载波平滑伪距紧组合导航系统鲁棒自适应滤波算法
2014-08-02钟丽娜刘建业李荣冰
钟丽娜,刘建业,李荣冰,王 融
(1.南京航空航天大学 导航研究中心,南京 210016;2.南京航空航天大学 金城学院,南京 211156)
载波平滑伪距紧组合导航系统鲁棒自适应滤波算法
钟丽娜1,2,刘建业1,李荣冰1,王 融1
(1.南京航空航天大学 导航研究中心,南京 210016;2.南京航空航天大学 金城学院,南京 211156)
传统惯性/卫星紧组合导航系统采用载波相位平滑伪距可以有效提高伪距观测量精度,但平滑伪距后观测量噪声不符合白噪声特性而导致卡尔曼滤波器容易发散;同时由于周跳的存在会更加严重影响滤波器的稳定性。针对上述问题,分析了平滑伪距噪声特性并建立了噪声模型,在此基础上设计了鲁棒自适应滤波算法对观测噪声进行实时估计和补偿,结合抗差估计理论进行滤波以减小观测量噪声水平和模型不确定对滤波器带来的影响。理论分析和仿真结果表明,在复杂环境下,基于载波相位平滑伪距的鲁棒自适应紧组合导航系统定位精度提高了一倍以上。
平滑伪距;鲁棒自适应滤波;载波相位;紧组合
惯性/卫星紧组合导航系统具有较好的精度、动态性能及容错性,在航空航天、测绘等军民用领域获得了广泛应用[1-2]。随着导航性能需求的不断提升,如何在复杂环境、载体高动态等条件下获取更高定位精度已成为备受关注的问题[3]。紧组合导航系统一般采用卫星导航系统码伪距、伪距率(多普勒频移)作为观测量[4-5],其优点是组合方式简单易行。但由于码伪距观测噪声较大[6],所以这种组合方式导航定位精度相对较低。
载波相位平滑伪距算法是一种利用载波相位低噪声特性对码伪距进行平滑的算法,结合伪距与载波相位的优势,无需解算模糊度、无需参考站,能够有效降低码伪距噪声水平[7-8]。Hatch滤波是提出最早、应用最广泛的一种载波相位平滑伪距算法[9]。Teunissen提出最优迭代最小二乘平滑算法[10],但该算法对于非白噪声的情况是次优的;另有学者提出基于补充卡尔曼滤波、极大似然自适应卡尔曼滤波[11-12]等平滑算法。文献[8]将载波相位平滑伪距应用于紧组合导航系统,验证了其可行性与有效性。但该文献没有考虑伪距经过载波相位平滑后噪声特性发生变化的情况。紧组合导航系统卡尔曼滤波器参数的设定依赖先验噪声,而观测量伪距经过平滑后噪声水平发生明显变化,因此会导致滤波器出现较大误差而影响导航结果。尤其当外界环境发生变化,如信号受到遮挡、干扰,多路径效应、卫星高度角过低、或载体处于高动态机动等条件下,会引起载波相位周跳而导致平滑伪距观测噪声产生较大变化[8,14],从而导致伪距噪声频繁变化,严重影响紧组合导航系统系统的稳定和精度。
因此,不断在线估计和修正滤波器噪声统计特性,在周跳等外界干扰不确定的情况下实现鲁棒控制,从而提高惯性/卫星紧组合导航系统在复杂环境下的定位精度尤为重要。针对紧组合导航系统中伪距观测量经过载波相位平滑后,噪声水平发生变化而导致紧组合导航系统性能下降的问题,本文设计了一种跟踪平滑伪距噪声特性变化的鲁棒自适应卡尔曼滤波器,同时利用抗差估计使滤波器适应周跳产生的不确定性对平滑伪距产生的影响。
1 平滑伪距观测噪声特性建模
载波相位平滑伪距能够有效提高伪距观测量的精度,但同时也会导致噪声特性发生变化。本节对平滑后的伪距噪声特性进行了分析和建模,并推导出该噪声的时变方差,为系统实现滤波器中平滑伪距观测量噪声自适应建立基础。
利用Hatch滤波进行载波相位平滑伪距观测,其原理是用高精度的载波相位时间差分量对码伪距观测量进行平滑,从而获得更高测量精度的伪距值[15]。伪距和载波相位的测量分辨率主要由随机性的多路径误差和接收机噪声所决定。伪距的多路径误差可以达到1 m,而载波相位的多路径误差最大只有1 cm,伪距的测量分辨率是米级,而载波相位的测量分辨率可达到毫米级。因此可以通过载波相位对伪距进行平滑,实现降低码伪距噪声的目的。根据Hatch滤波:

考虑码伪距误差项和载波相位误差项,式(1)可以写为:



伪距噪声对比曲线如图1所示。其中码伪距噪声为白噪声,方差σρ为20 m,如图1(a)所示;载波相位等效伪距噪声也为白噪声,方差为0.1 m。经过平滑后的伪距噪声如图1(b)所示。可见平滑伪距噪声初始阶段明显较大,随时间增加逐渐减小,最终两者噪声水平相当,获得了较高精度的伪距观测量。这与式(4)推导的噪声特性相吻合,其噪声是迭代形式且与时间相关,其大小始终在3σ范围内,该结果验证了式(5)噪声方差模型的正确性。
除此以外,由于卫星接收信号受到遮挡、多路径效应等因素,载波相位中会产生周跳。周跳的存在会导致噪声变化具有更强的随机性以及产生较大的粗差,变化更加复杂。产生周跳后伪距观测量噪声变化曲线如图 1(c)所示。周跳产生对码伪距没有影响,但是对载波相位和相位平滑伪距都有很大影响,会产生较大的误差。由于其产生的时间、大小都具有随机性,因此导致观测量噪声产生随机性粗差。图 1(c)中可以看出,噪声大幅超出协方差曲线,会导致此时滤波器容易产生发散。

图1 平滑伪距前后噪声对比曲线Fig.1 Noise curve before and after smoothing pseudorange
由此可见,伪距经过载波相位平滑后,其噪声方差随时间变化。而惯性/卫星组合技术中的经典卡尔曼滤波器只能处理具备独立白噪声特性的噪声,且要求滤波器参数预先设定为与噪声水平相当。对采用平滑伪距的系统来说上述条件无法满足。因此虽然载波平滑伪距精度得到了提高,但惯性卫星紧组合导航系统只有设计和应用能够适应时变性观测噪声的滤波器,才能获得与高精度观测量对应的高精度导航性能,本文采用可以随噪声变化进行参数自适应调节、结合抗差估计理论适应模型不确定性的鲁棒自适应滤波算法来提高系统的精度和稳定性。
2 平滑伪距紧组合系统鲁棒自适应滤波算法
惯性/卫星紧组合导航系统卡尔曼滤波器的观测噪声参数是根据经验确定的固定先验值。由式(4)可以看出,对伪距观测量进行载波相位平滑以后,按照码伪距预设的原有噪声水平已经不符合现有噪声条件;尤其当外界环境发生变化,如信号受到遮挡、干扰,多路径效应、卫星高度角过低、或载体处于高动态机动等条件下,都会引起载波相位周跳而导致平滑伪距观测噪声产生不确定性变化。抗差卡尔曼滤波对噪声的不确定性具有很好的鲁棒性,本文在已推导的平滑伪距噪声特性基础上,结合抗差卡尔曼滤波提出了平滑伪距紧组合系统鲁棒自适应滤波算法。
2.1 基于抗差估计的卡尔曼滤波
在惯性/GNSS紧组合导航系统中,惯性导航系统是整个组合导航系统的基本参考系统,组合导航系统是以惯导的误差方程为主状态方程,同时按IMU和卫星导航系统接收机时钟误差的噪声特性进行状态扩充。导航坐标系选为东北天地理坐标系,紧组合系统状态方程为[15]:

系统观测量由根据惯性系统输出的导航参数推算出的伪距、伪距率,与GNSS接收机输出的伪距、伪距率求差得到,系统观测方程为:

式中,Z为观测量,由伪距、伪距率观测量构成;H为观测矩阵,由可见星到接收机的方向余弦与ECEF-东北天坐标转换矩阵相乘得到;V为观测噪声矩阵,由伪距、伪距率观测噪声构成。
当接收机产生周跳后,其作用相当于载波相位观测量产生跳变,会导致系统滤波器精度变差甚至不稳定。对于采用载波相位平滑伪距作为观测量的组合导航系统,其性能直接受到周跳的影响。由于周跳的发生具有很强的不确定性,因此组合导航系统滤波算法的鲁棒性尤为重要。抗差Kalman滤波能够很好地抵抗粗差的影响,并且能快捷、准确、有效地对数据进行处理。抗差的原理主要是根据稳健估计,选择合适的抗差权函数对滤波器参数进行调节,实现在实际模型与预先设定模型出现较大偏差时估值不受到破坏性影响的目标。抗差卡尔曼滤波递推方程为:


式中,Vk为状态量残差,为k时刻下第i个观测量的方差值,常规方法是采用卡尔曼滤波器预先设定值计算。c为常量,一般取为1.5~2.5。
抗差卡尔曼滤波对观测量中的粗差具有较好的鲁棒性。当周跳发生时,抗差卡尔曼滤波状态量残差大小和调节系数对R阵进行调节,即调整观测量在滤波器中的权重,从而对周跳引起的粗差具有鲁棒性,减小粗差影响。
2.2 自适应抗差卡尔曼滤波算法
尽管采用抗差估计能够抑制周跳的影响,但是对采用载波相位平滑伪距的组合导航系统而言,发生周跳后平滑伪距的过程就会中断,恢复正常后需要重新开始平滑。根据第二节中的分析,载波相位平滑伪距初始阶段具有较强的非高斯特性,容易引起滤波器精度下降。为了降低其影响,在分析了平滑伪距噪声特性的基础上,根据噪声特性进行自适应抗差参数调节,可以提高滤波器的精度和稳定性。
式(9)所示协方差模型能够准确反映载波相位平滑伪距以后观测量的噪声方差特性,将其用于计算等价权观测噪声协方差矩阵可以实现自适应标准化,即

其中,抗差权因子由平滑伪距噪声模型自适应得到:
进行载波相位平滑伪距的初始阶段,该方法可以快速自适应观测噪声变化,因此降低噪声特性非高斯的影响;在平滑稳定阶段,该方法效果与普通卡尔曼滤波相同。发生周跳并重新开始平滑后,同样可以快速跟随噪声特性,从而提高滤波器的稳定性。
将自适应权因子代入式(16)可以得到跟随噪声变化的自适应观测噪声方差,按照式(8)~(12)的卡尔曼滤波流程进行计算,实现载波相位平滑伪距组合导航系统的自适应滤波方程。该方法能够跟随平滑伪距噪声变化,并在发生周跳的情况下进行抗差处理,进而提高系统稳定性和精度。
3 仿真验证与分析
为验证基于载波相位平滑伪距的鲁棒自适应惯性/卫星紧组合导航系统性能,进行了仿真试验和分析。仿真采用动态航迹,有爬升、巡航、急转等机动,可见星数随时间变化,捷联解算时间为0.02 s,仿真时间2000 s,平滑间隔为1 s。采用中等精度惯导,卫星导航中码伪距噪声误差为20 m,载波相位精度为0.5 m。本仿真用于载波相位平滑伪距对紧组合系统定位精度提升性能的验证和分析。利用Hatch滤波,对伪距进行了平滑后进行紧组合导航仿真。
3.1 平滑伪距自适应特性仿真
通过式(5)噪声方差特性模型,可以对平滑伪距后的噪声特性实现自适应,以次为基础调节滤波器中观测噪声阵,可以避免卡尔曼滤波器预设参数与实际不符而造成的误差。观测噪声方差自适应前后的紧组合系统导航定位误差如图2所示。
图2(a)为各伪距观测噪声特性曲线。可以看出,在无钟差漂移(实际中钟差漂移可以被修正掉)和不发生周跳的前提下,平滑后的伪距噪声水平明显下降;在平滑刚开始的阶段,噪声有一定波动;随着平滑时间的增加,噪声水平越来越稳定,逐渐接近于载波相位的噪声水平。这一现象与Hatch滤波理论相符合,当平滑历元趋于无穷时,平滑伪距误差与载波相位误差相同。
从图2(b)为采用方差自适应滤波前后紧组合导航定位精度的对比结果。其中KF表示未经方差自适应的普通卡尔曼滤波,AKF表示自适应卡尔曼滤波。可以看出,平滑伪距作为紧组合导航系统观测量以后,卡尔曼滤波器如果仍采用原有观测噪声参数,则其定位精度平滑后的紧组合定位误差噪声水平下降很多,精度提高很明显。特别注意的是,在这两组仿真中,卡尔曼滤波器的观测噪声必须按照平滑前后相应的噪声水平设置,才会有较为显著的效果;如果平滑后不修改观测噪声参数,定位结果并无明显提高。这与卡尔曼滤波理论要求有准确的噪声统计特性相符。

图2 紧组合系统自适应滤波分析Fig.2 Analysis of tightly-coupled navigation system based on adaptive filtering
平滑伪距前后紧组合导航定位误差 RMS值对比如表1所示。由导航结果可知,经过载波相位平滑伪距以后,定位精度可提高50%以上。
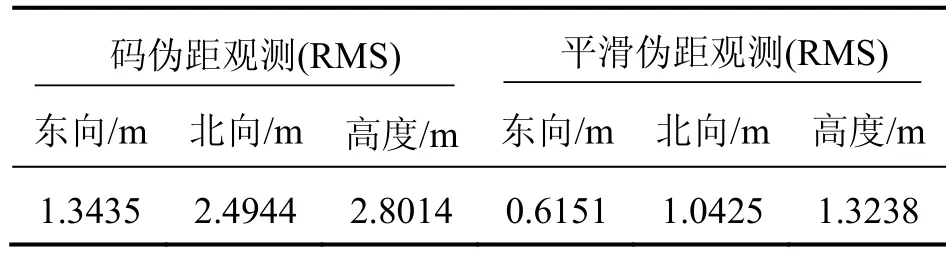
表1 码伪距和平滑伪距为观测量时组合导航误差RMS值Tab.1 RMS of positioning error based on code pseudorange and smoothing pseudorange
3.2 平滑伪距鲁棒自适应滤波系统仿真
周跳是载波相位应用中存在的重要问题之一。在产生周跳的情况下,分别对基于卡尔曼滤波和所提出的鲁棒自适应滤波应用于紧组合系统进行了仿真和分析。仿真结果如图3所示。

图3 紧组合系统鲁棒自适应滤波分析Fig.3 Analysis of tightly-coupled navigation system based on robust adaptive filtering
图3(a)为发生载波相位发生周跳后,伪距观测量的变化情况。由图可知,在1000 s时刻载波相位发生周跳,导致平滑伪距在相应时刻产生粗差,可知周跳对平滑伪距噪声影响严重。当周跳发生频繁的时候,伪距观测噪声不但不符合高斯白噪声,且噪声变化不确定性更强。由于周跳的不可预见和随机性,伪距观测噪声的统计特性无法确定,从而导致标准卡尔曼滤波器精度变差,严重时甚至会产生发散。
图3(b)为发生周跳后,分别采用卡尔曼滤波(KF)和鲁棒自适应滤波(RAKF)进行紧组合导航的定位误差对比。首先在导航初期,平滑伪距刚开始阶段,由于有色噪声特性较为明显,卡尔曼滤波呈现较大误差。而鲁棒自适应滤波则具有较好的适应性,导航精度保持稳定。其次,在发生周跳时,KF定位结果有较大的跳变,而RAKF定位精度要明显好于卡尔曼滤波,且收敛速度高于KF。这是由于RAKF能够自适应噪声水平的变化来调整观测噪声,并通过抗差对周跳产生的粗差进行了滤波器参数调节而提高导航性能。
发生周跳后采用不同滤波方法紧组合导航定位误差RMS值对比如表2所示。尽管发生周跳,但由于载波相位平滑伪距的作用,使用卡尔曼滤波器定位精度仍然较好;相比之下,应用鲁棒自适应滤波可以更加稳定,接近于无周跳的导航定位精度。当然,周跳的幅度、持续时间都是影响最终定位精度的因素。
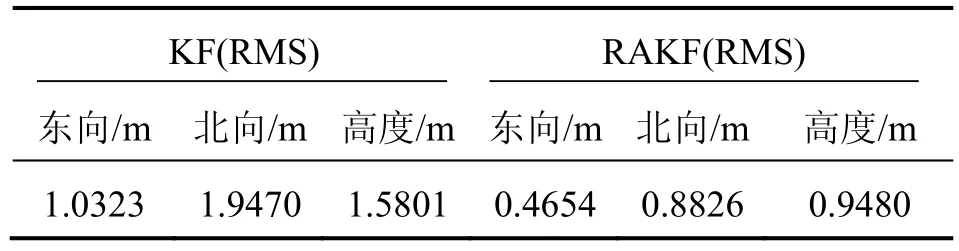
表2 采用KF和RAKF的紧组合导航定位RMS值Tab.2 RMS of positioning error based on KF and RAKF
4 结 论
针对传统采用码伪距为观测量的紧组合导航系统精度较低的问题,提出了载波相位平滑伪距与自适应抗差卡尔曼滤波相结合的方法,以提高导航定位精度。其中,载波相位平滑伪距用以降低观测量的噪声水平;由于载波相位存在易产生周跳的问题,会导致观测量噪声水平变化较大,甚至不符合白噪声的条件,因此采用观测噪声自适应的抗差卡尔曼滤波,提高周跳等复杂条件下以载波相位平滑伪距为观测量的紧组合导航系统的定位精度。仿真结果表明,采用载波相位平滑伪距结合自适应抗差卡尔曼滤波,可以有效提高紧组合导航系统的定位精度,在出现一次周跳的情况下,定位精度可以提高60%以上。
(References):
[1]Miller I,Campbell M.Sensitivity analysis of a tightlycoupled GPS/INS system for autonomous navigation[J].IEEE Transactions on Aerospace and Electronic Systems,2012,48(2): 1115-1135.
[2]Schmidt G.Inertial navigation & GPS lectures[J].Aerospace and Electronic Systems Magazine,2011,26(4):41-41.
[3]Soloviev A.Tight coupling of GPS and INS for urban navigation,aerospace and electronic systems[J].IEEE Transactions,2010,46(4): 1731-1746.
[4]Xiong Z,Chen J,Wang R,et al.A new dynamic vector formed information sharing algorithm in federated filter[J].Aerospace Science and Technology,2013,29(1): 37-46.
[5]Chiang K W,Duong T T,Liao J K,et al.On-line smoothing for an integrated navigation system with low-cost MEMS inertial sensors[J].Sensors,2012,12(12):17372-17389.
[6]王秀森,周红进,张尚悦.基于GPS伪距单差的舰船相对导航方法[J].中国惯性技术学报,2012,20(4):464-467.WANG Xiu-sen,ZHOU Hong-jin,ZHANG Shang-yue.Relative navigation between vessels based on GPS single difference[J].Journal of Chinese Inertial Technology,2012,20(4): 464-467.
[7]Dickman J,Bartone C.Smoothing GPS carrier phase double differences using inertial measurements for high performance applications[J].GPS Solutions,2008,12:119-133.
[8]吴富梅,唐颖哲.基于载波相位平滑伪距技术的GPS/INS组合导航[J].大地测量与地球动力学,2010,30(1):130-135.WU Fu-mei,TANG Ying-zhe.GPS/INS integrated navigation basedon phase smoothing pserdorange[J].Journal of Geodesy and Geodynamics,2010,30(1): 130-135.
[9]Dutt V B S S I,Gowsuddin S.Ionospheric delay estimation using Klobuchar algorithm forsingle frequency GPS receivers[J].International Journal of Advanced Research in Electronics and Communication Engineering,2013,2(2): 202-207.
[10]Le A Q,Teunissen P J G.Optimal recursive least-sqiares filtering of GPS pseudorange measurements[C]//International Association of Geodesy Symposia.2008,Vol.132,Part II: 166-172.
[11]宫晓琳,张蓉,房建成.固定区间平滑算法及其在组合导航系统中的应用[J].中国惯性技术学报,2012,20(6):687-693.GONG Xiao-lin,ZHANG Rong,FANG Jian-cheng.Fixed-interval smoother and its applications in integrated navigation system[J].Journal of Chinese Inertial Technology,2012,20(6): 687-693.
[12]Yang Y,Gao W,Zhang X.Robust Kalman filtering with constraints: a case study for integrated navigation[J].Journal of Geodesy,2010,84(6): 373-381.
[13]Bahrami M,Ziebart M.Instantaneous Doppler-aided RTK positioning with single frequency receivers[C]//IEEE/ION Position Location and Navigation Symposium.Indian Wells,CA,USA,2010: 70-78.
[14]韩松来.GPS和捷联惯导组合导航新方法及系统误差补偿方案研究,博士论文[D].国防科学技术大学,2010.HAN S L.Novel GPS/SINS integration architechture and systematic error compensation methods[D].Changsha:National University of Defense Technology,2010.
[15]李荣冰,于永军,刘建业,等.大气辅助的 SINS/GPS组合导航系统研究[J].仪器仪表学报,2012,33(9):1961-1966.LI Rong-bing,YU Yong-jun,LIU Jian-ye,et al.Research on SINS /GPS integrated navigation system with air data system[J].Chinese Journal of Scientific Instrument,2012,33(9): 1961-1966.
Adaptive robust filtering algorithm for tightly-coupled integrated navigation system based on carrier phase smoothing pseudorange
ZHONG Li-na1,2,LIU Jian-ye1,LI Rong-bing1,WANG Rong1
(1.Navigation Research Center,Nanjing University of Aeronautics and Astronautics,Nanjing 210016,China;2.Jincheng College,Nanjing University of Aeronautics and Astronautics,Nanjing 211156,China)
Based on the phase smoothing pseudorange theory,the measuring accuracy of INS/GNSS tightly-coupled integrated navigation system can be significantly improved.However,the observation noise of smoothed pesudorange doesn’t meet the requirement of white noise in Kalman filter,which could lead to filter divergency.Meanwhile,the stability of Kalman filter could be seriously affected due to the existence of cycle slip.In order to resolve the above problems,this paper presents a new robust adaptive filter.First,the noise characteristic model is built for estimating and compensating measurement noise; then the robust estimation theory is applied based on the noise model to reduce the influence of non-Gaussian measurement noise and model uncertainty.Theoretical analysis and simulation results show that the adaptive INS/GNSS tightly-coupled integrated navigation system based on carrier phase smoothing code pesudorange provides higher accuracy,better dynamic performance than traditional tightly-coupled system under complex environment.The proposed method has improved the accuracy by more than 100%.
smoothed pseudorange; robust adaptive filter; carrier phase; tightly-coupled
V249.3
:A
1005-6734(2014)02-0205-06
10.13695/j.cnki.12-1222/o3.2014.02.012
2013-11-18;
:2014-03-06
国家自然科学基金重大研究计划项目(61374115,91016019,61273057);江苏高校优势学科建设工程资助项目资助
钟丽娜(1981—),女,博士研究生,从事组合导航系统与完好性的研究。E-mail:zhonglina@nuaa.edu.cn
联 系 人:刘建业(1957—),男,教授,博士生导师。E-mail:ljyac@nuaa.edu.cn
