化工过程切换控制研究中的连续特性
2014-08-02罗雄麟左瑞香
罗雄麟 左瑞香 许 锋
(中国石油大学自动化研究所,北京 102249)
化工工业生产的复杂性要求工程师对化工过程进行实时监控。通常在生产过程还未达到稳态就又有了新的输入变化,导致输入变量的持续动态变化,将这种输入变量不断切换变化的控制方式称为化工切换控制。对于化工过程切换控制的仿真称之为化工切换控制仿真。不同于系统达到稳态后才可以改变输入变量或子系统的传统切换控制,化工切换控制的切换点为非稳态点,切换点左导数不为0(只有切换点为稳态点时,切换点左导数才为0)。例如文献[1~3]中无论是升温过程的多模控制、大时滞化工过程的控制方案切换控制还是冷凝器的工况切换控制,在发生切换时系统均未达到稳态。
通过对实际化工切换控制的研究发现,由于控制系统的非线性及响应延迟等特性,使得系统控制量发生变化时系统的响应输出并未立即发生变化,而是有一段延迟,使得响应曲线在切换点处连续、平滑。因此,响应曲线上切换点处不但要求函数连续,而且各阶导数也应连续。而在现有的切换控制仿真中,无论是优化计算最优切换时间点[4~7]还是控制方法的应用仿真[8,9],都只考虑了切换前后状态相同——函数连续性,忽略了切换点的导数连续性,一般误认为是左导数为0,即初始斜率为0,导致错误的研究结果。
笔者提出一种新的化工切换控制仿真算法,在切换点处不仅考虑子系统的函数连续性,还考虑了导数的连续性,将前一子系统的末端状态和末端斜率作为下一子系统的初始状态和初始斜率,保证切换点处的连续性。通过实例仿真发现,在引入导数连续性的化工切换控制仿真算法后切换控制曲线在切换点处缓和、平滑,提高了化工切换控制仿真结果的精确度和曲线的逼真性。
1 化工切换控制连续特性算法①
在化工过程中由于生产或工艺的要求在修改输入变量值时系统通常还未达到稳态。将这种未达到稳态就先行切换的方式称之为动态切换,反之,将处于稳态情况下的切换称之为稳态切换。在图1所示的切换方式中,A点为稳态点,B、C为非稳态点。

图1 化工过程切换分析
定义1 化工切换控制中,在切换点t处,要求系统状态满足x(t+)=x(t-)=x(t),即系统状态在t处的左极限等于右极限,这里将其定义为切换点的函数连续性。

设化工切换控制系统为:
(1)
其中,子系统微分方程fj=Ajx(t)+Bju(t),j=1,2,…,N。其中N为子系统个数;u为常量或变量,u=[u1,u2,…,uN];t=[t0,t1,…,tN]。步长h=(tj-tj-1)/n,n为运算步数。令N=3,切换时刻分别为t1、t2。基于以上两个定义分步递推化工切换控制算法。递推算法中Mj,i(j=1,2,…,N;i=0,1,2,…,n)表示第j个子系统中化工切换仿真算法第i步对应的变量M的值。
当t0≤t≤t1时。初始时刻t=t0,初始状态x(t0)=x0,执行以下化工切换控制递推算法:




整理以上每个子系统递推算法可知,化工切换控制算法在j=1时与普通仿真算法无异:
(2)

(3)
同理可以得到三阶、四阶化工切换控制算法。
2 与传统切换控制算法对比分析
目前,基于控制量(例如Bang-Bang控制)或基于子系统的切换控制采用传统的数值仿真算法,只考虑了定义1[3~6]而忽略了定义2的重要性。为方便分析笔者提出的化工切换控制仿真算法和传统切换控制仿真算法的区别,引入二阶Runge-Kutta递推公式[10]:
(4)

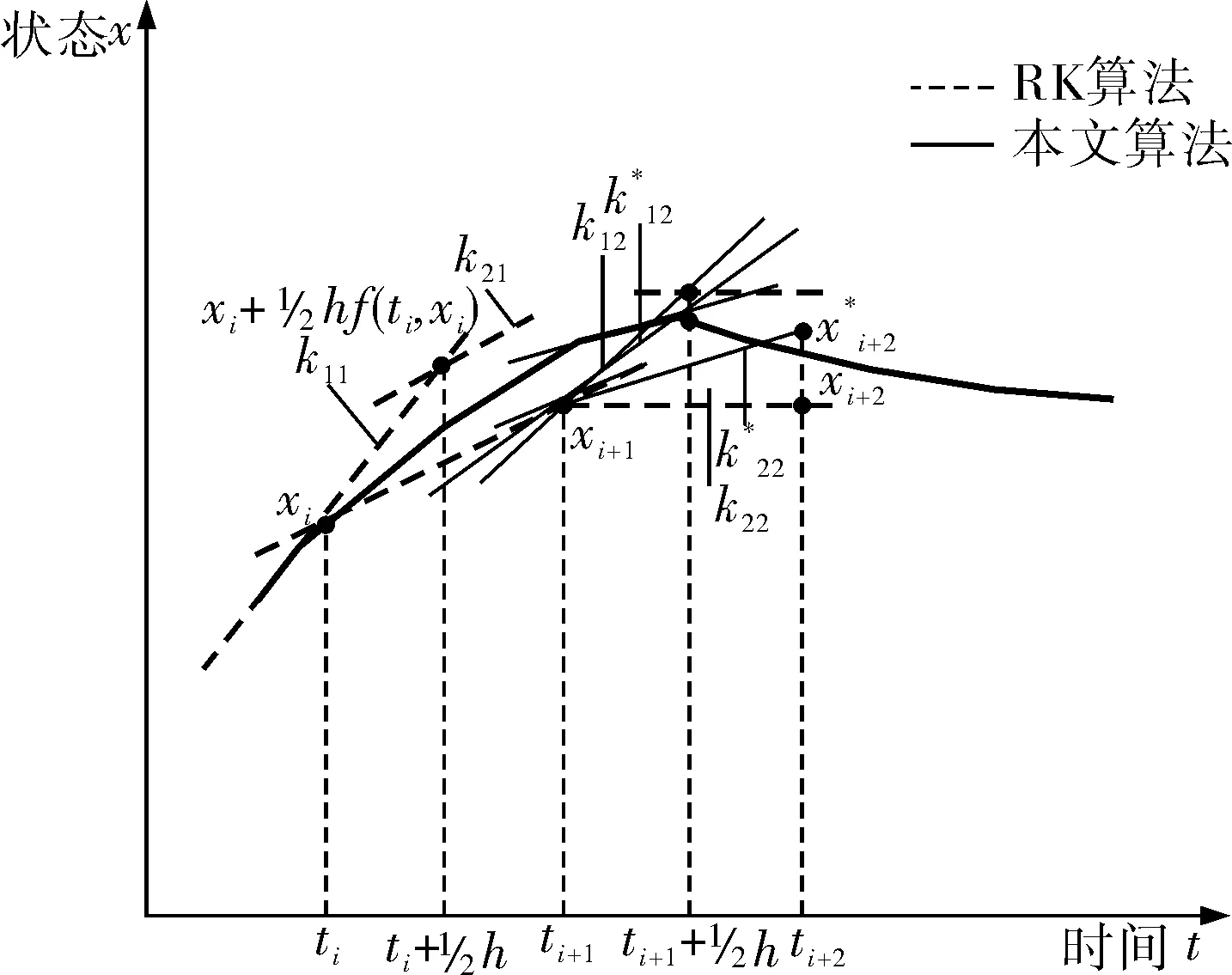
图2 化工切换控制仿真与RK算法仿真
3 实例应用与对比分析
3.1 经典实例1
范德波尔方程[4~7](van der Pol equation)为:
初始状态x0=[1 1],u在-1和+1之间切换,u={-1,1,-1,…},达到末端状态xT=[0 0]。采用四阶化工切换控制仿真算法,步长h=0.1。参照kaya的最优切换时间段计算方法得,切换次数N=1时的最优切换驻留时间向量为[0.68349 2.40806],N=2时最优驻留时间向量为[0.70949 2.69502 0.53937]。图3为范德波尔方程在化工切换控制算法和普通RK法下从x0到xT的状态图。

图3 系统切换控制状态
3.2 经典实例2
以文献[11,12]中的3个子系统切换为例,子系统状态方程分别为:
其中,t0=0,tf=3,初始状态x0=[4 4]。依据文献选取两组切换控制方式:t1=1,t2=2,u=0.5;t1=0.59395,t2=2.78328,u=0,两种方法的切换控制状态如图4所示。
由图3、4可以看出,无论是控制量切换还是子系统切换,基于化工切换算法思想的切换控制仿真得到的系统状态曲线在切换点处切换相对平滑;而传统切换算法下系统曲线在切换点处,切换陡峭,有尖角出现,不符合实际应用中切换控制的特性,且两者的结果差值均在30%以上。

图4 基于子系统切换的状态
3.3 串级连续搅拌釜式反应器
以Henson和Seborg的串级连续搅拌釜式反应器(CSTR)为例进行仿真。假设系统完全混合并且物理参数是常值,这一过程有一个混合了反应物和溶剂的进料流、一个输出流和一个冷却水流。qc为冷却水流量,q为进料流量,C1、C2为出口浓度,T1、T2为出口温度。假设流量在整个过程中维持恒定。系统如图5所示。
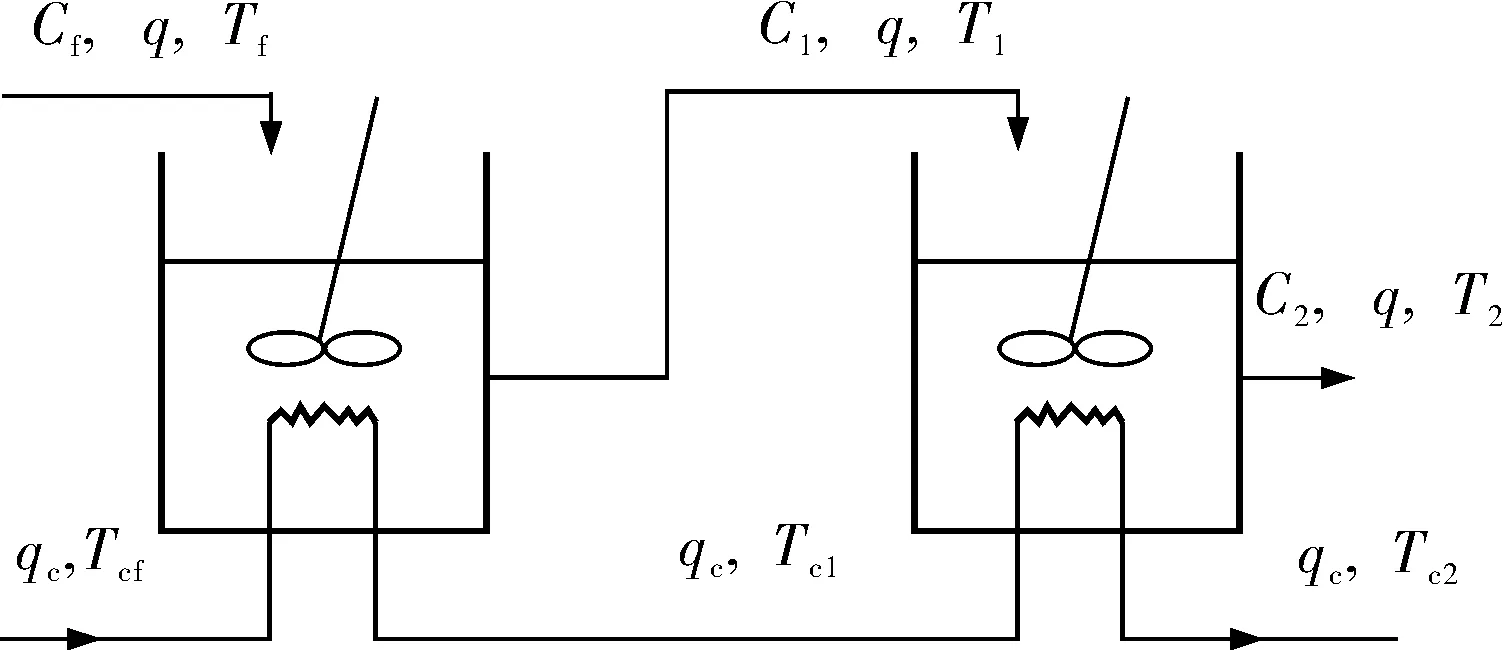
图5 串级CSTR系统
反应器体积V1=V2=100L,进料浓度Cf=1mol/L,进料流量q=100L/min,进料温度Tf=350K,冷却水温度Tcf=350K,反应速率常数k0=7.2×1010min-1,R为理想气体常数,E/R=10000K,E为活化能,密度ρ=ρc=1000g/L,UA1=UA2=1.67×106J/min,反应热ΔH=-4.78×104J/mol,U、A为热交换系数和面积,比热cp=cpc=0.239J/(gK)。
状态变量x、系统输出y和操作变量u定义为x=[C1,T1,C2,T2]T,y=T2,u=qc。设实际过程的初始状态x=[0.085,442,0.005,450]T。
CSTR中的物料平衡方程为:
CSTR中的能量平衡方程为:
选择两组控制量u=[180,35]和u=[120,20]分别进行切换控制,其切换控制状态如图6所示。
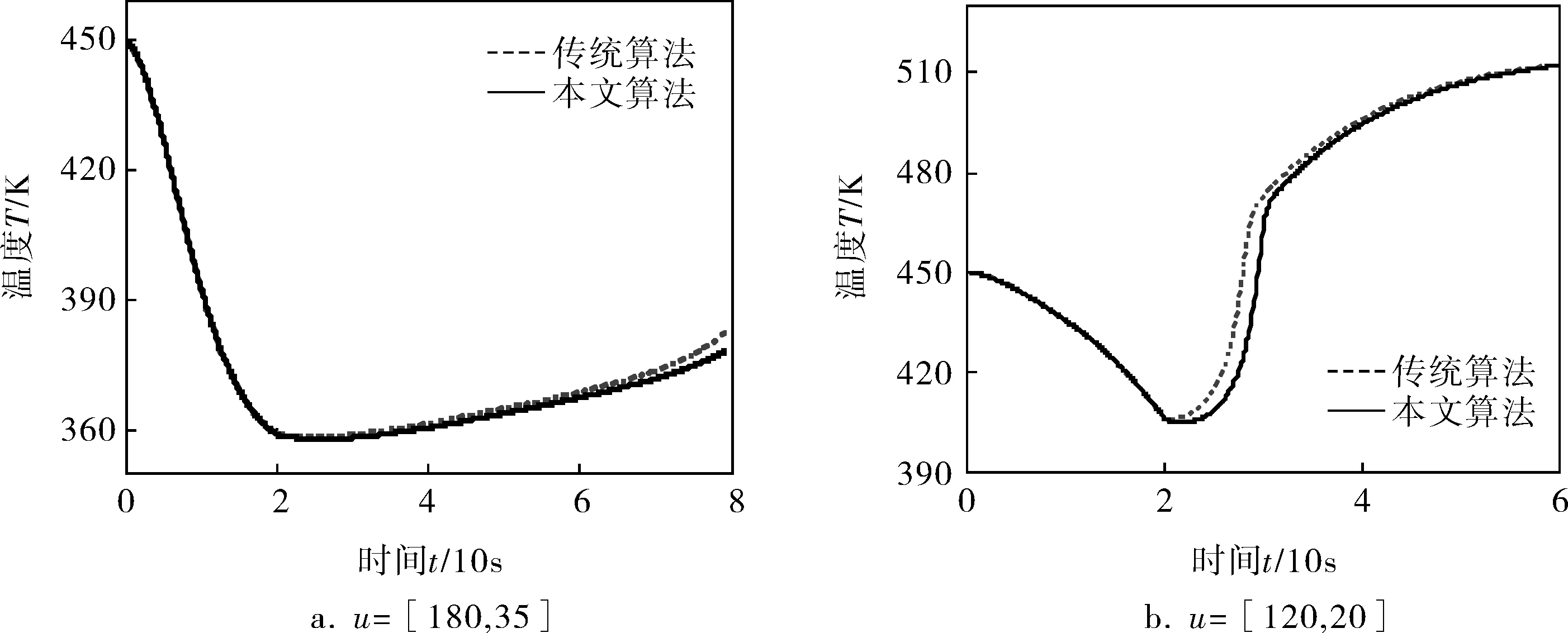
图6 串级CSTR切换控制状态
从图6中可以看出,在化工切换控制仿真算法下的仿真曲线较平滑,更符合实际化工生产过程中的切换控制曲线特性。
4 结束语
通过对实际化工切换控制的研究发现,化工切换控制要求在切换点处必须考虑函数连续性和导数连续性,因此,依据化工切换控制的这一特性提出新的化工过程切换控制算法。通过理论和仿真实例对比发现,该方法使得系统在切换点处过渡平滑,提高了仿真结果近似实际控制系统控制结果的精确性。