木材表面强化与装饰自动化生产线ZY-06L型机械手运动分析与仿真1)
2014-08-02王鸿钧
吴 昊 王鸿钧
(红河学院,云南·蒙自,661100)
木材表面强化与装饰自动化生产线ZY-06L型机械手运动分析与仿真1)
吴 昊 王鸿钧
(红河学院,云南·蒙自,661100)
通过建立机械手的运动学方程,结合机械手在实际工作环境中的位置坐标参数与需要搬运物件的位置坐标,代入求解方程,得到机械手末端执行器位姿与各关节变量之间的关系。运用大型工程软件UG NX8.0对机械手进行建模与仿真,分析结构设计与工作流程设计的合理性。仿真结果显示:机械手工作可达范围满足设计要求,末端执行器在初始位置、物件初始位置、物件目标位置时的位姿与预期值相符,末端执行器速度与过载变化情况均在设计要求范围内。机械手运动方程建立与求解正确,运动动作合理,机械手机构方案可满足设计要求。
木材加工;机械手;运动学方程;仿真分析
Through building the manipulator kinematics equations combined with the manipulator location coordinates and the location coordinates of requires moving objects in the actually environment, we solved the equation to obtain the relationship between manipulator end-effectors position and respective joint variables. We used engineering software UG NX 8.0 for modeling and simulation of the manipulator, and analyzed the rationality of structural and workflow design. With the simulation results, the displacement of manipulator end-effectors can achieve the design requirements. When the end-effectors are in the initial position, the object initial position and object target location, the position and attitude are consistent with the expected value, and the speed and load changes are within the scope of the design requirements.
工业机械手(工业机器人),是现代工业先进制造技术的重要体现,在汽车、航空航天、机械、IT等许多工业门类中发挥着重要作用。工业机械人与柔性制造系统相结合,改变了制造系统的基本式样,极大提高了生产自动化程度、效率和产品质量[1-2]。工业机器人正朝着智能化、高精度、高效率、多功能的方向发展[3-4]。
机械人在林业生产中的采伐、储运、木材检测等环节中发挥着重要作用[3],但是在诸如木材深加工等非金属材料自动化生产线中,由于木材材料的各向异性以及原材料、生产方法、加工工序、产品样式的多元化以及成本控制和生产规模等综合因素,导致了在木材深加工生产线中的使用率较低,仅有少数功能针对性强的工业机械人投入应用[5-8]。
“木材表面强化与装饰自动化生产线”是专为大型木材深加工企业进行研发配套的设备,主要产品为家具、家装用板材和木地板板材,能够根据客户的需求对板料进行表面强化处理和纹饰加工。ZY-06L型机械手是该生产线的重要组成部分,在系统中承担着来料分配、木料工序间转运和生产线中心枢纽的作用,对提高生产线效率与产品质量起着重要作用。由于不同批次产品的生产工序、流程和加工工位变化较大,因此机械手的工作流程和运行轨迹需根据不同批次的产品及时进行调整和编制。机械手在生产线中的工作可达范围、末端执行器及所搬运物料的位姿、速度、过载等运动参数,直接关系到整条生产线和所生产产品的性能,是机械手是否满足生产线要求的重要指标。因此,通过建立机械手的运动方程和计算机三维虚拟模型,对机械手进行仿真,精确模拟机械手在该生产线最主要产品加工过程中的运行情况,是对机械手结构和运行轨迹进行优化设计,确定机械手性能的重要依据。机械手运动方程,还是控制系统研制与程序开发的重要基础和参考。
1 机械手结构
机械手由底座支撑、旋转底座、下臂、中臂、上臂、摆臂、末端执行器等主要结构件和驱动原件与控制模块组成(见图1)。该机械手的设计,主要用于车间内各种板料或半成品构件的搬运、分配和码放工作。由于物料需要在车间内多个工位之间来回挪动,物料的空间位姿较为复杂,对机械手的承载能力、自由度、工作范围和效率要求较高,对运动精度则要求相对较低;故机械手旋转底座、下臂、中臂、上臂、摆臂和末端执行器均采用液压驱动,并通过角度传感器反馈控制各关节变量误差在设计要求范围内,符合实际要求。

1.底座支撑;2.旋转底座;3.下臂;4.中臂;5.上臂;6.摆臂;7.末端执行器;8.手腕液压马达;9.摆臂液压马达;10.液压缸。
图1 ZY-06L机械手

2 运动方程
空间开链机构中,各构件由关节(通常为移动副和转动副)连接,开链机构的一端安装在机座(相对)上,另一端则连接末端执行器。各关节由驱动器(电机、液压缸、液压马达等)进行驱动,关节的相对运动导致机构的运动,进而决定了末端执行器在空间三维坐标中的位置和姿态(简称位姿)。机构运动学方程的建立及求解,根本目的是建立机构末端执行器位姿与各关节变量之间的关系,进而更好的对机构进行研究和优化,为机构的设计提供理论依据,为控制系统的研究提供基础与参数。
将机构中各构件视为刚体,则构件在空间中的运动即成为刚体的空间运动。刚体的空间任意运动均可视为两个分运动的合成,绕某轴线的转动与沿某轴线的平移[1]。因此,将机械手的主要结构件视为刚体,则可建立机械手的机构运动简图(见图2)。
机械手机构运动简图中各坐标系变换关系如下:
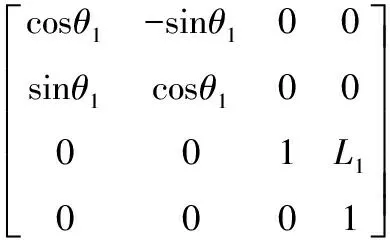
坐标系x0y0z0→x1y1z1,先绕z0轴偏转θ1,再沿z0轴平移L1;
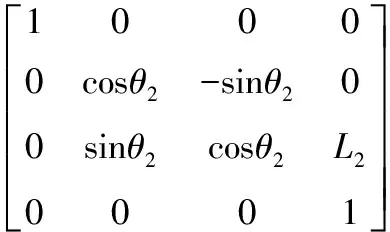
坐标系x1y1z1→x2y2z2,先绕x1轴偏转θ2,再沿z1轴平移L2;
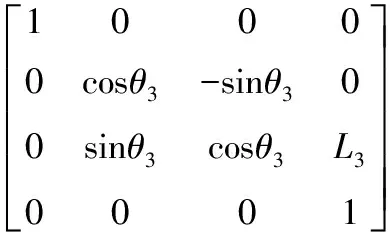
坐标系x2y2z2→x3y3z3,先绕x2轴偏转θ3,再沿z2轴平移L3;
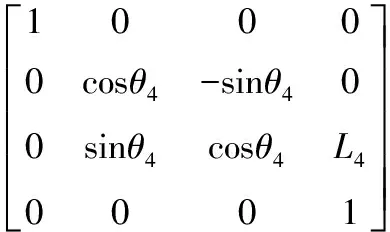
坐标系x3y3z3→x4y4z4,先绕x3轴偏转θ4,再沿z3轴平移L4;
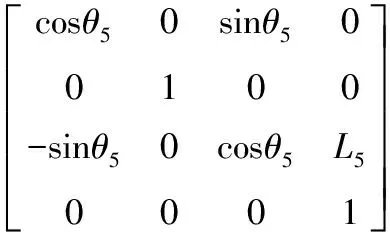
坐标系x4y4z4→x5y5z5,先绕y4轴偏转θ5,再沿z4轴平移L5。
坐标系齐次变换矩阵参数见表1。
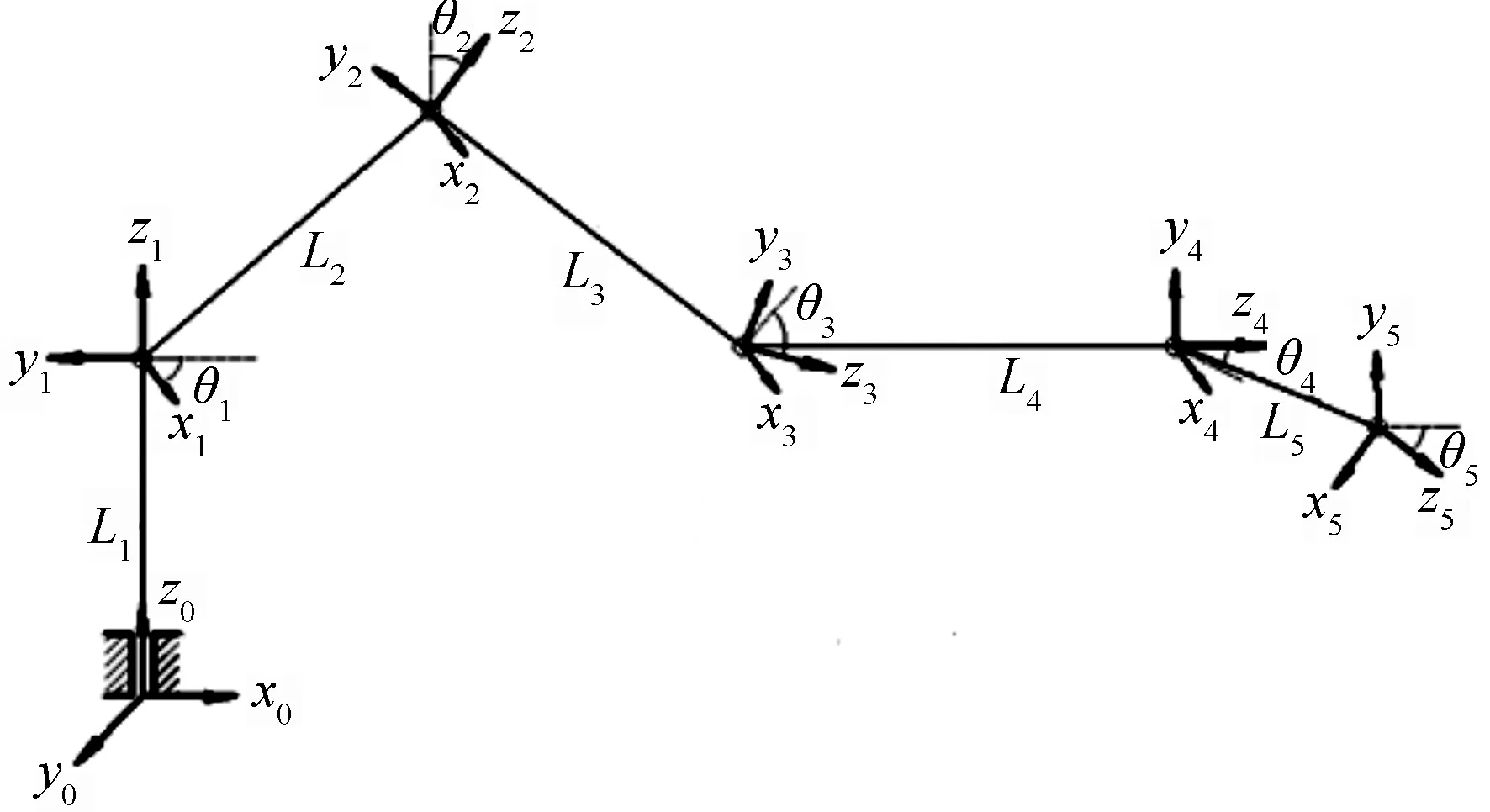
图2 机械手机构运动简图

杆件号关节变量杆件扭角杆件长度1θ10L12θ20L23θ30L34θ40L45θ50L5

式中:
A1=cosθ1cosθ5-sinθ1cosθ2cosθ3sinθ4sinθ5+ sinθ1sinθ2sinθ3sinθ4sinθ5-sinθ1cosθ2sinθ3cosθ4sinθ5- sinθ1sinθ2cosθ3cosθ4sinθ5;
B1=-sinθ1cosθ2cosθ3cosθ4+sinθ1sinθ2sinθ3cosθ4+ sinθ1cosθ2sinθ3sinθ4+sinθ1sinθ2cosθ3sinθ4;
C1=cosθ1sinθ5+sinθ1cosθ2cosθ3sinθ4cosθ5- sinθ1sinθ2sinθ3sinθ4cosθ5+sinθ1cosθ2sinθ3cosθ4cosθ5+ sinθ1sinθ2cosθ3cosθ4cosθ5;
D1=L5sinθ1cosθ2cosθ3sinθ4-L5sinθ1sinθ2sinθ3sinθ4+L5sinθ1cosθ2sinθ3cosθ4+L5sinθ1sinθ2cosθ3cosθ4+L4sinθ1cosθ2sinθ3+L4sinθ1sinθ2cosθ3+L3sinθ1sinθ2;
A2=sinθ1cosθ5+cosθ1cosθ2cosθ3sinθ4sinθ5- cosθ1sinθ2sinθ3sinθ4sinθ5+cosθ1cosθ2sinθ3cosθ4sinθ5+ cosθ1sinθ2cosθ3cosθ4sinθ5;
B2=cosθ1cosθ2cosθ3cosθ4-cosθ1sinθ2sinθ3cosθ4- cosθ1cosθ2sinθ3sinθ4-cosθ1sinθ2cosθ3sinθ4;
C2=sinθ1sinθ5-cosθ1cosθ2cosθ3sinθ4cosθ5+ cosθ1sinθ2sinθ3sinθ4cosθ5-cosθ1cosθ2sinθ3cosθ4cosθ5- cosθ1sinθ2cosθ3cosθ4cosθ5;
D2=-L5cosθ1cosθ2cosθ3sinθ4+L5cosθ1sinθ2sinθ3sinθ4-L5cosθ1cosθ2sinθ3cosθ4-L5cosθ1sinθ2cosθ3cosθ4-L4cosθ1cosθ2sinθ3-L4cosθ1sinθ2cosθ3-L3cosθ1sinθ2;
A3=sinθ2sinθ3sinθ4sinθ5+cosθ2cosθ3sinθ4sinθ5+ sinθ2sinθ3cosθ4sinθ5-cosθ2cosθ3sinθ4sinθ5;
B3=sinθ2cosθ3cosθ4+cosθ2sinθ3cosθ4-sinθ2sinθ3sinθ4+ cosθ2cosθ3sinθ4;
C3=-sinθ2cosθ3sinθ4cosθ5-cosθ2sinθ3sinθ4cosθ5- sinθ2sinθ3cosθ4cosθ5+cosθ2cosθ3cosθ4cosθ5;
D3=-L5sinθ2cosθ3sinθ4-L5cosθ2sinθ3sinθ4-L5sinθ2sinθ3cosθ4cosθ5+L5cosθ2cosθ3cosθ4-L4sinθ2sinθ3+L4cosθ2cosθ3+L1+L2+L3cosθ2;
A4=0;B4=0;C4=0;D4=1。
通过以上建立的机械手运动学方程,根据机械手实际工作状况代入位置坐标参数,求解该方程即可得到机械手末端执行器位姿与各关节变量之间的关系[10-11]。进而可以对机械手的实际工作与运动情况进行更深层次研究,为机械手运动/动力学仿真提供参数支持;也可为机械手控制系统的研究奠定基础。
3 运动分析与仿真
UG NX8.0运动仿真分析模块UG/Motion,提供机构运动/动力仿真分析功能。运动仿真可以对机构进行运动干涉分析,运动轨迹跟踪,分析机构中零部件的位移、速度、加速度、作用力、反作用力和力矩等。分析结果可以指导对设计进行优化和调整,设计更改可以反映到装配主模型中。
装配好的机械手虚拟模型,需要进行“连杆”和“运动副”的设置,以及“运动方案”和“运动驱动”的加载,建立完整的运动/动力学仿真模型进行仿真。将机械手底座支撑设置为固定接地连杆,其余所有主要结构部件(螺栓、轴承等非主要结构件在运动仿真时除外)均按照实际装配情况设置连杆属性和材料属性,机械手共设置固定和非固定连杆37个。机构零部件被赋予连杆属性后,各连杆之间处于独立状态;需要运动副将分离的连杆连接起来,组成一个虚拟的可动机构[12]。运动仿真中,对机械手简化机构共设置了55组普通运动副和3组特殊运动副,具体类型和数量为:
固定副1组,连接底座支撑与大地坐标系。
滑动副7组,连接机械手上的7个液压缸与活塞。
柱面副1组,连接机械手的摆臂与末端执行器。
转动副(铰链)46组,除固定副、柱面副和滑动副之外,其余所有连杆之间都由转动副连接。在真实机构中,这些构件间均为铰链连接;虚拟仿真中,将其设置为转动副,与真实机构一致。
齿轮连接3组,分别是机械手旋转底座上的驱动齿轮与底座支撑齿轮;驱动摆臂摆动的齿轮组;驱动末端执行器转动的齿轮组。
3.1 运动方案
为了得到机械手工作过程中的各结构件以及关节运动参数,按照机械手实际工作情况模拟一个作业轮回的完整运动过程,以检验各机构和构件动作的合理性以及在任意时间的运动状态[13-14]。
HPLC切换波长法同时测定健脾止泻宁颗粒中盐酸小檗碱和黄芩苷的含量 ……………………………… 黄传俊等(10):1324
根据机械手在生产线中的实际位置,分析得到机械手的初始位置、物件初始位置以及物件目标位置的坐标参数(见表2)。
表2 机械手3种位姿状态下末端坐标参数(参照图2坐标系:x0y0z0)

参数对象坐标值/mm机械手初始位置x0y0z0(1500,0,3200)物件初始位置x0y0z0(-2100,600,4050)物件目标位置x0y0z0(3210,0,4100)
将表2中的坐标参数分别代入机械手运动方程中,解该运动方程可计算得到机械手末端执行器在初始位置、物件初始位置、物件目标位置时的各关节变量值(见表3)。
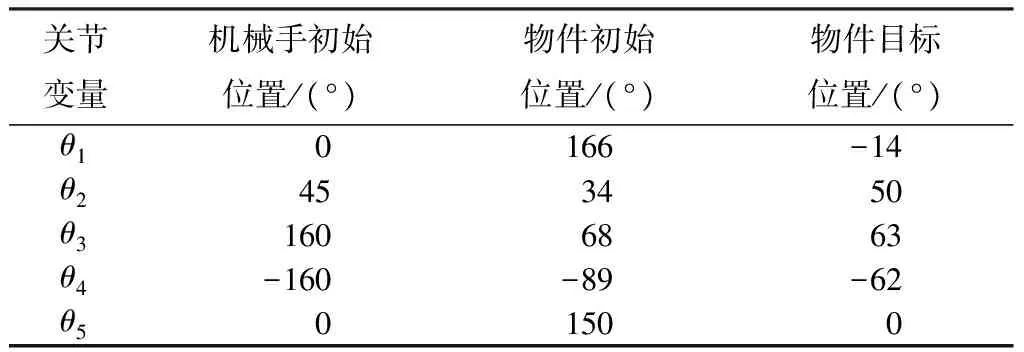
表3 机械手3种位姿状态下对应关节变量
根据表3中参数,并参考机械手周围物体的位置以及所搬运物件的外形,编排机械手运动方案(见表4)。
3.2 运动驱动
参照表4运动方案中各关节变量值,对仿真模型添加运动驱动。机械手的自由度为6,因此需要添加7组运动驱动,其中一组驱动用来控制末端执行器动作(习惯上机器人自由度分析时排除末端执行器,末端执行器自由度需要时可单独分析计算)。根据运动方案,运用STEP分段函数对机械手添加驱动(见表5)。
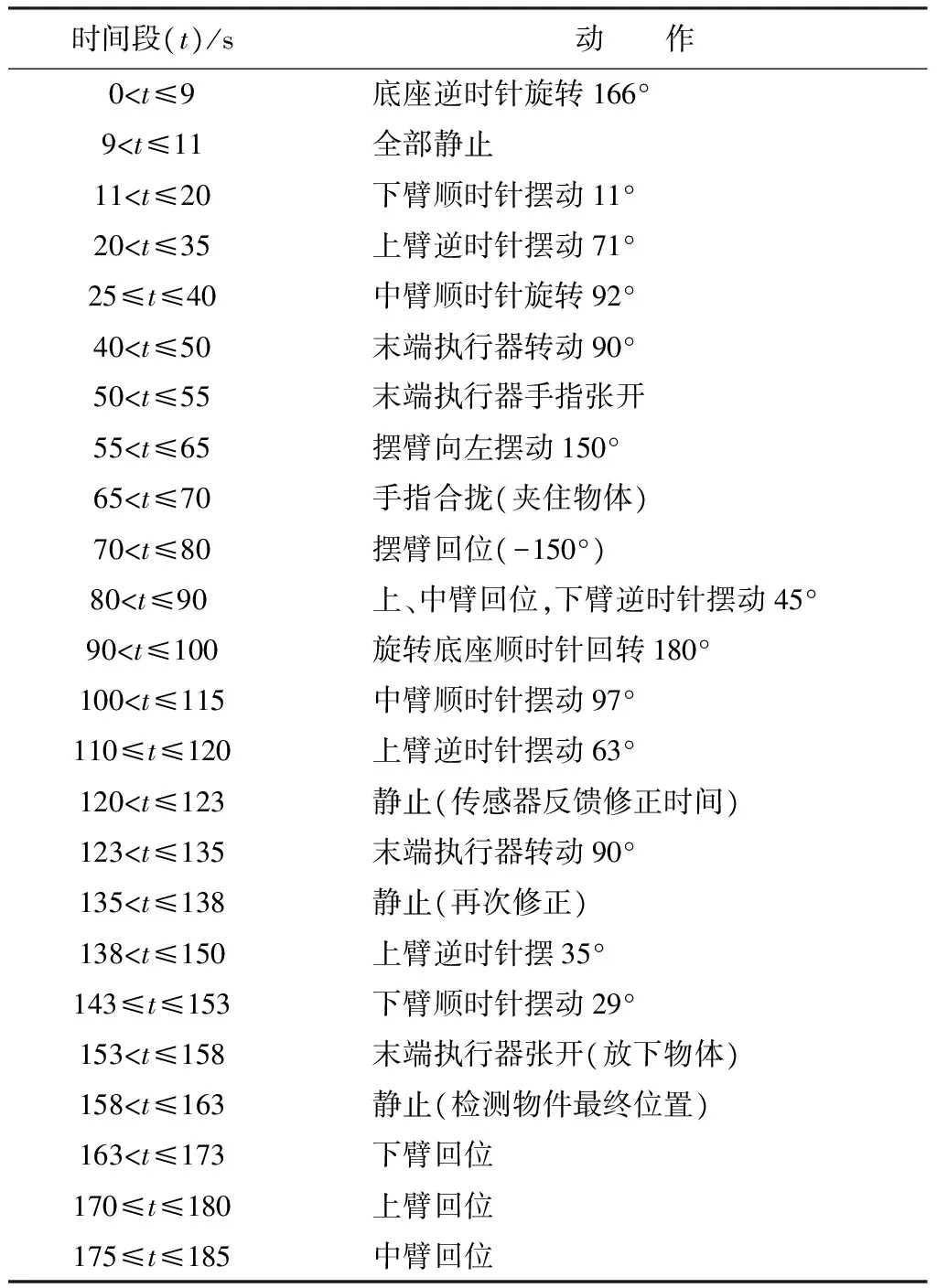
表4 运动方案
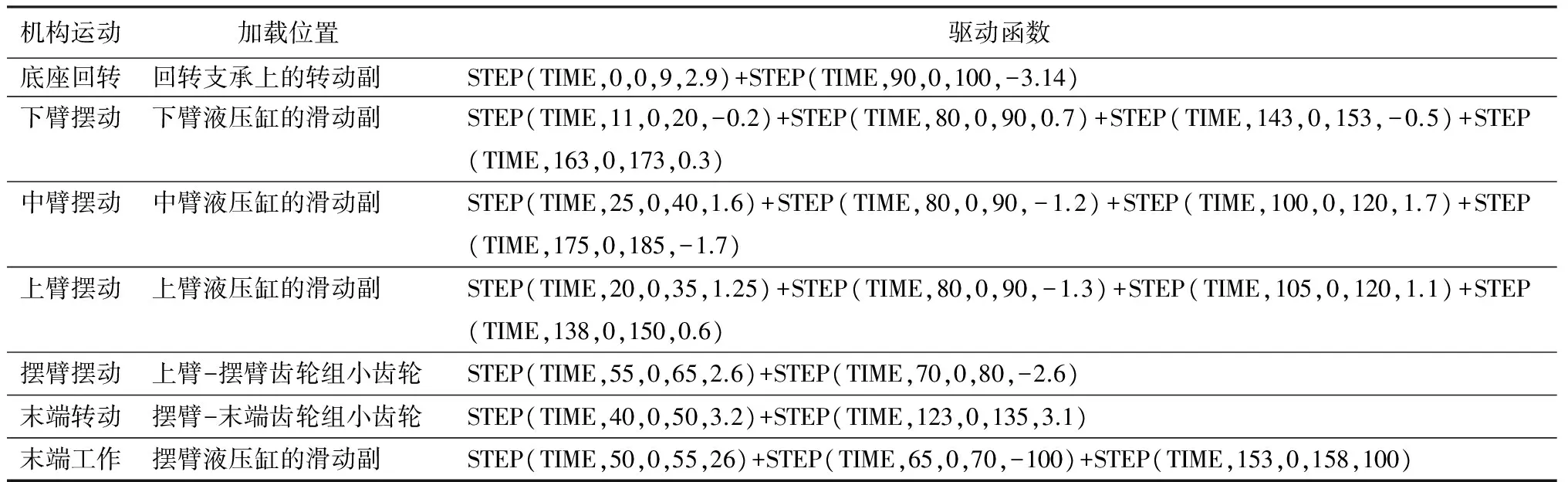
表5 运动驱动
设置运动仿真时间为185 s,步数18 500(实践证明,步数设置为时间的100倍以上时可获得较好精度),UG软件内嵌的ADAMS解算器对机械手仿真模型进行检查与解算。若检查与解算出错,则弹出错误信息对话框,可根据提示对模型进行相应调试;若无误,则可输出仿真结果[15-16]。依据表4运动方案进行仿真,机械手运动仿真实时动作截图如图3所示,机械手末端执行器实时运动参数(位移、速度、加速度)见图4~图6。
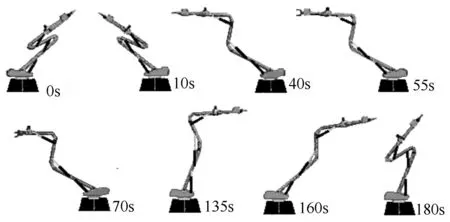
图3 运动仿真实时动作
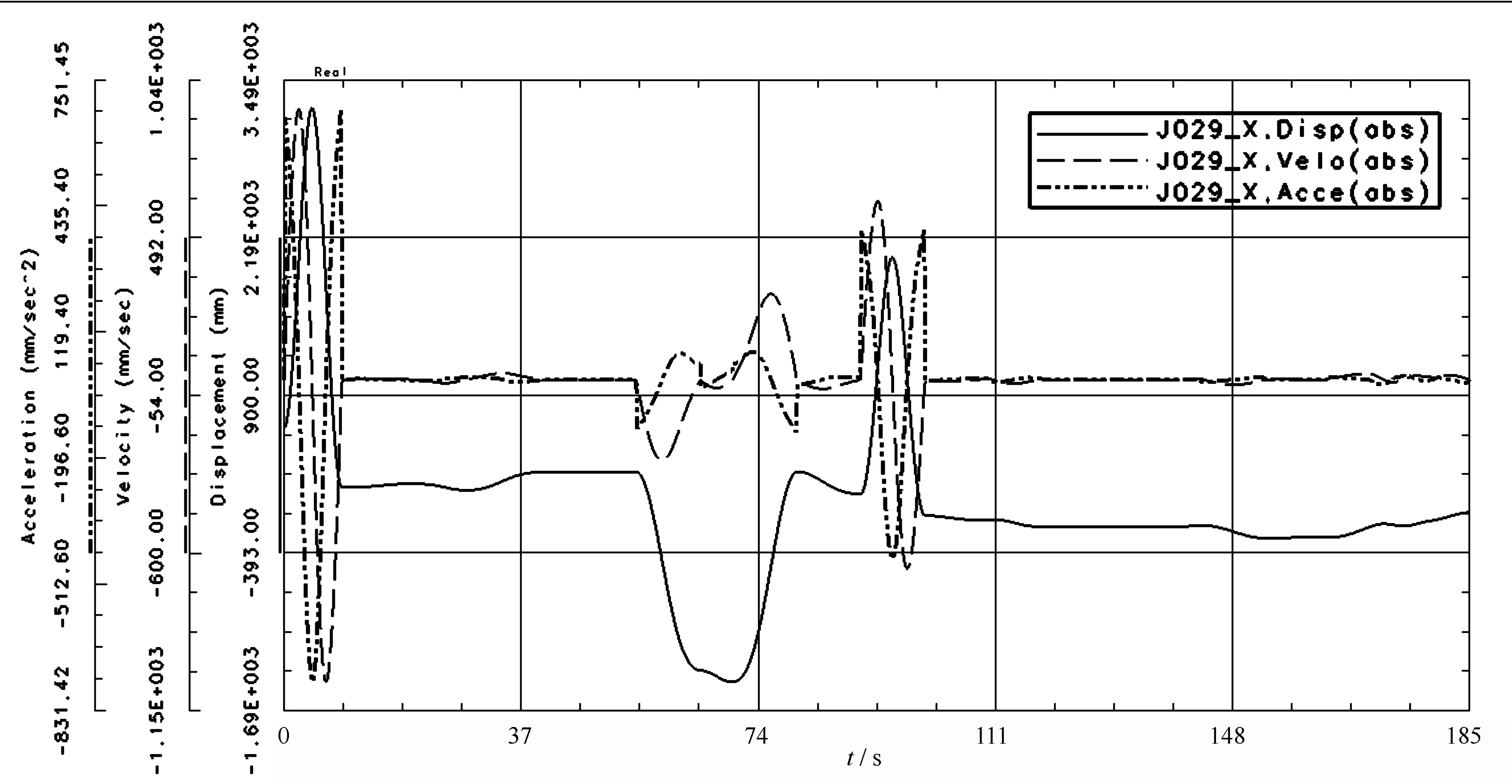
图4 机械手末端执行器位置位移、速度、加速度曲线(x轴分量)

图5 机械手末端执行器位置位移、速度、加速度曲线(y轴分量)
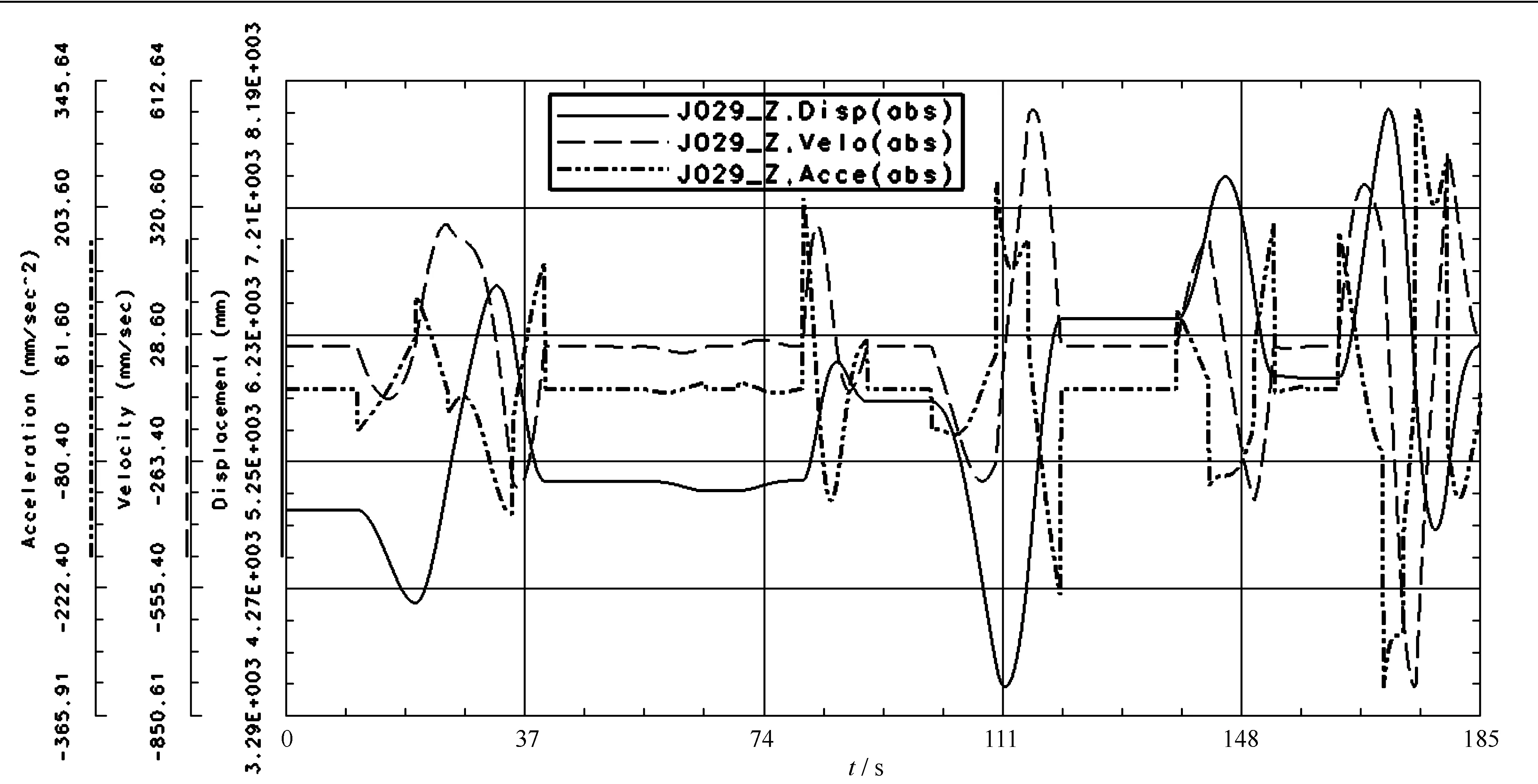
图6 机械手末端执行器位置位移、速度、加速度曲线(z轴分量)
4 结束语
ZY-06L型机械手的研制,目的是提高“木材表面强化与装饰自动化生产线”的生产效率、产品质量和自动化程度,提高企业效益。
通过建立机械手的运动学方程,得到了机械手末端执行器位姿与各关节变量之间的关系,分析机械手实际工作情况参数代入到运动方程求解,得到机械手3种工况下的各关节变量值。并通过虚拟仿真模拟机械手的工作流程,仿真结果显示:该机械手工作可达范围满足设计要求,末端执行器在初始位置(0 s)、物件初始位置(70 s)、物件目标位置(160 s)时的位姿与预期值相符,末端执行器速度与过载变化情况均在设计要求范围内。机械手运动方程建立与求解正确,运动动作合理,机械手机构方案可以满足设计要求。另外,仿真还可以得到机械手各关节的受载荷情况,可以作为机械手液压系统和控制系统设计的参考,也可以作为对各结构件进行有限元分析的依据。
[1] 蔡自兴.机器人学[M].2版.北京:清华大学出版社,2009.
[2] 祁鸿芳.基于微机控制的木材自动加工生产线[J].兰州工业高等专科学校学报,2006,13(4):32-35.
[3] 姜树海.林业机器人的发展现状[J].东北林业大学学报,2009,37(12):95-97.
[4] 罗继曼,赵民,关醒权,等.新型石材加工机械手构型原理探索[J].石材,2008(3):29-34.
[5] 宋景禄.BY120型原木选材液压机械手[J].林业机械,1991(6):6-9.
[6] 任洪娥,马岩,赵辉,等.弯曲木加工机器人进给量数控编程的数学方法[J].东北林业大学学报,2002,30(4):50-52.
[7] 丛宪冬,任希臣,靳凤林.弯曲木加工机器人柔性臂的控制策略研究[J].林业机械与木工设备,2003,31(5):7-9.
[8] 郭继峰,任洪娥,丛宪冬.弯曲木加工机器人模糊控制技术[J].东北林业大学学报,2004,32(2):35-36.
[9] 孙恒,陈作模.机械原理[M].北京:高等教育出版社,2006.
[10] 黄真,赵永生,赵铁石.高等空间机构学[M].北京:高等教育出版社,2005.
[11] 邓正隆,孙俊堂.机器人手臂运动方程推导方法的研究[J].自动化技术与应用,1987,6(1):45-49.
[12] 陈幼平,马志艳,袁楚明,等.六自由度机械手三维运动仿真研究[J].计算机应用研究,2006(6):205-207.
[13] 刘丽凤,李强,杜希强.基于UG和ADAMS的SG6-UT机械手三维实体动画仿真[J].机械工程师,2008(1):132-134.
[14] 宫赤坤,熊吉光,黄成林.Delta并联机器人运动学与动力学仿真分析[J].制造业自动化,2013,35(3):5-7,14.
[15] 王治博,任家骏,王传武.EBZ220TY掘进机回转台的运动仿真及应力分析[J].制造业自动化,2013,35(2):139-141.
[16] 余三成,张家梁,杨建国,等.基于ADAMS的汽车焊装夹具的运动仿真[J].制造技术与机床,2009(4):137-139.
Wood Surface Layer Strengthening and Decorative Automated Production Line ZY-06L-Type Manipulator Motion Analysis and Simulation/
Wu Hao, Wang Hongjun(Honghe University, Mengzi 661100, P. R. China)//
Journal of Northeast Forestry University.-2014,42(6).-137~142
Timber processing; Manipulator; Kinematics equations; Simulation analysis
吴昊,男,1985年9月生,红河学院工学院,讲师。E-mail:eagle.f22wh@163.com。
2013年11月25。
TS64
1) 云南省基础研究计划面上项目(2013FB062)。
责任编辑:张 玉。
