基于空间变论域的自适应时空耦合模糊控制器
2014-08-03李伯全郭建慧
谢 鸥 李伯全 郭建慧
(1.苏州科技学院机械工程学院,江苏 苏州 215009;2.江苏大学机械工程学院,江苏 镇江 212013)
现实中大量的工业过程,如石油、化工、炼钢及轧钢等,不仅涉及到非线性、不确定性、大时滞及时变性等特点,而且还具有较强的空间分布特性,称之为时空耦合系统[1]。针对时空耦合系统,传统的集总参数和分布参数控制方法都存在一定的局限性。近年来模糊控制因其独特的非线性处理能力和鲁棒性使其获得了大量的应用。文献[2,3]提出了一种3-D模糊逻辑控制器,将模糊控制应用于空间信息的处理。文献[4]进一步考虑了空间模糊度的概念,在物理上建立了空间的隶属度。由于空间分布物理量动态变化,而模糊控制器的隶属度函数、控制规则是根据经验预先总结确定的,在控制过程中无法进行修正,不具有学习和适应的能力,从而导致系统控制精度低、稳态误差大。笔者引入变论域理论思想[5],提出一种空间变论域的自适应时空耦合模糊逻辑控制器设计方法。
1 问题描述①
对于一类空间分布系统,要求控制系统的某一空间分布物理量精确地跟踪或恒定在某一设定的空间分布曲线上。时空模糊集在传统模糊集的基础上增加了表达空间信息的第三维,时空模糊集表示为:

0≤fz(x),fx(z)≤1
式中fx(z)——空间隶属函数;
fz(x)——时间隶属函数。
考虑两输入单输出时空耦合模糊控制器,输入采用三角形隶属度函数,输出采用单平面隶属度函数。采用线性规则库,规则结构形式如下:
(1)

基于拓展的规则平面推理法可获得时空耦合模糊控制器的解析模型:
其中n为空间传感器个数,σ(zp)=E(zp)+R(zp),γ-1(zp)=1+2μip(Ep),A为输入论域相邻模糊子集的中心距,B为输出论域相邻模糊子集的中心距,u为系统输出,hu(z)为空间加权因子。
从时空耦合模糊控制器的解析模型可知,时空耦合模糊控制是采用有限的二维模糊集通过空
间加权来拟合逼近全局空间的非线性控制,这必将导致两个问题:第一,在初始状态下,为了使远离控制目标的空间点快速靠近控制目标,必将增大控制输出,从而使本来接近控制目标的空间点将出现偏离控制目标的大扰动;第二,当整体空间的控制量接近控制目标的时候,由于控制误差趋于微小,原有的控制论域分辨率无法判别输入,使输出陷入“死区”,导致出现过大的稳态误差。基于此,笔者提出一种随时间、空间动态变化论域和空间加权因子的自适应时空耦合模糊系统,以减小系统的稳态误差和扰动,提高控制精度。
2 时空耦合变论域
2.1 空间模糊论域初始化
对于空间分布系统,空间变量的动态变化导致不同的空间点位置上系统输入变量的动态变化范围不同。传统的固定初始空间论域(图1)必然无法处理局部的空间差异,只能进行全局的粗糙控制,无法实现高精度时空耦合控制。笔者提出的改进空间模糊初始化论域如图2所示。不同空间点的论域大小由该点的系统输入变化区间决定。设f(zp)=xmax(p=1,2,…,n)为系统输入变量在各空间点上的最大取值,则时空耦合模糊初始论域为[-f(zp),f(zp)]。

图1 时空耦合论域
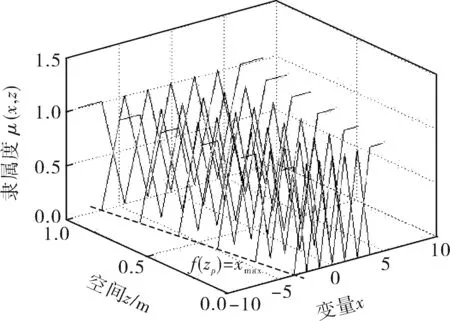
图2 时空耦合变论域
2.2 时空模糊变论域伸缩因子
定义1 ∀e∈E,z∈Z⊂Rn,称函数α(z):E(z)→[0,1],e(z)→α(e,z)为论域E(z)=[-L(z),L(z)]的一个空间伸缩因子,如果满足条件:
a. 对偶性,∀e∈E,z∈Z⊂Rn,α(-e,z)=α(e,z);
b. 避零性,∀z∈Z⊂Rn,α(0,z)=ε,ε为充分小的正数;
c. 单调性,∀z∈Z⊂Rn,α(z)在[0,L(z)]上严格单调增;
d. 协调性,∀e∈E,z∈Z⊂Rn,|e(z)|≤α(e,z)L(z);
e. 正规性,∀z∈Z⊂Rn,α(±L(z),z)=1。
初始论域[-L(z),L(z)]经过伸缩因子α(e,z)变换为[-α(e,z)L(z),α(e,z)L(z)]。由于时空耦合系统是随时间和空间变化的动态系统,故“建筑”在论域之上的隶属度函数Aij(e(t,z),t,z)、Bij(r(t,z),t,z)、Gij(u(t,z),t,z)是随时空动态变化的。这使得控制规则(1)成为一组动态规则:
(2)
从而适应了系统输入的变化,等效于动态地对规则库进行了调整,但某一时刻的规则总数却没有改变。
2.3 时空模糊自适应空间加权因子
某空间点的空间加权因子hu(z)的大小决定了该点处的状态对整体控制的影响,对于某空间分布系统,如果输入偏差大的空间点的加权因子增大将导致整体控制输出增大;如果输入偏差小的空间点的加权因子增大将导致整体控制输出的减小。
在初始状态,由于不同空间点的控制量偏离控制目标的程度相差较大,为了避免小偏差空间点出现大的扰动,必须加大这些空间点的加权因子而减小大偏差空间点的加权因子,使整个空间分布控制量平稳过渡到被控目标;当所有空间点的控制量都逼近被控目标时,则需加大偏差大空间点的加权因子而减小偏差小空间点的加权因子,以便快速地稳定到控制目标,称之为“变换主导空间点”。笔者采用分段变空间加权因子方法,基于输入偏差实时修正空间加权因子,实现时空耦合模糊控制的自适应空间加权,其算法具体如下:
其中Emax(t)表示某个时刻所有空间点的最大输入值;ε、γ、λ为设计参数,它们的值可以根据不同的控制对象进行设定,λ和γ为充分小正数。分段阈值ε不能设置太小,否则将影响系统的快速性。
3 仿真实例
考虑化工过程中的一个催化反应器,如图3所示,反应物从A进入,从B输出,整个催化反应在催化棒上进行。反应为放热反应,而期望的反应温度为0℃,所以该反应需要加一个外部冷却源以保证催化反应的正常进行。

图3 棒式催化反应器示意图
假设反应器不与外界发生热交换,则下面的偏微分方程能够预测空间温度T(z,t)(z∈[0,π])的变化趋势:
βU[b(z)U(t)-T(z,t)]-βTexp(-τ)
边界条件T(z,t)=0,z=0;T(z,t)=0,z=π;
T(z,t)=T0(z),t=0
其中,βT为无量纲的反应热,βT=16;βU为无量纲的传热系数,βU=2;τ=2为无量纲的活化能。当无外界控制输入时,设初始状态T0(z)=sin(z),该时空耦合系统是内部不稳定系统,如图4所示。
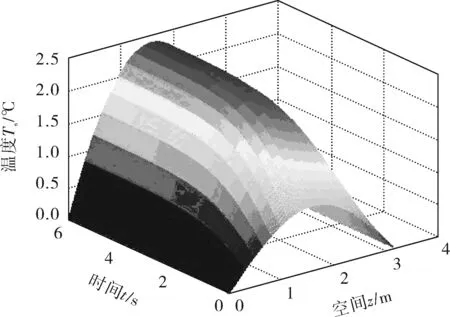
图4 无控制输入温度曲面
图5~7分别给出了固定论域固定空间加权因子与变论域变空间加权因子时的系统仿真输出。结果表明变论域自适应时空耦合模糊控制能有效抑制扰动,减小稳态误差。
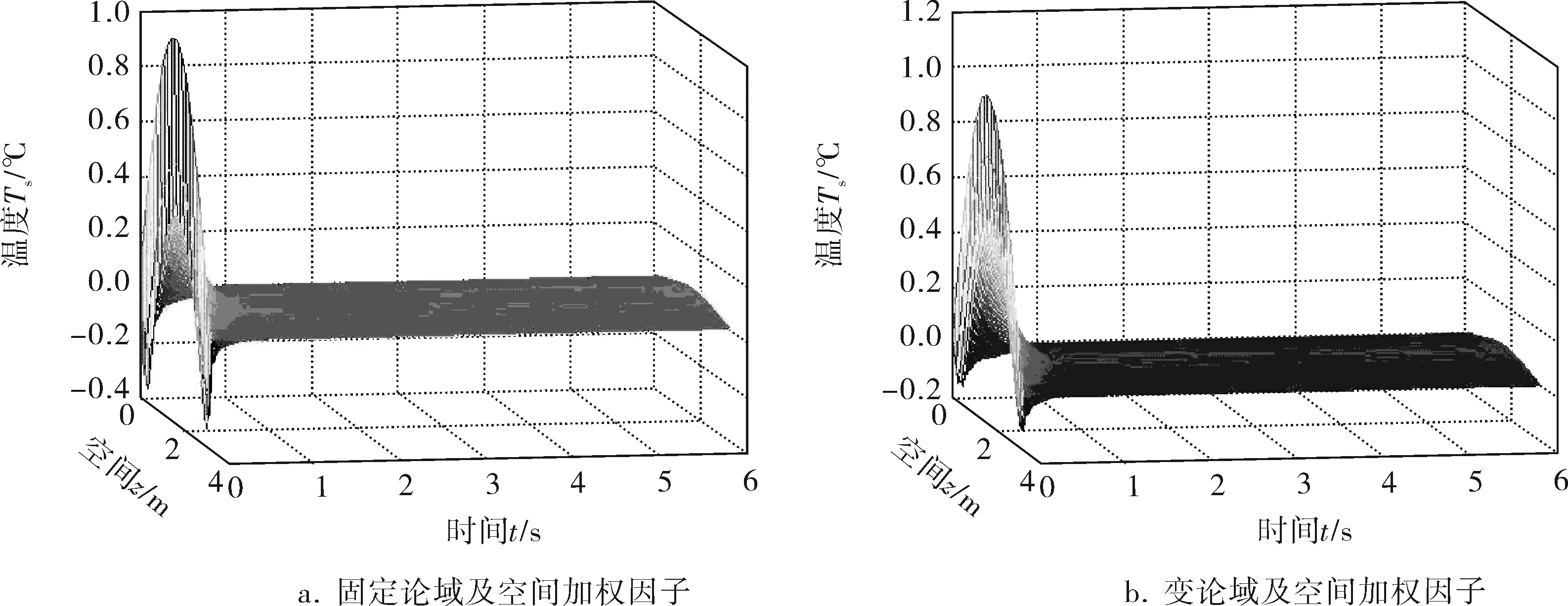
图5 空间温度分布
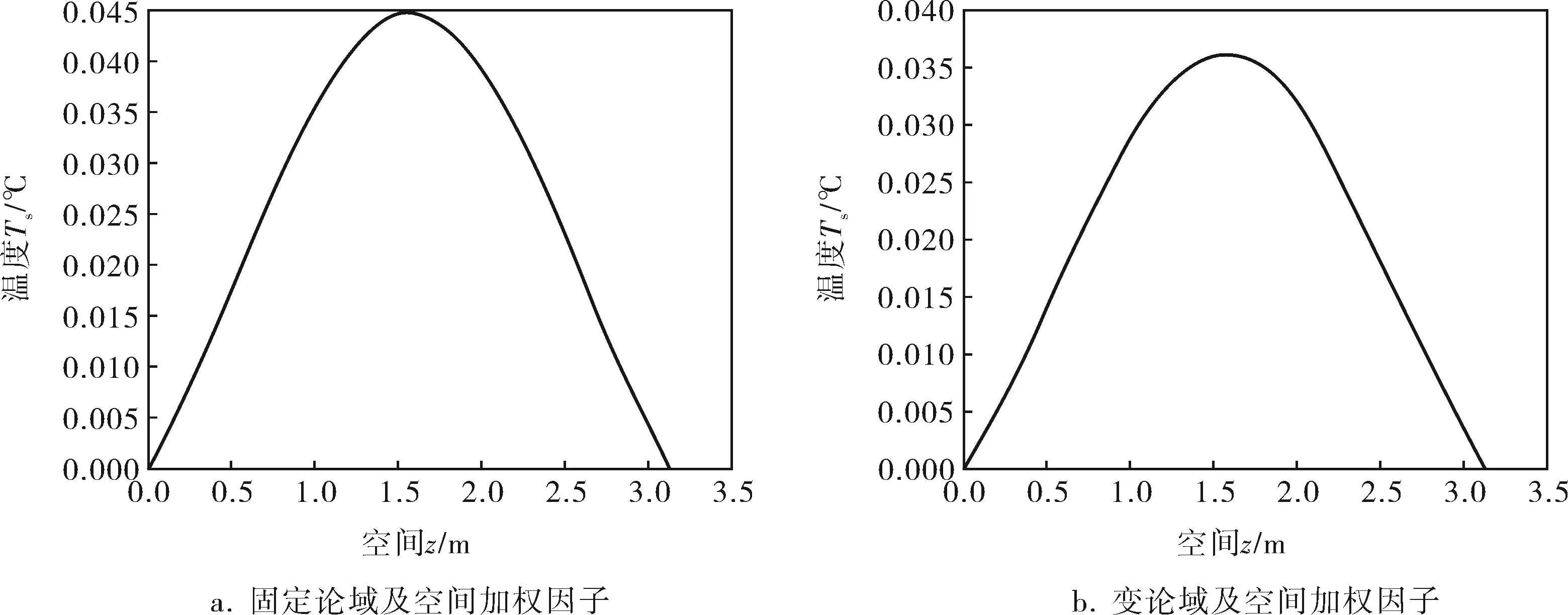
图6 稳态误差

图7 z=0点扰动误差
4 结束语
针对时空耦合系统控制精度低和扰动的问题,在时空耦合模糊集的基础上引入变论域思想,提出了一种空间变论域自适应时空耦合模糊控制器的设计方法。基于空间输入信息,在线实时调整时空耦合模糊集的论域和空间加权因子,很好地抑制了临界点扰动,减小了稳态误差。仿真算例也验证了该方法的有效性。