一种新的FH迭代学习控制器设计
2014-08-03李艳辉周秀杰
李艳辉 张 畅 周秀杰
(东北石油大学电气信息工程学院,黑龙江 大庆 163318)
迭代学习控制(Iterative Learning Control,ILC)在给定时间内以简单的学习算法可以实现对期望轨迹的高精度跟踪,其基本原理是利用先前的控制信息不断修正控制输入,使系统跟踪性能随迭代次数逐步得到改善,且不依靠精确的数学模型,因而被广泛应用于机器人、航天控制及工业生产等领域[1~3]。在工程控制中,系统的复杂性、元器件的老化和对系统的简化处理,都会导致其数学模型不精确,从而直接影响控制效果,因此,考虑系统的不确定性是十分必要的。文献[4]利用鲁棒控制律处理系统中的不确定性,将鲁棒控制与ILC相结合,实现对被控系统的零误差跟踪。文献[5]分别针对常参数化、时变参数化的不确定性,利用类Lyapunov方法设计控制器,实现对误差轨迹的完全跟踪,然而,当系统存在扰动时,文献[4,5]的跟踪效果将会受到影响,甚至导致系统不稳定。
在实际生产过程中不可避免地存在各种外界干扰,这些干扰会大大降低系统的控制性能,因此,许多学者对如何抑制扰动进行了深入研究[6~9]。文献[6,7]分别提出带有衰减因子或时变遗忘因子的迭代学习控制算法,利用因子来减少扰动对控制量的影响。然而,这两种算法虽具有良好的控制效果,却没有考虑系统中不可预见的参数变化。文献[8,9]针对存在干扰的情况,分别设计了不同的高阶ILC控制器,并给出了其收敛条件,但系统的输出误差仍较大,跟踪效果不理想。
笔者针对存在初态误差、不确定性和干扰的情况,设计了非线性时变系统的新的FH ILC控制器。该控制器利用反馈控制克服不确定性和干扰的影响,同时利用ILC提高系统的跟踪性能,并采用λ-范数理论对提出的新的FH ILC算法进行收敛性证明。仿真实例表明在满足一定的收敛条件下,当系统的初态误差和输出干扰有界时,跟踪误差有界收敛,且该算法显著地提高了系统的跟踪精度和收敛速度,对干扰有较强的抑制能力。
1 问题描述①
考虑下列一类具有不确定性或干扰的重复非线性时变系统:
(1)

为不失一般性,假设该系统满足如下特性:
a. 存在R0∈Rm×r,使|I+R0C(t)B(xi(t),t)|≠0;
b. 初始误差有界,即‖xd(0)-xi(0)‖≤bx0,∀i。
笔者的目标是,在新的ILC控制器作用下,从任意有界的初始状态x0(t)开始,系统输出yi(t)在有限时间上能满意地跟踪上期望轨迹yd(t)。
为了证明新的FH迭代学习控制器的有效性,给出以下引理。
需要注意的是,初始状态通常设定成与期望值相同[9],然而这种严格的初始定位条件在实际中是很难满足的。
为表达简便,以下公式的书写在没有歧义时省略时间变量t。
2 主要结果
考虑形如式(1)的系统,传统的高阶ILC方法跟踪误差较大,对干扰的抑制能力不强,而反馈控制在系统受到外部扰动和系统参数发生变化时,能够保证系统的鲁棒性,因此,笔者将反馈控制与ILC相结合,设计了具有如下形式的新的FH迭代学习控制器:
(2)

综合考虑反馈和前馈部分,则此控制器可表示为:
(3)
笔者针对具有不确定性和输出干扰的重复非线性系统(1),提出一种如式(3)的新的FH ILC算法,下面采用λ范数论证此算法的收敛性。
证明
为表达方便,做如下定义:
bC1sup‖C(t)‖,bC2
bx0‖δxl(0)‖,bV1
根据系统(1)和新的FH ILC算法(3)可得:

Q0Vi+1-R0C(δfi+1+δBi+1ud+δWi+1)+
利用Lipschitz条件,由上式可知:
d0+c0‖δxi+1‖}
(4)

根据牛顿-莱布尼兹公式可知:
‖δxl‖=‖xd(t)-xl(t)‖

其中σ=kf+kBbud+kW。对上式两边取λ范数可得:
(5)
(6)

(7)


(8)
ei=δyi=yd-yi=Cxd-Cxi-Vi=Cδxi-Vi,进一步取λ范数可得:
‖ei‖λ≤bC1‖δxi‖λ+bV1
(9)
证毕。
需要注意的是,式(5)、(8)和(9)清楚地表明,对于任意ε>0,总存在正数δ,当干扰界bV1→ε时,‖ei‖λ→δ;当ε→0时,有δ→0,即输出干扰的界越小,控制精度越高,跟踪效果越理想。
在系统具有不确定性、初态误差个输出干扰的情况下,新的FH迭代学习控制器有效地提高了跟踪误差的收敛速度和控制精度,增强了对干扰的抑制能力。根据提出的控制律(3),笔者归纳出新的FH ILC算法:
a. 置i=0,设定初始状态xi(0)和初始控制ui+1-k(t),k=1,2,…,N,(t∈[0,T]),并存储期望轨迹yd(t)(t∈[0,T]);
b. 根据控制输入ui(t)(t∈[0,T]求出实际输出yi(t)(t∈[0,T],并存储;
c. 计算跟踪误差ei(t)=yd(t)-yi(t)(t∈[0,T]),根据学习律(3)计算并存储新的控制输入ui+1(t)(t∈[0,T]);
d. 检验迭代停止条件,若满足条件则停止运行;否则执行步骤e;
e. 令i=i+1,返回步骤b。
3 仿真实例
考虑如下单关节机器臂非线性模型:

3.1 传统PD型高阶ILC
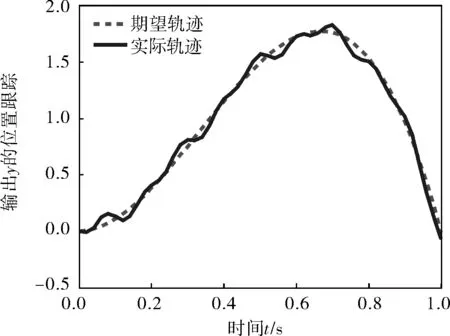
图1 第20次迭代关节位置响应
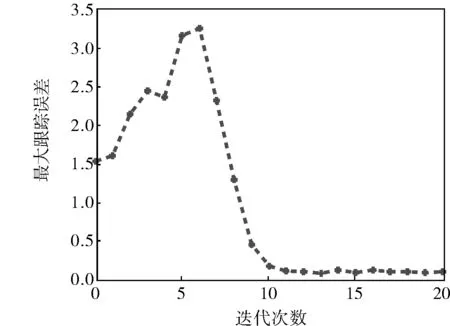
图2 跟踪误差响应过程
由图1、2可知,虽然实际轨迹和期望轨迹大致趋势相同,但由于扰动的影响,经过20次迭代后仍存在较大的波动;且跟踪误差在前几次迭代过程中出现阶段性增大的情况,经过15次迭代以后,跟踪误差降为0.1,跟踪精度不理想。
3.2 新的FH ILC
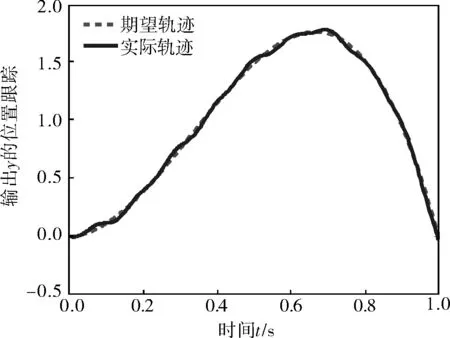
图3 第10次迭代关节位置响应
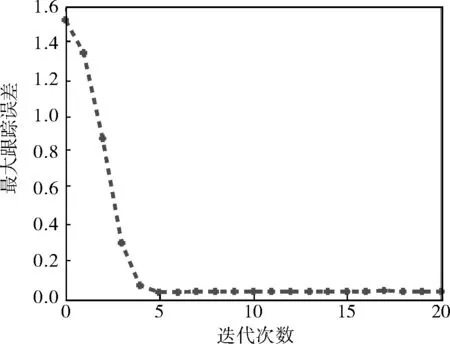
图4 跟踪误差响应过程
由图3、4可知,经过10次迭代后,新的FH ILC控制器实现了对期望轨迹的良好跟踪,且仅经过4次迭代,跟踪误差已约为0.05。与采用传统高阶ILC算法相比,采用新的FH ILC算法系统的跟踪精度和收敛速度得到有效提高,抗干扰能力得到明显增强。
4 结束语
给出一类重复非线性时变系统的新的FH ILC算法,通过引入反馈控制来补偿控制量以减小跟踪误差,从而消除不确定性和干扰的影响。在满足一定的收敛条件下,通过仿真实例表明了当系统的初始状态误差、系统输出干扰有界时,跟踪误差有界收敛,且该控制器能在较少的迭代次数内实现对期望轨迹的高精度跟踪,对干扰有较强的抑制能力。