开研究,但两种外来物对机场安全的危害同等重要,所以系统需要对两种目标具有良好的监测结果。视频处理技术中传统算法包括帧间差分法、背景差分法和光流法等。[2]帧差法适合对运动目标检测,但无法检测出静止目标;背景差分法最大的缺陷就是对光线和背景变化敏感。两种算法结合效果明显,但是目标完整性不高,这就需要使用更实用的背景估计模型。
混合高斯模型是基于每个像素点的灰度概率分布,一方面,它适用于有微小变化运动的复杂背景场合,如树叶影子的变化、雨雪天气等;另一方面,它结合背景自适应更新算法完成背景变化较大时的实时更新。为防止在进行背景更新时把精致目标化为背景,设定一定的阈值,当匹配高斯模型时,大于阈值视为出现目标,存在目标的帧不进行更新。本文在混合高斯建模法[3]的基础上,提出背景差分法与帧间差分法的改进算法,综合两种算法的优点,获得比较完整的目标图像,使其很好地适用在跑道外来物报警系统中。目标识别流程图如图3所示。

图3 目标识别模块流程Fig.3 Flow of the target recognition module
2.1 混合高斯模型
混合高斯模型关注每个像素点的概率分布情况,它一般由 3~5个高斯模型组成,把获得的当前帧图像作为输入与混合高斯模型匹配,匹配成功就是背景的一部分,否则便是前景目标点。然后通过调整均值和方差等高斯模型重要参数,来获得最高概率的背景图像。
OpenCV中提供高斯混合模型函数程序的是cvaux中的cvbgfg_gaussmix.cpp文件。模型相关的参数被存在 CvGaussBGModel类中,本文通过修改该类中一些函数程序的参数[4]完成混合高斯模型的建模。背景建模过程中,采用第一帧图像作为初始化对象,由于初始化的高斯模型并不准确,所以对第一帧图像取较大的方差和较小的权值。随着高斯模型的逐步建立,变化范围缩小,及时更新参数值,得到最可靠的混合高斯模型。设置大的方差,有助于把尽可能多的像素包含到一个模型里面,从而得到更有效的简化模型。[5]
2.2 不包含目标信息的自适应更新
每次获取当前帧需要判断其是否与高斯模型匹配,匹配完成时将背景模型进行更新:

其中k表示混合高斯模型的模式,j表示时间,β表示更新系数,若β=0则表示不更新。β=0有两种情况,一是与当前高斯模型不匹配,二是当前帧被判定含有前景目标,此时对所有的模式,β的值都是0。
2.3 背景差分和帧差法结合
由于帧差法基本不受环境干扰,能得到目标的基本信息,将两种方法得到的目标图像对比分析就能得到更加完整的目标。得到目标之后,对得到的图像中值滤波,滤去可能的噪声,然后进行形态学处理,得到更加完整平滑的图像。
酒店管理信息系统 (Hotel Management Information System,简称 HMS)是以酒店员工为主导,利用现代信息技术支持酒店业企业经营、管理和决策的人机系统。其作为现代酒店管理的一个辅助系统,具有开放性、层次性。同时酒店信息管理系统呈现出专业化、集团化、集成化、标准化发展趋势[7]。
3 目标跟踪模块

图4 Camshift算法流程图Fig.4 Process of Camshift algorithm
跑道 FOD在识别之后,静止的物体只需要进行定位和清理,而运动的物体由于位置不定,需要进行实时跟踪。实现跟踪有很多方法:Karman跟踪、Meanshift跟踪、Camshift跟踪。比较几种跟踪方法的稳定性和准确性,选取 Camshift方法,一方面它是非参数的算法,解决了 Karman算法的线性局限性,另一方面它对图像进行空间处理,克服了 Meanshift局部收敛造成的背景干扰和遮挡问题。将当前帧目标的位置信息投影到下一帧背景图像区域里,通过确定图像中的运动目标位置,重新设置搜索窗口,重复该步骤就可以实现目标的动态跟踪,[6]其算法流程如图4所示。
由于 Camshift算法下一帧的搜索范围被限制在上一帧目标的附近区域,所以会为搜索节省大量的时间,提高算法的实时性。目标在运动过程中颜色特征基本不变,而此算法主要对目标的颜色特征感兴趣,所以算法还有良好的鲁棒性。Camshift实现跟踪的主要代码如下:
frame=cvQueryFrame(capture);//当前图像转图片
CV_CHAIN_APPROX_SIMPLE,cvPoint(0,0));//找轮廓
cvCvtColor(target,target_hsv,CV_BGR2HSV);//将图片由RGB转化为HSV
cvSplit(target_hsv,target_hue,NULL,NULL,NULL);//得到 H 分量
cvCalcBackProject(&rawImage,result,hist);//计算背景投影
cvCamShift(backproject,track_window,cvTerm Criteria(CV_TERMCRIT_EPS1CV_TERMCRIT_ITER,10,1),&track_comp,&track_box);//算法跟踪
4 报警模块

1)//表示第一帧和第二帧的目标都大于 3,000个像数点

依次类推当第五帧的目标也大于 3,000个像素点:printf("warning!!!/n")状态返回0
外来物入侵跑道发出报警后,工作人员需要确定报警信息是否真实,并立即采取相关措施,清除外来物。
5 测试结果分析
本文以VS2010平台为基础,借助OpenCV视觉库,针对机场跑道的实际情况,以公路实景为背景进行取景实地测试,采用的硬件参数如表1所示。

表1 测试设备参数表Tab.1 List of device parameters

图5 系统测试结果图Fig.5 System test results

图6 背景差分法和帧间差分法目标识别结果Fig.6 Recognition results of background differencing and inter-frame difference methods
系统测试结果如图5所示,在VS2010平台上生成显示界面,4部分图像分别为视频当前帧图像、目标识别图像、目标跟踪图像、报警信息图像。其中目标识别界面得到两辆汽车识别的二值化信息,二值化图像显示的前景目标清晰可靠、空洞少。目标跟踪界面上,红框表示跟踪框,它不仅能满足跟踪要求的实时性,还可以进行多目标的跟踪。
同时,我们也利用背景差分法和帧差法进行了实验(见图 6),背景差分法和帧间差分法都能确认前景目标的信息,但背景差分法轮廓信息较为缺乏,目标不够完整;帧间差分法汽车轮廓清晰,但是空洞较多。本文算法得到的目标识别结果明显优于这两种算法。
6 结 语
提出了基于OpenCV视觉库的机场跑道FOD报警系统的设计方法,依托 VS2010平台,利用OpenCV函数库,结合混合高斯模型法,克服了背景差分法和帧间差分法的缺点。通过实验结果的分析,该软件系统能准确得到目标,实现实时跟踪和报警,为跑道FOD报警系统的深入研究和工程实现奠定了基础,具有一定的实际意义。
[1] 李煜,肖刚. 机场跑道异物检测系统设计与研究[J].激光与红外,2011(8):5-7.
[2] 陈吉庐. 基于 OpenCV的红外运动目标检测与跟踪算法研究及实现[D]. 南京:南京理工大学,2001.
[3] 姚会,苏松志,王丽,等. 基于改进的混合高斯模型的运动目标检测方法[J]. 厦门大学学报:自然科学版,2008(47):505-510.
[4] 王丽娟. 基于 OpenCV 与混合高斯建模的运动目标检测[J]. 电子测试,2009,9(9):86-90.
[5] Daniel Gutchess,Miroslav Trajkovic,Eric Cohensolal,et al. A background model initialization algorithm of video surveillance[A],In:Proceedings of IEEE International Conference on Computer Vision[C]. Vancouverr,BC,2001:733-740.
[6] 邹铁军,张书伟,蒋杰,等. 基于 OpenCV的运动目标检测与跟踪系统软件设计[J]. 智能计算机与应用,2012(3):1-5.
Design of Runway FOD Alarm System Based on OpenCV
CAO Qiwu,CHEN Jin
(College of Aeronautical Engineering,CAUC,Tianjin 300300,China)
Based on video technology,a FOD(Foreign Object Debris)alarm system for airfield runway was designed with the OpenCV function library. In the system,moudling of the target identification was made by Gauss Mixture model and through the combination of background difference method and frame difference method,both static and dynamic objects could be detected;a target tracking module was realized through categorization of Camshift in the OpenCV to enhance its reliability;standards were set up based on specific situation for the alarming module which will be activated when the limit is breached.
OpenCV;FOD;target recognition;target tracking
TN954+.2
A
1006-8945(2014)07-0003-04
中央高校基本科研业务费资助项目(3122013SY43)。
2014-06-07