AFS系统主从ECU的LIN通讯优化研究❋
2014-08-07王成志李建成范多旺
王成志,李建成,张 锐,彭 毅,范多旺
(兰州交通大学光电技术与智能控制教育部重点实验室,兰州730070)
AFS系统主从ECU的LIN通讯优化研究❋
王成志,李建成,张 锐,彭 毅,范多旺
(兰州交通大学光电技术与智能控制教育部重点实验室,兰州730070)
智能化自适应前照灯系统(AFS)是汽车安全性和舒适性的重要指标之一。目前汽车AFS主要是利用单LIN总线通讯实现主ECU与从ECU的数据传输。该系统基本实现了前照灯的智能控制,但存在发送帧冗余、多从ECU之间数据干扰、实时响应慢等问题。在分析现有AFS系统的基础上,提出利用双LIN总线实现主从ECU通信的设计方案。实验证明,双LIN总线结构能够有效减少信号之间的干扰,通信过程稳定性高,实时调光效果好。
智能化自适应前照灯系统;LIN通讯;单片机
1 引 言
智能化自适应前照灯照明系统AFS(advanced front-lighting system)是一个由传感器组、传输通路、电控单元和执行机构组成的系统[1]。AFS从多种传感元件和其它控制系统取得相应的车辆行驶信息,经过处理器的分析和处理,控制执行机构,从而实现不同行使路况(如高速公路、城市道路、颠簸路面等)、不同环境模式(如夜间、白天、下雨、下雪)、不同行驶情况(如拐弯、刹车等)下的前照灯自动调整,以提供最好的照明效果,增加驾驶的安全性和舒适性。
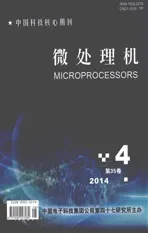
目前,汽车AFS系统主要是利用单LIN总线实现主ECU与从ECU的数据传输,以实现前照灯步进电机的控制[2-3]。其主节点发送帧头,从节点根据发送的帧头类型决定应该由哪个从节点做出响应,如图1(a)所示。这种系统基本可以实现模块之间数据的传输,但存在如下问题[4-5]:①发送帧冗余;②同一信号发送到两从ECU之间造成从ECU之间的数据干扰;③实时响应执行效果较差。为了解决以上问题,提出左右从ECU采用不同的LIN总线进行通讯的优化方案,如图1(b)所示。
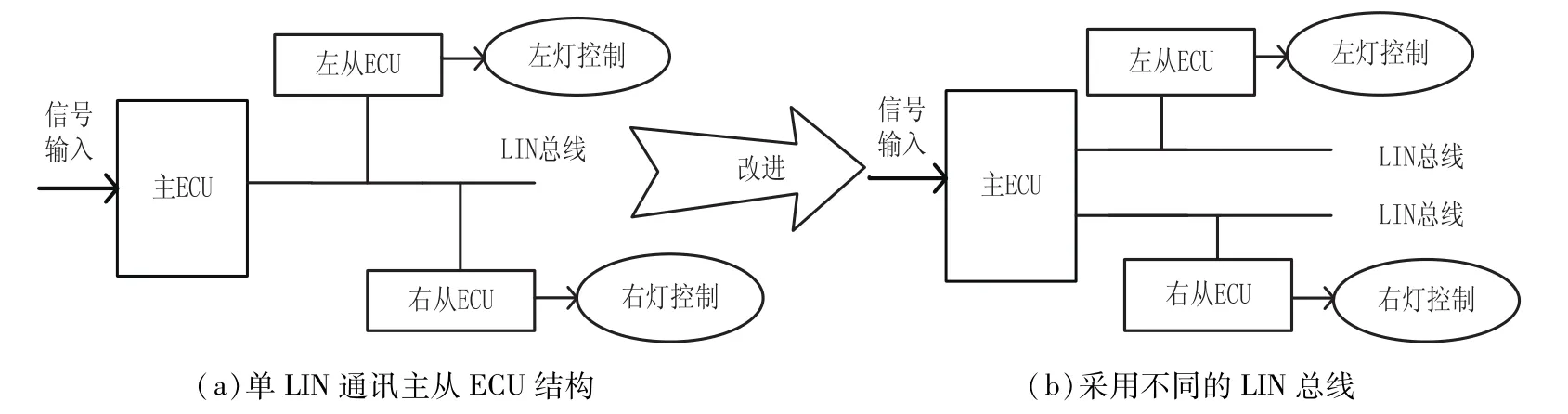
图1 主从ECU结构示意图
2 AFS硬件设计
AFS控制单元包括主ECU和左、右从ECU。主ECU包括:主控制器、CAN控制器、LIN控制器、LIN收发器;从ECU包括:LIN收发器、电机驱动模块、霍尔电路及电源管理模块。电控单元ECU通过CAN总线从方向盘角度、车速、车身高度位移等传感器分别取得转向轮旋转角度、车体速度和车身倾斜度等的精确车辆行驶信息,经过控制器运算和处理,并获得恰当的前照灯控制值,最后通过LIN总线传输到左右车灯的从ECU控制模块。从ECU根据接收到的LIN信号,通过驱动电路驱动外部步进电机进行相应的动作。AFS系统硬件框图如图2所示。

图2 AFS系统硬件框图
2.1 控制器设计
MCU选用infineon公司的单片机XC2234L[6]。该单片机是汽车电子专用16/32位单片机,具有MultiCAN控制器单元,支持异步数据帧的发送和接收,同时具有四路串行接口通道和窗口看门狗的程序检错模块。
2.2 LIN信号收发器设计
LIN信号收发器选用TI公司的SN65HVDA100-Q1收发器。SN65HVDA100-Q1为汽车专用器件,是LIN通讯的物理接口,并且符合LIN2.0规范。该收发器具有最高20kbps的传送功能和高强度的信号接收能力。SN65HVDA100-Q1与单片机的连接图如图3所示。
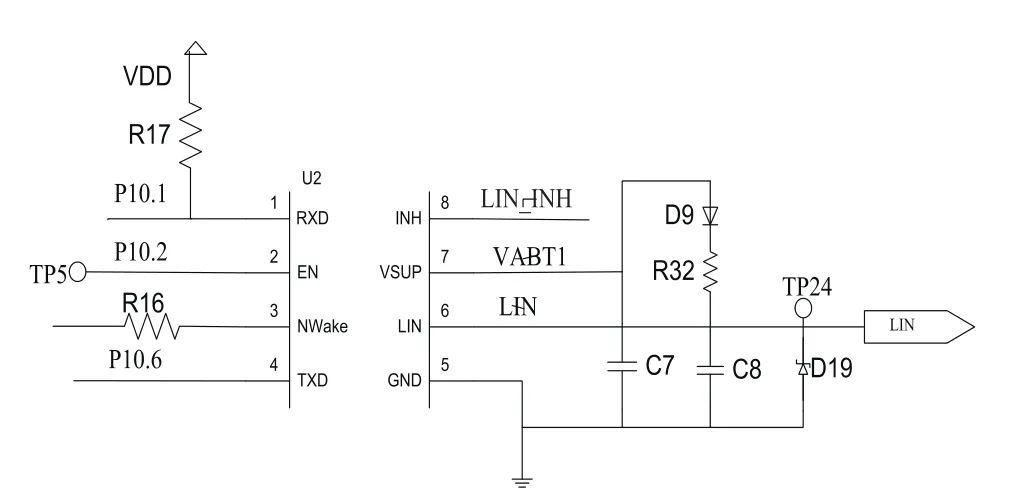
图3 SN65HVDA100-Q1与单片机的连接图
3 LIN总线通讯
LIN总线是专门为汽车开发的一种低成本串行网络,是对现有汽车多元化网络公文包的一个补充。LIN通讯基于SCI(UART)数据格式,采用单主控制器/多从设备的模式,仅使用一根12V信号总线和一个无固定时间基准的节点同步时钟线,并且从机节点不需要石英或陶瓷谐振器就能实现自同步。LIN协议作为一个成本低、距离短、速度慢的串行通讯网络协议,能够连接车辆内各种子系统,增强子系统之间的通讯效率,提高可靠性。同时,在带宽要求不高、功能简单、性能指标较低的情况下,使用更低成本的解决方案补充类似CAN的高端汽车总线的不足[7]。该LIN通讯遵循LIN2.0规范。
3.1 帧信号传输
LIN总线上进行传送的实体是帧信号,帧是由一个帧头和一个帧响应组成。帧头包括同步间隔场、同步场和标识符场。间隔场标识一个新帧的起始点,标识符场在间隔场和同步场之后,唯一决定了帧的目的。数据场和校验和场属于帧响应部分,用于输送该目的。每个预定的帧总会在总线上分配一个帧槽,帧槽的时间必须足够长,以便在最糟情况下也能装载帧。帧结构如图4所示。
3.2 LIN机群任务
LIN机群由一个主机任务和几个从机任务组成,主节点包括主机任务和从机任务,而从节点只包含从机任务。在帧传输过程中,所有帧头都由主机任务发起,如果从机任务对标识符有关的数据感兴趣,那么它就可以接收这个响应。图 5(a)和图5(b)所示分别为主机任务状态和从机任务状态,主机任务发送帧头,在接收完间隔和同步场之后,从机任务继续接收标识符场,并据此判断接收主机发来的数据或者回发主机所需要的帧数据,并使用传送过来的信号数据。该帧的传送过程使得LIN通讯具有以下特点:节点可被添加到LIN机群上,而不改变其它从节点的软件硬件;信息的内容由标识符定义;多个节点可同时接收信息并共用单个帧。

图4 帧结构

图5 主/从机任务
3.3 进度表
进度表为LIN通讯中的一个重要概念。它具体规定了每个帧头的标识符号及帧与帧之间的间隔,如图6所示。一个主机程序中可以使用多个进度表,同时帧被分配了具体的入口点,一旦当前进度达到下一个目的入口点,新的进度将会被激活。
图6 进度表

在以上实例中,VL1代表进度表标识符,其在Schedule_tables中具有唯一性;VL1_CEM_Frm1、VL1_LSM_Frm1、VL1_CPM_Frm1、VL1_CPM_Frm2为帧标识符,其为Frames子集中定义的frame_name标识符中的一个;delay后的时间表示了两相邻帧之间的时间间隔。
4 双LIN总线传输的软件设计
系统程序采用TASKING_C166编译器,并利用infineon的DAVE[6]生成器生成MCU底层驱动代码。DAVE生成代码后在user code中添加用户程序,以实现全部功能,该程序以调用进度表的形式实现LIN通讯的全过程,共三个进度表,分别为进度表0、进度表1、进度表2。
4.1 程序流程图
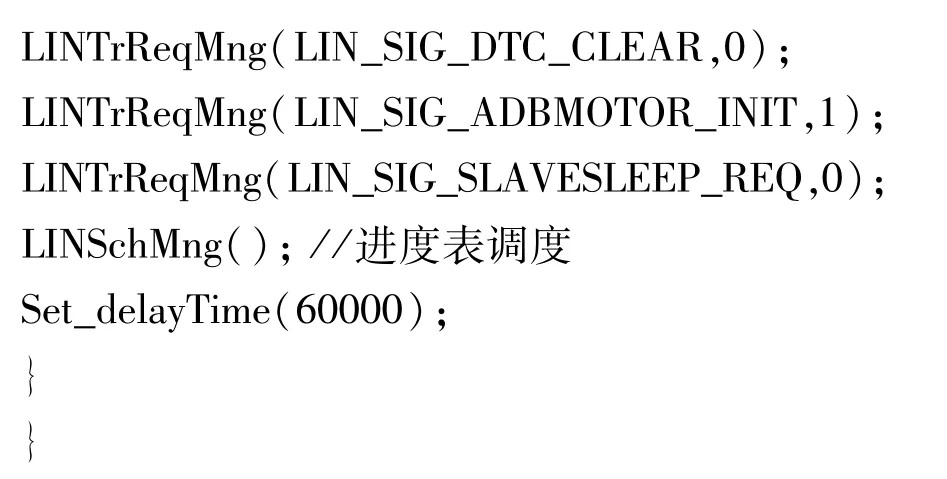
系统首先进行LIN的底层初始化,调用进度表0查询从节点有无故障,如有,根据故障信息调用进度表0进行相应的修复;确认从节点无故障后,调用进度表2(配置帧的高位为1)进行马达初始化,还要通过再次调用进度表0查询初始化的完成情况;初始化后,调用进度表2(配置帧的高位为0)进行正确位置配置。该过程分配80ms的定时时间,以80ms为周期无限循环,从而发送最新的更新数据,实现对环境改变的实时调整。LIN通讯流程示意图如图7所示。
4.2 程序代码
进度表0包含34、35状态查询帧的发送,分别对应左右从节点,即对应两路LIN通讯。进度表1中含有20命令帧,包括对从节点故障清除请求位域和从节点休眠请求位域。进度表2含有位置配置帧30,帧以16位数据为划分单位,分别对应DHL位置、左AFL位置、右AFL位置的数据。部分代码如下:
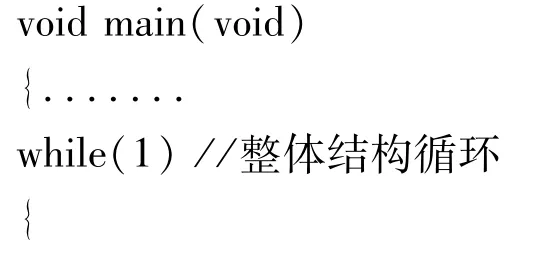
其中,LINSchMng()函数即实现了主机根据进度表发送帧的过程。
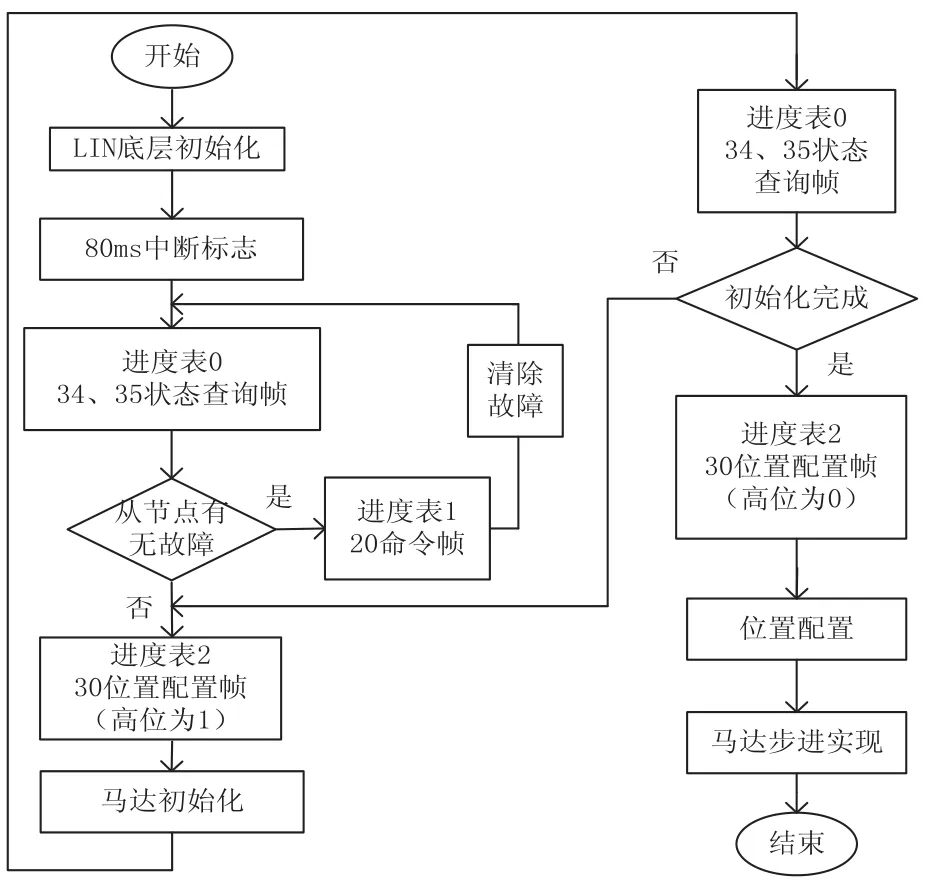
图7 LIN通讯流程示意图
5 软件仿真结果与分析
MASTERECU和SLAVE ECU通过CANoe[8]工具软件监控二者之间的LIN通讯,由CAN仿真LIN的主节点,通过trace窗口观察到的通讯如图8所示。主ECU与两路LIN通讯对应的从ECU很好的实现了数据同步传输,解决了原系统中发送帧冗余及数据干扰问题。整个通讯过程中,帧数据传送稳定,没有造成掉帧错帧等错误,左右LIN的通信时差为微秒级,实时同步调光效果好。
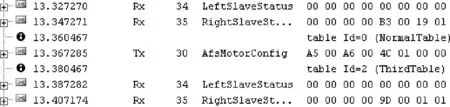
图8 系统仿真图
6 结束语
单LIN总线是目前应用最为广泛的结构,在此基础上,提出了相应的优化方案,为实现汽车前照灯的智能控制提供了新思路。实验表明,双LIN总线结构能够有效减少多从ECU数据信号之间的干扰,同时,整个主从通讯过程稳定性能高,实时调光效果好,无丢帧失帧现象,基本达到了设计要求。本课题的未来研究重点是实现双LIN总线在汽车智能驾驶中的实践应用。
[1]崔惠中,关志伟.智能前照灯系统(AFS)研究现状综述[J].天津工程师范学院学报,2008(3):47-54.
[2]林国余,王东,姚平.基于LIN总线的主从式自适应前照灯控制系统[J].计算机测量与控制,2011(9):2142-2146.
[3]郑荣良,胡永亮,俞方磊.基于CAN/LIN混合网络的智能汽车前照灯系统(AFS)的设计[J].拖拉机与农用运输车,2009(10):112-115.
[4]佟为明,孙凡金,赵志衡.LIN总线技术[J].低压电器,2004(2):35-38.
[5]魏冰,刘少鹏.基于LIN总线的汽车HID前照灯自动调光系统[J].电子设计应用,2007(1):98-100.
[6]Infineon Technologies AG.16/32-Bit Architecture(XC2234L)User's Manual[Z].Munich,Germany:V1.3,2010(04).
[7]郑荣良,袁鹏平.局域互联网络LIN总线在车辆上的应用[J].江苏大学学报,2004(3):129-132.
[8]闫旭琴,王知学,李建新.CANoe软件在车载诊断中的应用[J].科技传播,2009(12):88-90.
Study on LIN Communication Optim izing of the Master-Slave ECU of AFS System
WANG Cheng-zhi,LIJian-cheng,ZHANG Rui,PENG Yi,FAN Duo-wang
(Key Laboratory of Opto-electronic Technology and Intelligent Control(Ministry of Education),Lanzhou Jiaotong University,Lanzhou 730070,China)
The advanced front-lighting system(AFS)is important for safety and comfort of the automobile.Currently automotive AFSmainly uses single LIN to conduct data communication between the master ECU and slave ECU.The system basically realizes intelligent control for the headlamp,but there are some problems such as the redundant transmission frames,the interference of data between several slave ECUs and slow real-time response.The new system uses dual LIN bus to realize the communication between themaster ECU and slave ECU by the analysis of the existing AFSsystem.The experimental results show that the dual LIN bus system can reduce the interference of data between several slave ECUs effectively,the communication process of the system is stabile and the real-time dimming response is effective.
AFS;LIN communication;Single-Chip Microcomputer
10.3969/j.issn.1002-2279.2014.04.017
TN919
:A
:1002-2279(2014)04-0052-04
国家高科技研究发展计划(863计划)课题资助(2012AA040207)
王成志(1988-),男,山东人,硕士研究生,主研方向:铁路交通信息工程及控制。
2013-12-23