新型离散自适应变结构算法在步进梁控制中的应用
2014-08-02鲁照权
鲁照权 周 俊
(合肥工业大学电气与自动化工程学院,合肥 230009)
步进梁输料过程中,由于移动梁本身加上所运的钢坯有数百吨之重,使得移动梁的周期性步进运动具有大惯性特点;由于流量、压力变化及泄漏等因素,使得液压传动机构具有非线性特性。因此步进梁被控对象具有大惯性、非线性及变结构的特点。针对非线性被控对象,被提起最多的是变结构控制,从本质上说,变结构控制是一种非线性系统反馈控制,在系统面对外界的扰动(包括自身的参数摄动)时能很好地通过自身的非线性自适应函数调整控制律使得系统具有不变性。目前讨论较多的是连续时间系统,并且已有了很多变结构方面的理论成果,但是随着计算机技术的发展,特别是DSP技术的成熟,对离散时间系统变结构控制的要求越来越高[1]。通过将连续的趋近律离散化就产生了各种离散趋近律控制策略,最初提出的指数趋近律设计离散变结构控制,使系统表现出一定的鲁棒性,但缺点是系统状态接近滑动模态面时易产生抖振且不能收敛于原点[2]。之后很多学者在此基础之上提出了一些改进的趋近律,主要思路是在指数趋近律中引入非线性函数来解决两个问题:系统的状态如何从任意的初始位置快速地逼近滑动模态面;系统状态如何能够以弱小的抖动最终收敛于原点。恒速趋近律解决不了这两个问题之间的矛盾,在满足快速性逼近的同时无法保证抖动弱小,因此后续的变速趋近律分别针对两种不同阶段采取不同的趋近律进行切换,然而由于切换条件难以确定,再加上切换可能导致系统产生不可预知的抖动,后续又有人引入了一种实数范围内可导有界的双曲正切函数,较好地解决了上述切换过程中平滑过渡的问题,同时在趋近律中结合了扰动上限的补偿[3],但是在进入准滑动模态区之后未能针对抖动的振幅进行有效的限定,导致在系统受到抖动较大的扰动时,无法起到较好的消抖作用。文献[4]提出了一种基于自适应切换增益的变结构离散控制,能够根据不确定扰动项的大小来自适应调整切换增益,但是趋近律的设计中却并没有充分考虑到平滑过渡问题。笔者正是结合了上述两种方法的优点,设计了一种趋近律既能快速地从任意初始状态趋向于准滑动模态面并收敛于原点,又能根据扰动不确定项上确界来自适应调整增益达到变结构控制中消抖的目的。①
1 电液伺服系统的组成
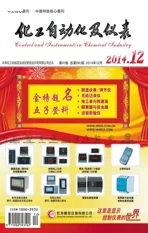
电液比例伺服控制系统的组成如图1所示,系统主要包括控制器、伺服放大器、伺服阀和液压缸。本项目背景是基于山东临沂轧钢厂的加热炉步进梁运动控制系统,以PLC为控制核心,通过332模块完成数模转换和信号放大,并输出控制电压,现场的开环控制优点在于步进梁在输送500t以上的钢坯负载时无振荡,但是低精度的位移和机械延迟使得系统在每一个步进周期中都要进行频繁的步距调整,无法保证出料端的钢坯能够无偏差地放于出料辊端[5]。改进的基于电液比例伺服控制系统的闭环控制系统采用RHM-MD70S1G3100型磁致伸缩位移传感器来提供同步实时的活塞绝对位移输出。通过SSI接口完成与控制器的数据通信,为闭环控制提供反馈通道。
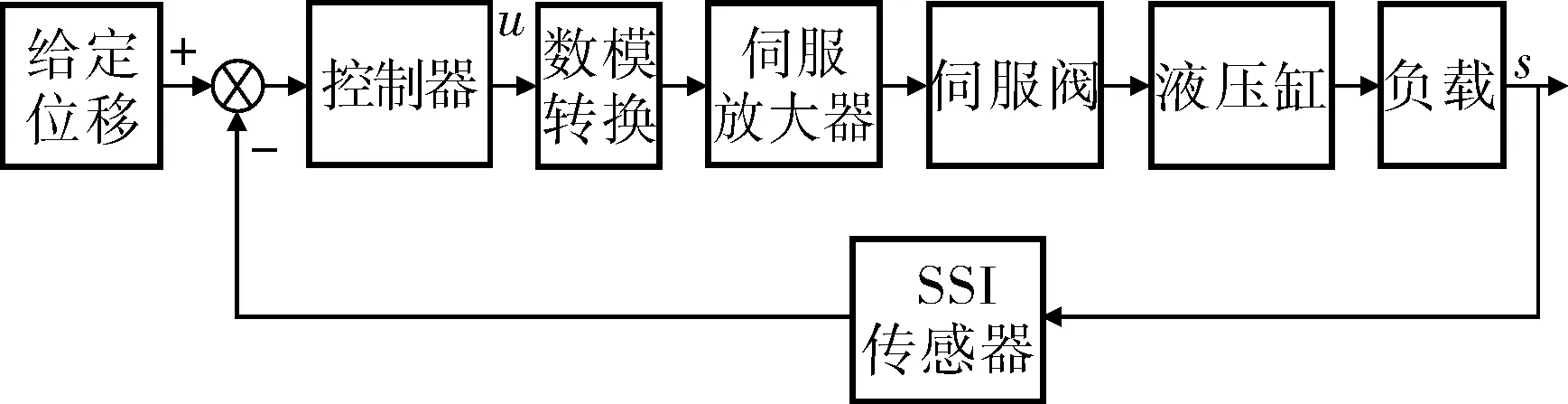
图1 电液伺服控制系统组成框图
2 电液伺服系统的离散线性数学模型
考虑到伺服放大器和伺服阀的动态远高于系统的负载响应,将伺服放大器和伺服阀等效成比例环节,设两者的增益依次为Kv、Ksv。图2为电液伺服控制系统原理示意图,采用零开口的四边滑阀,4个节流窗口是匹配和对称的,因为活塞中有杆腔与无杆腔的面积大小不同,因此在活塞外伸与内缩时系统的模型是有差异的。限于篇幅,笔者只讨论活塞外伸的情况。
图2 四边滑阀控制下的非对称液压缸模型示意图Ap——液压缸活塞有效面积; Bp——活塞以及负载的粘性阻尼系数; Cep——液压缸外泄漏系数; Cip——液压缸总泄漏系数; FL——作用在活塞上的任意外负载力; K——负载弹簧刚度; mt——活塞和负载以及整个活塞上连接一起的附件总质量;p1、p2——无杆腔、有杆腔油液压力; pL——控制缸两腔压力差值绝对值;q1、q2——液压缸进油、回油流量;V1、V2——无杆腔、有杆腔体积; xv——液压缸位移。
采用恒压变量柱塞泵为系统提供油源压力,故在此假定油源压力ps恒定,回油压力p0为零,为了忽略管道中的压力损失和管道动态,假定阀与液压缸的连接管道对称且短而粗,并且假定液压缸每个工作腔内各处压力相等,油温和体积弹性模量为常数,介质油液是不可以压缩的,液压缸内、外泄漏均为层流流动,阀的各节流口流量系数相等[6]。
基于以上假设,电液伺服阀的线性化流量方程为:
qL=Kqxv-KcpL
(1)
式中Kc——流量-压力系数;
Kq——流量增益;
qL——系统负载流量。
利用液压缸的流量连续方程可以求得:
(2)
式中xp——活塞位移;
Vt——总压缩容积;
βe——有效体积弹性模量。
液压缸和负载的力平衡方程为:
(3)
将式(1)~(3)化解合并并进行拉氏变换,可得:
(4)
最终可求得:
Xp=
(5)

y=xpsinθ
(6)


y=cx
(7)
式(7)的通解为:
(8)
设控制力零阶保持,即:
u(t)=u(kT),kT≤t≤(k+1)T
(9)
其中T为采样周期,取t0=kT,可知u(τ)在上述区间恒为常数u(kT),得:

y(k)=cx(k)
(10)

3 离散趋近律的设计
对于式(10)表示的离散非线性系统取切换函数为:
s(k)=Cx(k)
(11)
其中x(k)∈R3×1,令s(k)=Cx(k)=0。由式(11)得到系统的滑动模态面,对于变结构设计的内容,按照不同的运动阶段分为两个部分:设计离散趋近律使得系统从任意初始状态出发都可以快速趋近滑动模态面;确定C的值,使得系统到达滑动模态面之后能够保持良好的动态性能。对于离散趋近律的设计,文献[3]通过引入tansigx函数,巧妙地解决了变速趋近律在远近切换中带来的不稳定抖动问题,趋近律如下:
s(k+1)=(1-qT)s(k)-εTtansig(‖x‖)sgn(s(k))
(12)
其中ε、T、q分别为到达速度、采样周期和趋近速度参数。
当‖x‖→+∞时有:
(13)
式(12)变为:
s(k+1)=(1-qT)s(k)-εTsgn(s(k))
(14)
即典型的指数趋近律(Exponential Reaching Law)。当‖x‖→0时,依据洛必达法则有:
(15)
(16)
即典型的变速趋近律。当系统从距离原点较远的初始状态开始运动至滑动模态面的过程中,函数的连续可导性质使得指数与变速趋近律的切换过程平稳,而且最终在原点收敛。缺点是该方法并没有充分考虑到在滑动模态运动过程中抖动幅度的控制问题,文献[4]则从这一角度提出了一种自适应增益切换趋近律:
s(k+1)=μs(k)-ηsgn(s(k))
(17)
并给出了在这一趋近律条件下的抖振幅值:
(18)

(19)
η(k)=[1+λsgn(s(k))sgn(s(k-1))]η(k-1)
η(0)≥0
其中Dm为扰动的上确界。
该方法的优点是能够根据系统状态所处的运动阶段来自适应地递推调整趋近律增益,并且系统的抖振幅值得到了良好的控制。然而单一的趋近律仅仅通过简单的增益递推调节难以应对对抗抖动要求较高的场合,通过表达式sgn(s(k))·sgn(s(k-1))来判断系统的状态所处的运动阶段是一种很经典的方法,然而当系统的状态处于原点附近并且有着高频快速的抖动时,该方法就不一定能够对系统的状态产生准确的判断,从而导致错误的增益调节,无法快速削弱抖动。
通过对上述两种方法进行比较,笔者提出一种结合二者优点的新趋近律,具体为:
s(k+1)=μs(k)-tansig(α‖x‖)sgn(s(k))
(20)
将式(20)代入式(10)中,忽略不确定扰动项得到控制律如下:
(21)
此时的实际趋近律为:
s(k+1)=μs(k)-tansig(α‖x‖)sgn(s(k))+D(k)
(22)
由严格的不等式达到条件|s(k+1)|<|s(k)|可得系统的收敛条件:
(23)

(24)
到达滑动模态面之后有s(k+1)=-s(k)。综上,系统从任意的初始状态运动到达准滑动模态面区之后将产生抖振,且振幅为:
(25)
由式(25)可知,振幅与tansig(α‖x‖)和不确定扰动项D(k)的大小有关,和式(17)不同的是,此处是通过调节函数中的参数因子α的值来使得tansig(α‖x‖)逼近扰动项D(k)的值以达到削弱振幅的目的,考虑到准滑动模态面区是在s(k)=0上下邻近区域,因此将tansig(α‖x‖)在‖x(k)‖=0处进行泰勒展开:
(26)

α≤2Dm/‖x‖
(27)
其中D(k)≤Dm,针对式(19)中所述的自适应律的不足,进行如下改进:

(28)
在上述自适应律的调节下参数α数值变大,s(k)从初始状态以大步距接近准滑动模态面,由s(k+1)=-s(k)可知进入准滑动模态区的状态s(k)一直处于穿越原点的抖振状态中,从稳、准、快的角度来看,控制的关键是缩短抖振的时间、控制幅值达到原点的精度和有效地控制抖振的振幅,双曲正切函数的特性保证了收敛的速度和抖振幅值的衰减控制,而α在自适应律的调节下数值减小,保证了收敛于原点的精度[9,10]。
4 系统的鲁棒稳定性
定理1 采用式(28)所示的自适应切换增益,在式(21)变结构控制律的作用下,具有扰动上确界的离散系统式(10)具有鲁棒稳定性。

5 系统的MATLAB仿真
系统式(6)中各参数的取值:Kq=3.17m2/s,Kc=1.38×10-12m5/(N·s),Ap=0.0616m2,Cip=4×10-12m5/(N·s),Vt=1.96×10-2m3,βe=1×109Pa,Kce=Kc+Ctp=5.38×10-12m2/s,mt=1×105kg,步进梁所输送的钢坯属于惯性负载,故令K=0N/m,且忽略系统的粘滞阻力,则有Bp=0N·s/m。令采样时间T=0.001s,将以上参数代入式(10)中,可得:

图3 3种趋近律控制下的活塞位移输出
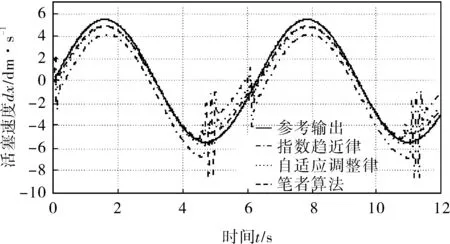
图4 3种趋近律控制下的活塞速度输出
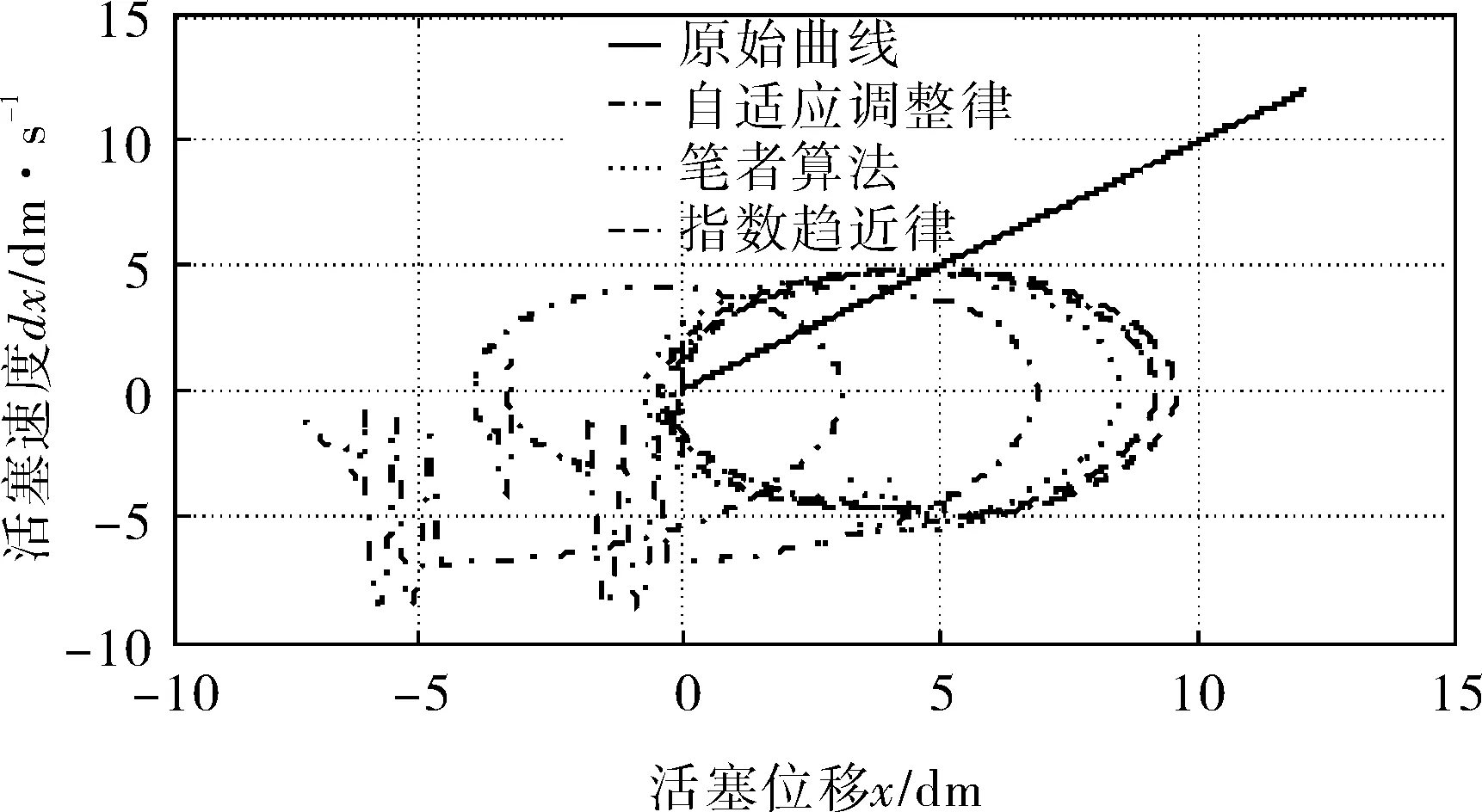
图5 3种趋近律控制下的系统相平面输出
由图3可知在指数趋近律控制下的系统鲁棒性较差,无法在大惯性负载扰动下保持良好的位移跟踪,最高处误差可达7dm,无法满足正常的工业生产要求,虽然采用式(17)中的增益自适应控制下系统的跟踪误差有所减小,但是在6s处由于扰动的阶跃变化产生的脉冲干扰信号对其输出波形产生了一定的振荡,在实际输送钢坯的过程中会严重磨损钢坯和步进梁的接触面,缩短步进梁的使用寿命。图4在指数趋近律和增益自适应趋近律控制下的输出表明两者的速度在干扰作用下都产生了局部振荡,在步进梁上升至等高线和在速度的峰值处尤为明显,最高振幅分别达到6dm/s和2dm/s,而新的自适应趋近律只有0.5dm/s。图5表明在正弦信号的输入作用下,三者最终都处于以原点为奇点的无阻尼运动中。图3、4中指数趋近律由于常值切换在第一周期产生明显振荡。
6 结束语
仿真结果表明笔者提出的新的离散自适应变结构控制策略较好地解决了鲁棒性与消抖之间的矛盾。系统趋近运动通过α的正向递推保证了变结构控制中的大增益切换,使系统获得强鲁棒性,在滑动模态阶段,通过α的负向递推,削弱了滑动模态区的振幅,达到了消抖的目的,结合tansig(α‖x‖)函数的连续切换效果,综合改善了非线性系统的稳态与动态性能,该算法简单、有效且易实现,在实际中具有较高的应用价值。