基于NiosⅡ的导航计算系统设计
2014-08-02杨瑞
杨 瑞
(内蒙古集宁师范学院,内蒙古 乌兰察布 012000)
基于NiosⅡ的导航计算系统设计
杨 瑞
(内蒙古集宁师范学院,内蒙古 乌兰察布 012000)
使用陀螺仪的惯性导航系统具有非常高的精度,但是成本非常高昂,无陀螺捷联惯性导航系统通过对多个加速度计的数值进行解算也可以实现导航的目的,同时成本远低于使用陀螺仪的惯性导航系统。本文提出了一种基于Nios II 的导航计算系统设计,通过将9个加速度计直接安装在载体上,然后通过FPGA进行计算,最终实现导航的目的,系统具有准确性高、成本低等优点。
导航;FPGA;MEMS;加速度计
0 引 言
导航是指将物体从一个地方引导到另外一个地方。对于舰船的正常航行而言,导航系统的重要性不言而喻。为了获取导航信息,需要获得舰船的实时速度、位置以及姿态等。导航技术经过了几十年的发展,已经发展成为一种较为成熟的技术。惯性导航是最为重要的导航技术之一,它是根据牛顿的惯性原理,通过使用加速度计或者陀螺仪等来获得载体的角运动参数和线运动参数,通过给定的初始状态参数来获取载体的导航参数。惯性导航系统由于不需要向外辐射能量,因而具有非常高的隐蔽性,在现代舰船导航系统中占据了非常重要的地位。同时由于其不依赖外界信息,因而是一种自主式导航系统[1-2]。
导航计算机系统的发展是随着计算机技术的不断进步而不断发展。最初导航计算机系统受限于电子元器件及相关技术的限制,体积一般都非常庞大,同时性能参数也非常低。进入21世纪以后,计算机技术得到迅速发展,嵌入式系统在舰船信息处理、舰船消防等领域得到了广泛的应用。目前最为流行的计算机导航系统的设计方案是使用DSP+MCU的方式来构建,其优点在于对于数据的处理能力非常强,但是DSP外围的电路设计较为复杂[3-4]。
本文在前人研究的基础上提出了一种基于Nios II的导航计算系统设计方案,充分使用FPGA内部硬件资源,使得大部分功能都能在FPGA内部实现,因而可以极大地降低导航系统的体积和成本,同时也降低了硬件设计的难度。系统主要包括了数据采集模块和数据解算模块,设计的实验样机可以满足导航计算的基本要求。
1 工作原理
1.1 基本原理
最初的惯性导航系统中一般都安装了陀螺仪,并且一般都会使用6个惯性敏感元件来对导航参数进行测量和计算。在最初的惯性导航系统中,陀螺仪主要用来测量载体绕质心转动的相关数据信息,而加速度计则用来测量载体质心平动的相关信息。研究者通过不断地研究发现,加速度计在测量载体质心平动信息时,还可以测量出角速度信息,而角速度信息则可以用来提取陀螺仪测量的数据信息,因而陀螺仪可以使用3个加速度计来代替,在此基础上,有研究者提出了一种使用6个加速度计的导航计算系统方案,这就是无陀螺捷联惯导系统的理论基础。
在无陀螺捷联惯导系统中一般都会使用6个以上的加速度计,这些加速度计所测量的信息包括了载体沿俯仰、横滚、偏航轴的转动加速度以及角速度信息,通过对这些信息进行汇总和计算,就可以得到惯性坐标系和舰船坐标系之间的方向余弦矩阵,通过使用计算机或者嵌入式系统对这个余弦矩阵进行求解,就可以得到舰船在地理坐标系中的加速度分量[5]。
参考载体初始对准的结果或在空中由其他信号源提供的初始条件,可以得到地理坐标系相对惯性坐标系的旋转角速度,然后对其积分就可以得到速度分量,再积分就可以得到舰船当前位置的高度以及经纬度。
1.2 坐标系
根据前述惯性导航系统的工作原理,可以发现,在整个导航过程中,由于其基本原理以牛顿力学为基础,因而需要选取合适的坐标系。坐标系的选取会直接影响最终惯性导航系统的精度和准确度。本文主要介绍导航坐标系以及载体坐标系的建立。
根据导航系统在实际工作时的需要而选取的一种坐标系称之为导航坐标系。在无陀螺导航系统中,其力学方程同有陀螺导航系统中完全一致,只是在无陀螺导航系统中需要对角速度进行计算,因而在导航坐标系的选择上基本同有陀螺导航系统相一致。导航坐标系可以获取载体相对于地球的地理位置和相对于地理坐标系的方位及水平姿态角。图1为导航坐标系示意图。

图1 导航坐标系Fig.1 The navigation system
图1中参数的意义如下:
λ为经度,(°);R为地球半径,m;α为游动自由方位角,(°);φ为纬度,(°)。
除了导航坐标系外,还需要确定载体坐标系。由于舰船在航行过程中经常会出现晃动或者偏离,因而必须要使用一个能够同载体相联系的坐标系。因而,舰船坐标系就是以舰船的质心作为坐标系的原点,如图2所示,并且进行如下定义:
方位角H:首向基准线同北向基准线的夹角,这里的首向规定为载体纵轴的轴向在水平面内的投影方向;
纵摇角ψ:水平面和载体纵轴之间的夹角;
横摇角θ:载体横轴与水平面之间的夹角。

图2 载体坐标系Fig.2 Carrier coordinate system
在建立了坐标系的基础上,本文使用9个加速度计来进行导航信息的计算,图3为9个加速度计的配置方式。在这个方案中,利用沿坐标轴放置的1,4,7直接测量得到载体的线加速度,利用其余加速度计的测量值可解算出载体的角加速度,以及角速度的乘积项。使用这种方法来进行计算相对简单。

图3 加速度计配置Fig.3 The accelerometer allocation
2 系统设计
2.1 系统整体设计
在本文所提出的导航系统设计中使用了9个加速度计传感器,用于测量各个方向上的加速度或角速度。这些加速度计输出的是模拟量,因而需要将这些模拟信号转化后再输入到FPGA中才能进行解算。而在舰船航行的复杂环境中,导航系统中各加速度计有可能受到各种各样的信号干扰,因而需要在进行A/D转换前对信号进行一定的处理,以去除高频噪声以及其他噪声。图4是基于Nios II的导航计算系统硬件框图。在加速度计采集到加速度或者角速度信息后,使用低通滤波和减法电路来对电路进行处理,然后使用A/D芯片进行A/D转换,将这些数据存储到存储器中后再输入到FPGA中,最后由FPGA对这些获取的加速度及角速度信息根据前述原理进行求解,并且将最终得到的结果进行显示。

图4 系统硬件结构框图Fig.4 The diagram for system hardware structure
2.2 详细设计
在整个导航计算系统设计中,后续对于数据的处理都基于9个加速度计输出的测量数据准确的基础上进行,因而数据采集电路必须要具有一定的精度。在本系统中,使用9个MEMS惯性加速度计。MEMS惯性加速度计具有功耗低、重量轻和体积小的优点,其中,电容式硅微加速度计更是其中的佼佼者。考虑到最终系统的成本问题,本文使用Model 1221型,它是由Silicon Designs公司生产的单轴MEMS加速度计,其量程为±2 g,最小分辨率为10-4g。
MEMS惯性加速度计输出的是模拟信号,这些模拟信号无法被FPGA所识别,因而需要使用AD转换芯片将这些信号转换成数字信号。同时考虑到本系统中需要同时对9个加速度计信号进行转换,为简化电路设计,在AD转换芯片的选择上选择多通道AD转换芯片。AD7656是美国模拟器件公司生产的一款AD转换芯片,可以同时实现六路模拟信号的转换,因而在电路设计中使用2片AD7656皆可完成设计要求。AD7656的外围电路如图5所示。
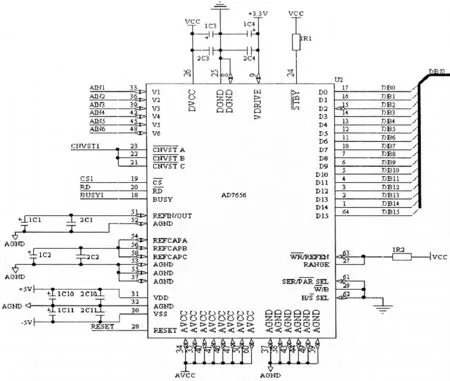
图5 AD7656外围电路Fig.5 Peripheral circuit of AD7656
在完成基本的外围数据采集电路设计后,需要对软件进行设计。System on a programmable chip,即SOPC是一种以FPGA为硬件基础的特殊嵌入式系统,通过单个芯片的作用实现整个系统的逻辑处理的功能。Nios II处理器是基于SOPC技术的32位RISC处理器软内核。通过Nios II IDE、Quartus II和SOPC Builder等开发工具可以完成导航系统的开发工作。
SOPC主要由Nios II处理器、标准外设、存储器接口以及用户自定义的一些外设等部分组成。SOPC Builder可以在软件中将这些模块进行有机组合,从而形成一个整体的系统模块,并且可以自动生成总线逻辑。
根据微控制器架构进行系统软核的构建。在SOPC Builder中,设置系统时钟为50 MHz,这样就可以完全满足系统前期的设计需求。选择标准型Nios Ⅱ/s,然后定制 Nios II微控制器软核,加入Nios II处理器内核、SDRAM、JTAG UART等模块,最好配置好锁相环,这样就完成了SOPC的基本设计工作。最后可以在Nios II IDE中完成导航信息的计算工作。
2.3 系统测试
在静态下对9个加速度计进行采样测试,在一定时间内对9个通道进行连续采样100次,在数据处理上剔除10个最大值和最小值,以防止出现粗大误差,然后将剩余的90个数值求平均值和标准差,得到如表1所示的数据。从表1可以看出,数据测试比较稳定,标准差非常小,因而可以看出系统具有较高的精度。

表1 测试结果
改变测试条件,将载体进行移动,观察到9个加速度计的测量数据有明显变化。在同一地点,改变测试时间,测量所得到的结果没有明显变化。
3 结 语
惯性导航系统对于保证舰船的正常航行非常重要。本文提出一种基于Nios II的导航计算系统设计方案,充分使用FPGA内部硬件资源,极大地降低导航系统的体积和成本,也降低了硬件设计的难度,通过测试发现设计的导航系统可以完成导航信息的计算工作,准确性较高。
[1] 刘冬利,庞海滨,戴耀.北斗卫星导航系统在舰艇上的扩展应用[J].舰船科学技术,2014,36(4):93-96.
LIU Dong-li,PANG Hai-bin,DAI Yao.Study of expanding application of Beidou navigation satellite system to naval ships[J].Ship Science and Technology,2014,36(4):93-96.
[2] 周红进,钟云海,易成涛.MEMS惯性导航传感器[J].舰船科学技术,2014,36(1):115-121.
ZHOU Hong-jin,ZHONG Yun-hai,YI Cheng-tao.MEMS inertial navigation sensors[J].Ship Science and Technology,2014,36(1):115-121.
[3] 张树侠,孙静.捷联式惯性导航系统[M].北京:国防工业出版社.
[4] 梁谷.基于MEMS的捷联惯导系统的研究[D].哈尔滨:哈尔滨工程大学,2008.
[5] 郝宏伟,马铁华,范锦彪.无陀螺微观性测量组合电路设计[J].电子测量技术,2009,32(1):43-45.
HAO Hong-wei,MA Tie-hua,FAN Jin-biao.Design of non-gyro micro inertial measurement unit circuit[J].Electronic Measurement Technology,2009,32(1):43-45
The design of navigation system based on Nios II
YANG Rui
(Department of Computer of Jining Teacher′s College,Wulanchabu 012000,China)
Using gyroscope inertial navigation system has very high accuracy, but the cost is very high, no gyro strapdown inertial navigation system based on a number of accelerometer numerical calculating can also achieve the purpose of the navigation, and the cost is much lower than using gyroscope inertial navigation system. This paper proposes a use navigation system design based on Nios II, through the nine accelerometers installed directly on the carrier, and then by the FPGA, ultimately achieve the purpose of navigation, system has advantages of high accuracy, low cost.
navigation;FPGA;MEMS;the accelerometer
2014-07-18;
2014-10-20
内蒙古自治区教育厅资助项目(NJZZ11285)
杨瑞(1980-),女,硕士,讲师,研究方向为计算机软件理论、操作系统。
TP393
A
1672-7649(2014)12-0132-04
10.3404/j.issn.1672-7649.2014.12.030
