基于TM影像的宁波市不透水面变化研究
2014-08-01王丽云李艳周阳
王丽云,李艳,周阳
(1.南京大学 国际地球系统科学研究所,南京 210046;2.南京大学 地理信息科学系,南京 210023;3.江苏省地理信息技术重点实验室,南京 210046)
1 引 言
城市化是20世纪以来最为显著的人类活动过程,其显著特征之一是不透水面不断增加,各种不透水面是城市的基质景观,主导城市景观格局与变化过程,是城市地表覆被的典型特征[1-2]。不透水面是一种水不能通过它下渗到土壤中的人工地貌特征,包括城市中的公路、车道、人行道、停车场、建筑屋顶等。从遥感角度来理解,通常指相对于植被和土壤渗透率较小的建筑区域[3]。城市中不透水面的变化是衡量城市发展的重要指标之一,它常常用来监测城市中环境状况的变化以及城市人与自然的和谐状况,特别是对城市热环境的变化产生重要影响[4]。采用遥感技术提取的不透水面信息,为科学掌握城市化脚步提供了客观数据。
自20世纪后期通过遥感技术进行不透水面提取的研究就开始引起关注,而国内类似的研究才刚刚起步,岳文泽利用ETM+影像,通过线性光谱分解技术提取了上海市的不透水面并对其空间分布特征进行了分析[5]。王天星以ASTER为数据源提取不透水面密度,并分析了不透水面与地表温度及植被指数的定量关系[6]。徐涵秋采用复合波段的形式创建了归一化差值不透水面指数[7]。本文在前人研究成果的基础上,运用基于LBV变换的决策树分类法与NDBI(归一化建筑指数)、第3波段提取相结合的方法对研究区不透水面进行提取,并对提取结果进行了变化检测分析。
2 研究区概况及数据源
本文研究对象为浙江省宁波市。宁波市是浙江三大经济中心之一,经济发展迅速,特别是自沿海开放战略实施以来,土地覆盖类型发生了巨大的变化,土地利用呈现明显的开发特征,导致不透水面显著变化。
用于不透水面提取的数据源分别为研究区2000年6月14日、2005年6月23日和2010年7月17日3个时相,空间分辨率为30m的Landsat TM遥感影像,无云条件下成像,影像质量较好。
3 研究方法
在对3个时相的原始遥感影像进行几何纠正,大气校正,影像拼接等一系列的预处理[9]后,利用基于LBV变换的方法对研究区不透水面进行提取。通过比较不同时相的不透水面分布,检测研究区不透水面的变化情况。
3.1 LBV变换原理
L=1.441247*D2-0.090419*D3-1.367302*D4+1.794034*D5+12.000000
B=1.126971*D2+0.673348*D3+0.077966*D4-0.878287*D5+159.000000
V=1.636910*D2-3.396809*D3+1.915944*D4-0.156048*D5+121.000000
(1)
式中,D是灰度值(gray level value)或数码值(digital count)。下标中的数字为图像波段号[13]。

图1 LBV变换原理图
3.2 变化检测
在LBV变换的基础上,从3期遥感影像中提取不透水面,形成3幅不透水面图像,并将其二值化,其中不透水面类型的像素值为1,其他非不透水面类型像素值为0。然后,将3期不透水面二值化图像根据式(2)叠合计算,得到一幅不透水面变化图像。

(2)
根据式(2),叠合生成的不透水面变化图像的像素值有0~7共8种不同的值。这8种不同的值分别对应叠合前3幅图像中不透水面与非不透水面的分布情况,具体对应关系如表(1)所示。表中,在3幅不透水面图像中,0值表示该像素在某年份为非不透水面类型,1值表示该像素在某年份为不透水面。例如,在不透水面变化图中某位置的像素值为5,则表示叠合前的3幅不透水面图像中该像素在2000年和2010年为不透水面(像素值为1),2005年为非不透水面(像素值为0)。通过计算不透水面变化图中8种像素值的个数,可统计2000年、2005年和2010年不透水面总体分布以及2000年~2005年,2005年~2010年间不透水面的变化情况。
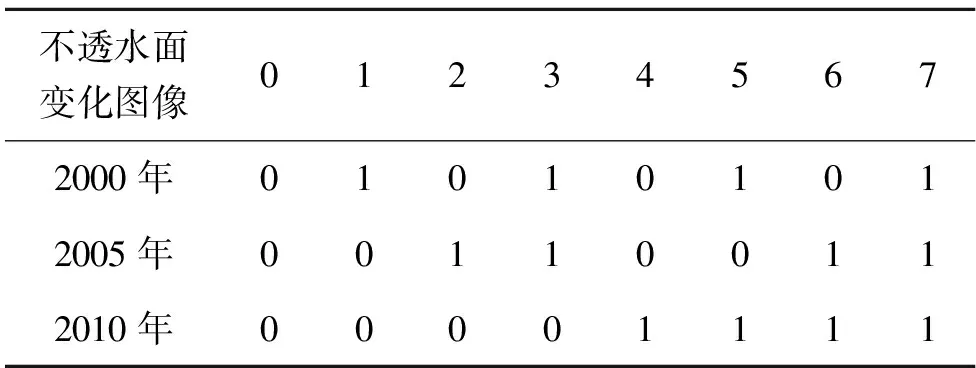
表1 不透水面变化图中像素值与不透水面图的对应关系
4 研究及分析
4.1 不透水面提取
4.1.1 数据预处理
研究区原始数据已经过初步辐射和几何校正。为确保影像匹配精度控制在1个像元内,以减少配准误差对变化研究精度造成的影响,利用FLAASH大气校正模块对影像进行大气校正去除气溶胶和视场角的影响,然后选择二次多项式进行几何精校正。在此基础上,使用宁波市矢量边界对TM影像进行裁剪拼接以获得2000年、2005年与2010年宁波市TM影像。
4.1.2 不透水面提取
本文提取不透水面的基本思想是首先对原始影像进行LBV变换,并归一化到0~255,采用决策树法提取裸地(非植被),再从裸地中进一步精确提取不透水面,决策树提取流程如图2所示。
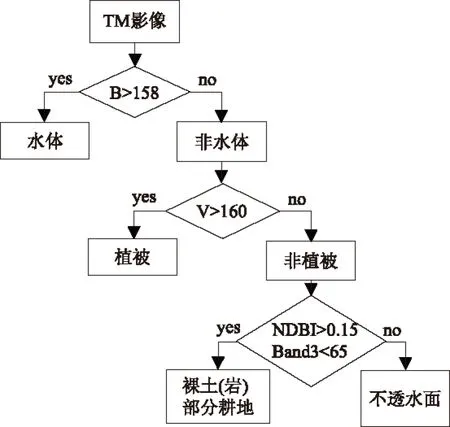
图2 决策树提取流程图
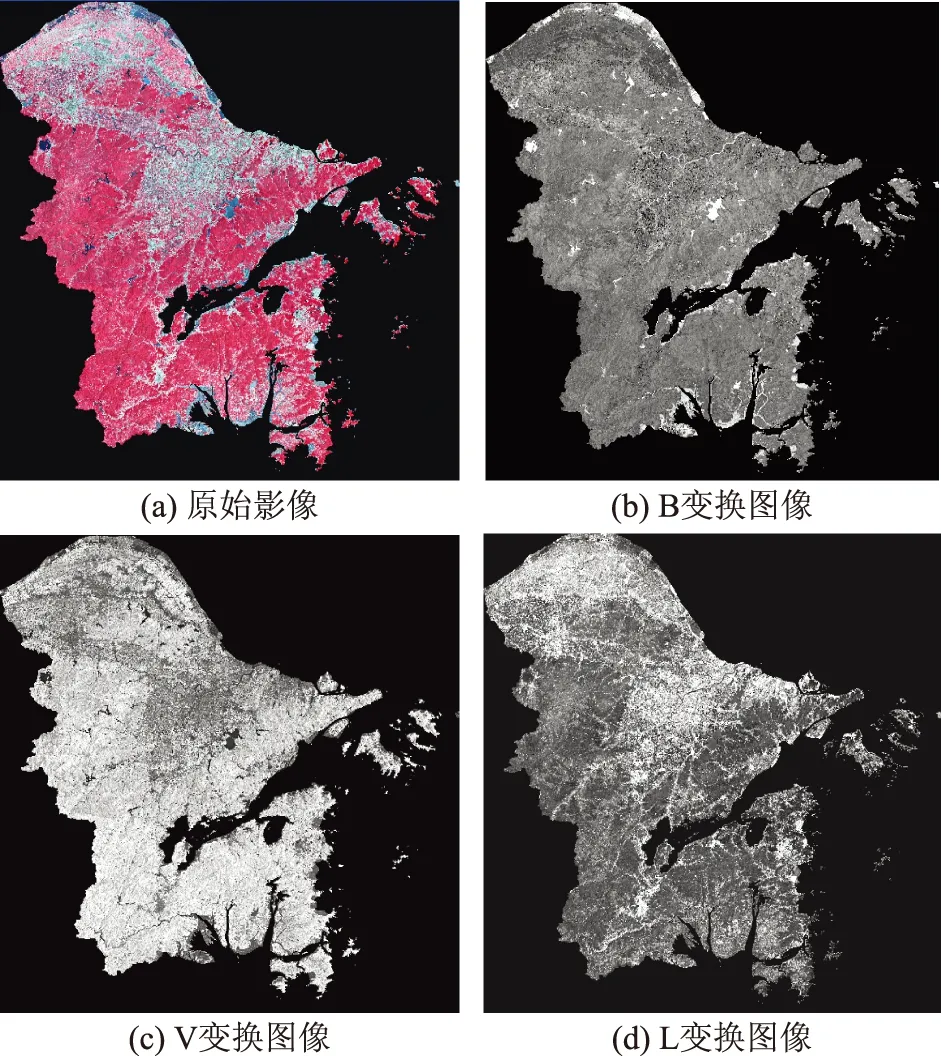
图3 原始影像和LBV变换图像
以2010年提取不透水面为例,试验区影像经过LBV变换后(图3),水体、林地、裸地在B、V、L图像上分别成高亮度显示,采用决策树通过选取阈值依次对水体、林地、裸地进行提取。本次研究对每一地物类型采集30个具有代表性的样本点,经统计如图4所示,分析出阈值B、V分别为158、160,用于提取水体、林地(包括耕地),裸地提取L阈值为175。
由以上基于LBV变换的决策树提取的裸地有一部分为与耕地、裸土(岩)的混合像元,本文首先采用由原始影像得到的NDBI[13]从裸地中提取不透水面,去除与耕地的混合像元;由于裸土(岩)和不透水面的光谱特征差别不大,此时得到的不透水面并非最终结果,观察两者的光谱特征可知裸土(岩)和不透水面在第3波段差异较大。故判别规则为:当NDBI>0.15且Band3<65时为不透水面,否则为裸土(岩),提取得到最终的不透水面如图5(a)所示。采用相同的方法对2000年、2005年不透水面进行提取,如图5(b)、图5(c)所示。最后以研究所获取的相应年份野外采样数据(2010年)和各时相高分辨率影像(2000年、2005年、2010年)作为研究依据,随机抽取300个采样点,分别对3期结果进行精度评价,相应的总体精度和Kappa系数如表2所示。

图4 样点LBV值统计
NDBI=(Band5-Band4)/(Band5+Band4)
(3)
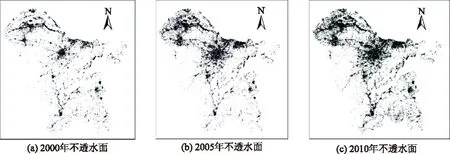
图5 3期不透水面结果图

表2 不透水面总体精度和Kappa系数
总体精度反映提取的整体效果,而Kappa系数是提取数据与参考数据间一致性的度量[15]。由表2可以看出,不透水面提取的总体精度均大于85%,Kappa系数都大于0.85。这样的精度为下一步进行变化研究提供了基础。
4.2 不透水面变化研究
在提取不透水面的基础上对宁波市2000年、2005年和2010年不透水面的变化进行研究。首先对3个时相的不透水面图分别二值化,再对二值化后的图像按照本文2.2节的公式(2)由3幅不透水面图生成一幅不透水面变化图(图6)。图中不同的颜色代表了叠加后不同的像素值,各像素值与叠加前的3年二值化不透水面图的对应关系见表1。由表1可知,在不透水面变化图中,表示2000年为不透水面的像素值有1、3、5、7,2005年为不透水面的像素值有2、3、6、7,2010年为不透水面的像素值有4、5、6、7。据此,可以根据不透水面变化图中像素值得到3期不透水面面积(像素)并检测任意2个时间段间隔的不透水面变化的分布情况。这里根据不透水面变化图中8个像素值(0~7)的个数,分别统计2000年、2005年和2010年的不透水面面积,得到宁波市3个年份不透水面面积和2个年份间隔内不透水面变化情况统计,如图7、图8和表3所示。

图6 不透水面变化图
结合图7、图8及表3所示的统计情况可知,宁波市2000年~2010年不透水面变化情况如下:
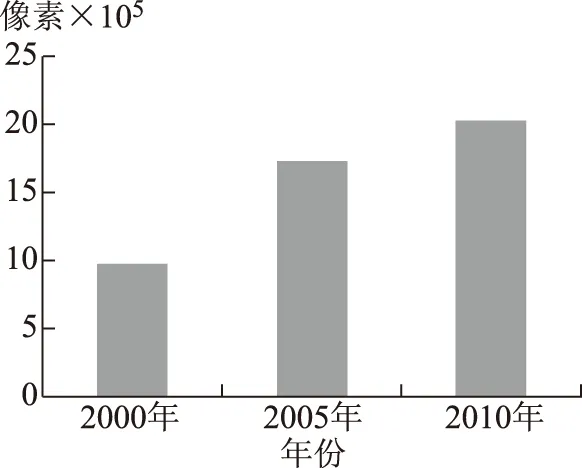
图7 3时相不透水面面积
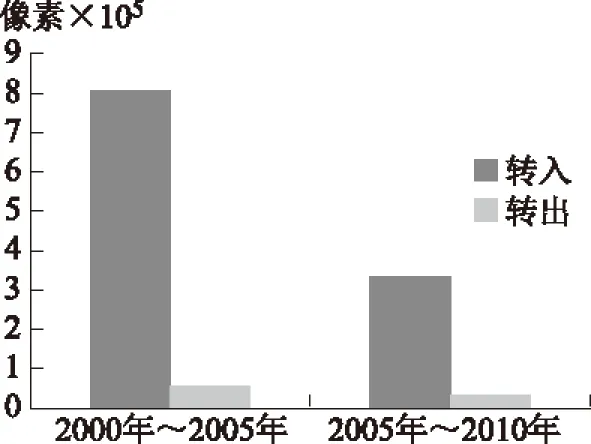
图8 不透水面变化情况

表3 5年间不透水面变化率
①宁波市不透水面10年间总面积呈现不断上升的趋势,并且由图6可知主要是在原有城区周围进行扩张。2000年总面积为98万像素约合885km2,2005年增至173万像素约合1557km2,到2010年达到203万像素约合1826km2。
②2000年~2005年宁波市不透水面变化率为7.328%,其中转入7.827%,转出0.449%;2005年~2010年变化率为2.906%,其中转入3.216%,转出0.310%。可见,这十年间2000年~2005年不透水面增长明显高于2005年~2010年,并且随着城市化的发展,土地覆盖类型发生变化,不透水面变化主要是由其它类型转入,而转出所占比例很少。
5 结束语
本文在遥感影像分类和变化检测的基础上,分析了宁波市2000年~2010年间不透水面变化情况。采用基于LBV变换的决策树分类法得到裸地,再对裸地使用NDBI和Band3进一步精确提取不透水面,精度达到85%以上,实践证明这样的方法用于不透水面提取是可行的。在得到3期不透水面的基础上,对其二值化,并利用这3幅不透水面图像中像素值与叠加生成的不透水面变化图中8种像素值之间的对应关系,对宁波市2000年、2005年和2010年总的不透水面以及2000年~2005年和2005年~2010年间的变化率进行统计,可知10年间宁波市不透水面呈不断上升趋势,并且前5年的增长明显高于后5年。实验证明本文的方法具有一定的使实用价值,但是该方法是在提取不透水面的基础上进行的变化检测,可能会导致误差累加,提取精度有待进一步提高。
参考文献:
[1] WENG Q.Remote sensing of impervious surfaces[M].Taylor & Francis:London:CRC Press,2010.
[2] 刘珍环,王仰麟,彭建.不透水面遥感监测及其应用研究进展[J].地理科学进展,2010,29(9):1143-1152.
[3] 林云杉,徐涵秋,周榕.城市不透水面及其与城市热到的关系研究[J].遥感技术与应用,2007,22(1):14-19.
[4] 潘竟虎,李晓雪,刘春雨.兰州市中心城区不透水面覆盖度的遥感估算[J].西北师范大学学报(自然科学版),2009,45(4):95-100.
[5] 岳文泽,吴次芳.基于混合光谱分解的城市不透水面分布估算[J].遥感学报,2007,11(6):914-922.
[6] 王天星,陈松林,马娅.基于ASTER数据源的地表参数关系分析—以福州市为例[J].资源科学,2008,30(8):1275-1281.
[7] 徐涵秋.一种快速提取不透水面的新型遥感指数[J].武汉大学学报(信息科学版),2008,33(11):1150-1153.
[8] 袁竞,王希华.基于3S技术的宁波市东部区域常绿阔叶林动态初步研究[J].华东师范大学学报(自然科学版),2012(4):142-148.
[9] 谢欢,童小华,仇雁翎,等.黄浦江上游遥感监测溶解氧模型与时空变化[J].光谱学与光谱分析,2007,27(8):1574-1579.
[10] ZENG Z.Y.A new method of data transformation for satellite images:Methodology and transformation equation for TM Images[J].Remote Sensing,2007,28(18):4095-4124.
[11] 周文鑫,何隆华,马荣华,等.基于面向对象的TM_LBV变换水体信息提取[J].中国科学院研究生院学报,2012,29(6):775-779.
[12] 曾志远.卫星遥感图像计算机分类与地学应用研究[M].北京:科学出版社,2004.
[13] 曹亚乔,曾志远,曹建洲,等.常用卫星图像数据光谱变换新方法[J].遥感技术,2009(10):17-19.
[14] 查勇,倪绍祥,杨山.一种利用TM图像自动提取城镇用地信息的有效方法[J].遥感学报,2003,7(1):37-40.
[15] LILLESAND T M,KIEFER R W,CHIPMAN J W.Remote sensing and image interpretation Fourth Edition[M].New York:John Wiley& Sons,Inc,2003.
