基于手机内置传感器的无外源信号室内定位方案
2014-08-05张砚炳沈嘉琪岳岱安
张砚炳,沈嘉琪,岳岱安,唐 曦,3
(1.华东师范大学地理系,上海 200241;2.华东师范大学软件学院,上海 200062;3.华东师范大学地理信息科学教育部重点实验室,上海 200241)
基于手机内置传感器的无外源信号室内定位方案
张砚炳1,沈嘉琪1,岳岱安2,唐 曦1,3
(1.华东师范大学地理系,上海 200241;2.华东师范大学软件学院,上海 200062;3.华东师范大学地理信息科学教育部重点实验室,上海 200241)
一、引 言
室内定位导航需求日渐凸显,但在室内环境下,由于建筑的复杂结构和遮蔽性,GPS等外源信号易受干扰,传统GPS定位方式无法完全实现室内定位[1-2]。而后续研究者所提出的基于WiFi、蓝牙、RFID等室内定位技术[3-5]均通过接收点的RSSI数值及相应定位辅助算法来确定信号接收点的位置,但由于本身的局限性,此类技术仍无法摆脱对外部信号的依赖。信号源等基础设施成本较大,并且需要定期维护,一旦某一组件发生故障,可能就无法正常定位;且由于信号跳变问题,定位的高精度化也存在许多难题。因此,研究一种不需要外部信号源的室内定位方式是解决此类问题的可选方案。对此,有学者曾提出WiFi与惯导系统相结合的室内定位导航优化方式[6-7],或探讨基于惯导系统原理的无信号源室内定位技术的理论可行性。然而,仍缺少成熟有效且简便易行的方案将惯导系统应用于室内定位导航。在此背景下,本文设计了一种基于惯导系统原理和智能手机内置低分辨率传感器(不借助外部信号)的室内定位技术,无须额外硬件,低成本,易普及。
二、模型构建与误差修正
采用目前智能手机平台中较为普及的Android 4.0系统作为研发环境,设计流程如图1所示:①通过Android平台的API读加速度传感器和方向传感器相关参数;②对传感器的原始数值进行误差修正;③通过惯导模型计算设备位移值并显示在手机屏幕地图上。
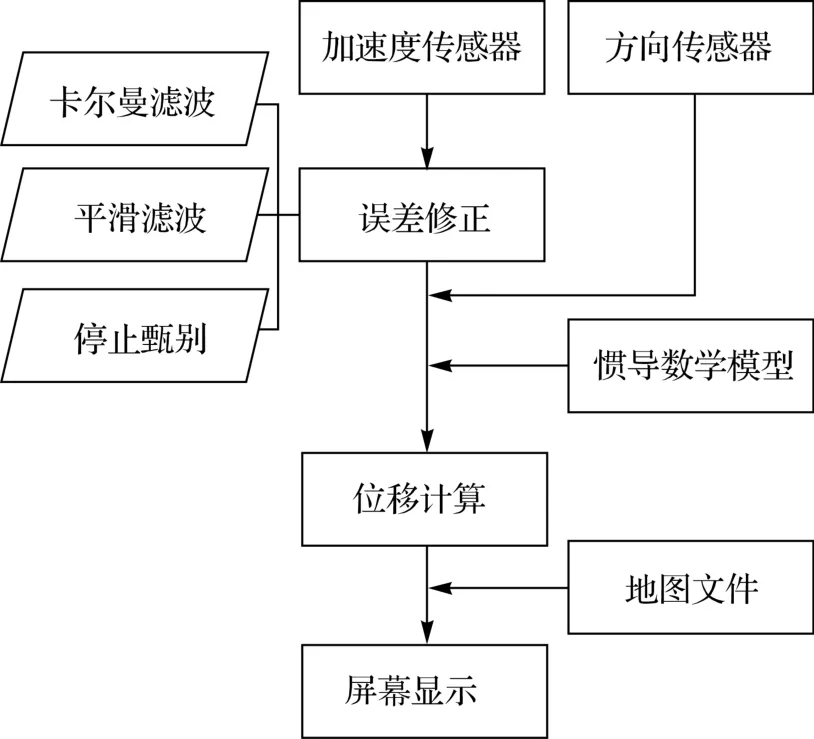
图1 设计流程图
1.模型构建
通过手机传感器组件获得的三轴加速度、方向偏转等参数,是基于手机坐标系的相对数值,无法直接应用于地理坐标计算,因此需要进行三维坐标转换。考虑到三维坐标转换的计算量大[8],而手机CPU浮点运算速度较慢这一现状,将问题简化为二维坐标的转换。故只需知道手机在水平面上的旋转角度θ即可。设地理坐标系为n,手机坐标系为b,坐标转换矩阵为c,可得到如下坐标转换公式

经此转换矩阵可将手机坐标系中的加速度值转换为地理坐标系中的坐标值。对所获得加速度的数值在时间上进行二次积分,可得到位移量。
x方向的位移量

2.误差修正
加速度传感器在获取数据时,存在固定误差,使得加速度计数值与真实值之间存在一定偏差。如图2所示为静止时的三轴加速度值,可以明显发现:当设备处于静止状态时,加速度传感器存在着固定偏差(不同设备的及不同轴的偏差不尽相同,需对各轴数据进行均值),且在一定范围区间内波动。为了降低偏差,可在多次试验后,记录下传感器的加速度偏差值a1,以及运动过程中传感器测得的加速度值a2,并通过公式a=a2-a1得出实际的加速度值。
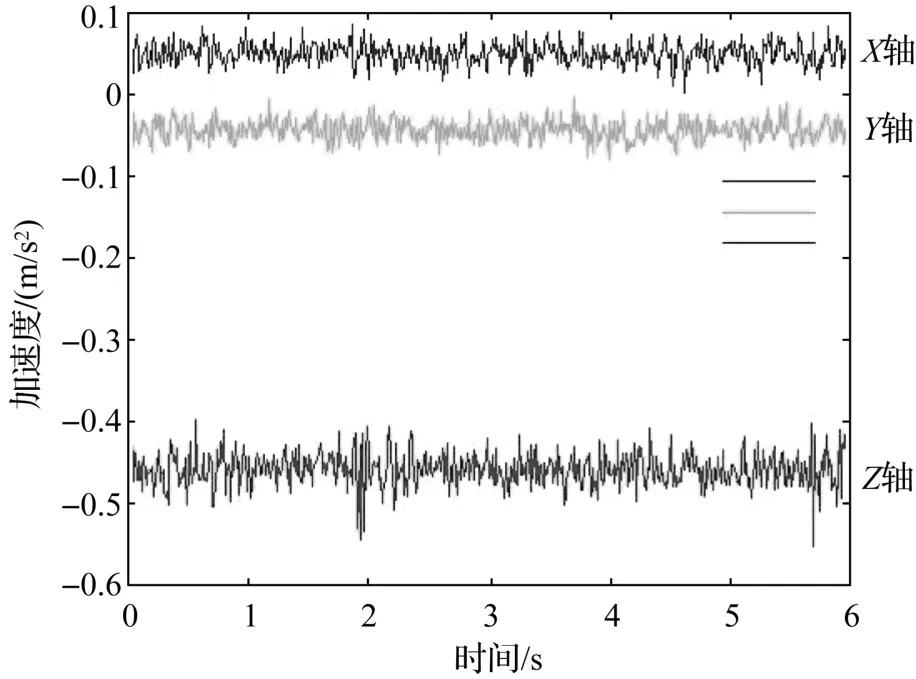
图2 静止时获得的三轴加速度值
目前手机中搭载的微机电传感器(micro-electro-mechanical systems,MEMS)精度较低[9],且由于传感器组件的噪声、人行走时的自然抖动和数据的跳变,手机中MEMS加速度传感器测得的数据存在较大误差。为了使数据能够满足室内定位的精度需求,先后设计使用卡尔曼滤波算法、平滑滤波算法及停止甄别算法进行修正处理,减少加速度积分过程中产生的累计误差。
(1)卡尔曼滤波算法
卡尔曼滤波算法[10-11]是一种自回归数据最优化处理算法,以最小均方误差为估计的最佳准则,消除MEMS传感器数据中的高斯白噪声。由于手机的数据运算能力有限,就需要对卡尔曼滤波算法进行简化。通过对卡尔曼滤波算法中的矩阵计算部分进行简化,达到数据处理和误差修正的目的。
图3为采用卡尔曼滤波法处理人行走时加速度数据的前后变化,其中虚线代表原始数据,实线为处理后的数据。由图3可见,经过卡尔曼滤波能够有效消除数据中存在的偏差值,使得数据变化更加平缓。

图3 卡尔曼滤波法前后数据对比

(2)平滑滤波算法
对数据进行平滑滤波处理,使数据更加稳定,能够有效处理因行走过程中的抖动造成的数据波动问题,从而便于后续运动状态的判断。
(3)停止甄别算法
由于设备在停止运动时,加速度传感器的数值并非为0,因此系统本身无法识别设备是否处于停止状态;同时此类情况还会显著增加加速度积分过程中的累计误差。为了达到室内定位精度,就需要通过数据分析对设备的运动状态进行判断。通过试验发现,人在正常行走过程中会出现近似于简谐运动的波动曲线,而在停止时加速度数据会逐渐趋于0。因此,首先根据加速度传感器的固有误差设定一个阈值,再将加速度传感器收集的数据以20个为单位进行分组,检测每组数据中达到该阈值的个数。如果所有超过70%的数值都小于阈值,就可以认为设备处于已经停止的状态,即可将相应的速度加速度参数重置为0。
三、测 试
本文选择华东师范大学资源与环境科学学院楼宇进行实地测试。试验使用带有相应传感器的不同型号的多部Android系统智能手机。测试过程中首先量取10 m长的一段距离,并记录由不同型号手机的传感器所获得加速度数据以进行位移推算(各型号手机均在相同的环境下进行了多次采集,最后数据取平均值),结果见表1。从表1中数据可以看出,通过滤波算法的修正,数据可以达到每10 m 1~2 m的误差值(取平均值为1.8 m)。

表1 不同型号手机试用结果
四、评价与分析
对比目前国际主流的室内定位研究方式,大多是通过外源信号实现的。而其中WiFi网络的无线定位技术由于普及度高且部署相对简易、成本较低而备受关注。而与这类定位方式不同,本文方案的优点在于:①通过手机内置的低精度传感器,不需要依赖外部信号源,不会存在因为信号跳变引起的定位错误,在适用性和普及性上具有重要的优势。②通过通用Android系统的API进行程序开发,无论是开发成本还是使用成本都低于WiFi等依靠外部信号的室内定位方式。
然而,惯性导航技术是20世纪六七十年代用于空间制导的军工技术。基于惯导系统的室内定位研究仍存在需要解决的问题:①传感器精度过低。目前手机并没有将室内定位导航纳入考量范围,因而其使用的传感器精度都相对较低,对于实现分米级乃至厘米级的高精度室内定位还远不够。目前已经出现了高精度意法半导体传感器[12],如若手机内置传感器能够更新,精度问题也会得到改善。②累计误差过大。与传统定位方式相比,累计误差是基于惯导系统的室内定位方式的主要误差来源,累计误差会随着加速度在时间上的积分而不断变大。因此,如何有效减小累计误差是影响该种定位方式普及的关键。③多坐标系的相互转换仍是难点。现阶段智能手机的运算能力较弱,无法在短时间内完成复杂大量的计算,这也需要手机芯片运算能力的提升来解决。
五、结束语
本研究通过对惯导系统的模型简化,使用手机内置传感器并设计相关算法修正误差,实现了一定精度的室内定位功能,取得具有一定可行性的成果方案,但是仍然面临诸多限制条件。如为了减小空间坐标系的复杂度,而将三维坐标转换降为二维平面坐标。但实际数据表明,即使能够有效地解决三维坐标实时转换的计算问题,手机传感器也无法达到更高的精度。因此,提升手机内置传感器硬件的精度水平,是进一步优化室内定位效果的关键问题。而在无法改造硬件的情况下,本文所提出的解决方案基于现有手机,具有低成本、易用的优势。
[1]邓伟,邓超,龚健,等.GPS精度检测系统可行方案设计[J].电子制作,2012(11):124-125.
[2]谢翔,荆昊,郭际明.室内环境下手机GPS定位精度研究[J].测绘通报,2012(8):95-98.
[3]MENENDEZ P,CAMPOMANES C,TRAWINSKI K.Topology-based Indoor Localization by Means of WiFi Fingerprinting with a Computational Intelligent Classifier[C]∥Intelligent Systems Design and Applications(ISDA). [S.l.]:ISDA,2011:1020-1025.
[4]THAPA K,CASE S.An Indoor Positioning Service for Bluetooth Ad Hoc Networks[C]∥The 36th Annual MidwestInstructionandComputingSymposium (MICS).Duluth MN:MICS,2003:98-103.
[5]TESORIERO R,TEBAR R,GALLUD J A.Improving Location Awareness in Indoor Spaces Using RFID Technology[J].Expert Systems with Applications,2010,37(1):894-898.
[6]ZHANG R,BANNOURA A,HOFLINGER F,et al.Indoor Localization Using a Smart Phone[C]∥Sensors Applications Symposium(SAS).[S.l.]:SAS,2013:38-42.
[7]胡天琨,叶建芳.基于手持设备的室内定位系统设计与实现[J].微型机与应用,2012,31(13):4-6.
[9]徐瑞,朱筱虹,赵金贤.惯性导航标准现状及标准体系探讨[J].测绘科学,2013(1):1-8.
[8]柯金朴.空间三维坐标转换原理及实现[J].江西测绘,2008(3):16-20.
[10]单九生.卡尔曼滤波原理及其因子选取和初值确定[J].江西气象科技,1998,21(4):10-13.
[11]陈建新,王荣,章韵.MEMS加速度传感器的距离测量性能分析[J].电脑与电信,2011(11):30-32.
[12]周鑫,章从福.意法半导体(ST)发布用于先进消费电子产品的下一代高性能惯性传感器模块[J].电子设计工程,2012(11):178-181.
An Indoor Positioning Solution without External Source Signals Based on Mobile Built-in Sensors
ZHANG Yanbing,SHEN Jiaqi,YUE Daian,TANG Xi
为解决无信号源区域的室内定位问题,设计了一套基于惯导系统原理和智能手机内置低分辨率传感器(加速度和方向传感器等基本组件)的室内定位技术。使用卡尔曼滤波算法、平滑滤波算法、停止甄别算法等对传感器数据进行误差修正,实现了室内定位每10 m达到1.8 m误差的精度。最后,针对可用性等问题与传统有外源信号的室内定位方式进行对比分析。
室内定位;惯导系统;智能手机
P228.4
B
0494-0911(2014)10-0060-03
2013-09-09
张砚炳(1992―),男,山东淄博人,主要从事GIS与室内定位研究。
唐 曦
张砚炳,沈嘉琪,岳岱安,等.基于手机内置传感器的无外源信号室内定位方案[J].测绘通报,2014(10):60-62.
10.13474/j.cnki. 11-2246.2014.0329
