一种基于扫描点云数据储气罐支柱形变监测新方法
2014-08-01李章树马磊马小雪谢潇庄逐舟
李章树,马磊,马小雪,谢潇,庄逐舟
(1.西华大学建筑与土木工程学院,成都 610031;2.南京大学地理与海洋科学学院,南京 210046;3.中国建筑西南勘查设计院有限公司,成都 610031;4.宁夏大学资源环境学院,银川 750021)
1 引 言
本次实验的主要构筑物为8个高压球形罐,内径为了12.312m,基础中心直径为12.26m,每个球形罐容积为1000m3,每个球形罐由8根钢支柱支撑,钢支柱高度为7.8m,与罐体结合部位为50cm。实验先利用全站仪对所有罐体的支柱实施了形变检测,然后采用瑞士徕卡HDS三维激光扫描仪对储气罐支柱再次进行检测并将实验结果进行了对比分析。
三维激光扫描技术又称作高清晰测量(High Definition Surveying,HDS),它是利用激光测距的原理,通过记录被测物体表面大量的密集点的三维坐标信息和反射率信息,将各种大实体和实景的海量点云数据完整地采集到电脑中,其扫描速度可以达到50000点/秒,视场角可达270°,表面模型精度可达1mm。本文利用Leica TCA2003扫描仪扫描的海量点云数据在Cyclone软件里进行数据预处理,实现储配站的点云数据的匹配、建模及粗差探测。然后在Matlab平台下编程制计算煤气罐支柱断面和球体的中心坐标,自动绘制出成果数据的三维图形,为储气罐的安全性提供直观可靠的科学数据。

图1 Leica三维激光扫描仪扫描储气罐
2 海量点云数据处理
2.1 点云数据的拼接
TCA2003精密电子扫描仪扫描的储气罐三维数据是以各测站的文件分别存放,需要对各测站点云数据进行拼接。由于受外界施工、光照等因素的影响,每一站的数据都会存在噪音点,所以首先通过随机软件Cyclone对点云数据去除噪音点。然后通过设置的站标拼接点云数据。虽然任一站扫描所得数据的内部点相对位置都是正确的,但不同站间的坐标系并不匹配。为统一坐标系,需进行多站拼接。所有数据是以每天每站的形式存储,每一测站的数据都是一个单独的坐标系。拼接的思路是先将每天中各测站的数据拼接成一个数据,然后拼接整体数据。图2为第二储配站点云数据拼接结果图。

图2 第二储配站点云数据拼接结果
2.2 点云数据的计算
2.2.1 点云数据的提取
使用Cyclone软件提取出每一根支柱及罐体的点云数据,分别保存成文本文件,首先要对每根支柱及罐体的数据进行残余噪声剔除处理,以避免像扫描的拉杆或其他遮挡物的影响。由于柱体切割时通过手工完成难免具有噪声数据,首先根据柱体的切片数据,在程序中计算出初始圆心,在数据中设置离初始圆心的距离阀值过滤掉噪声数据,使得参与计算的数据更加准确。图3为噪音比较明显的切面数据。图4为过滤后的切面数据。

图3 筛选前点云数据的平面投影

图4 筛选后点云数据的平面投影

图5 分割柱体离散点拟合圆示意图
2.2.2 支柱切片拟合圆计算
根据柱体和球体离散点Z的坐标每隔0.1m切出每个柱体在XY坐标中的投影离散点,如图5所示。通过分离出的离散点在程序中通过对柱体渐进循环拟合算法得出圆柱切面圆和圆心坐标和半径。并以圆心槽坐标x、圆心纵坐标y、半径z、高程的格式写入文本文件。
根据海量的点云数据投影到水平面的离散点数据集中拟合出最佳圆,首先需要构造一个解析函数使得在原离散点上尽可能接近给定的值。程序的算法不仅要考虑拟合圆的精度也要考虑算法的运算速度。我们选择Taubin method,该算法由G.Taubin于1991年提出。该程序属于强健和精确圆拟合,即使数据点只是很小圆弧范围内,也能拟合令人满意的结果。这种算法的稳定性和效率都有让人满意的结果。该方法的步骤为:
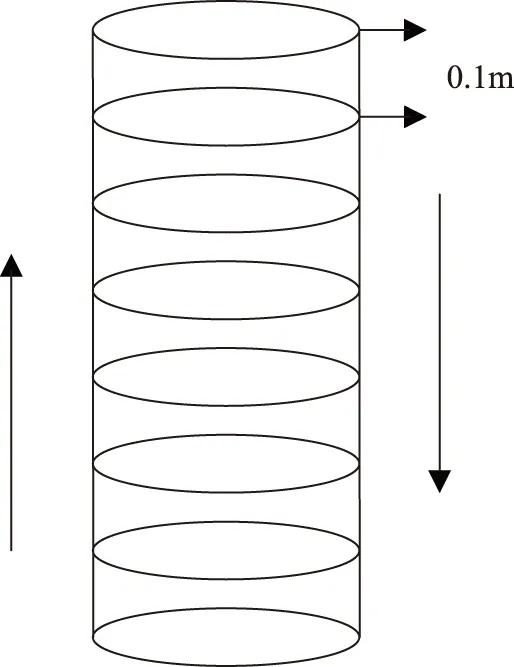
图6 分割柱体离散点拟合圆示意图
①定义一个以圆心横坐标、圆心纵坐标和半径为变量的测度函数;
②将已知样点的横坐标的平均值、纵坐标的平均值分别作为圆心横坐标、圆心纵坐标的初始值,将半径的初始值取为零;
③分别求取测度函数的梯度和hessian矩阵,然后利用测度函数的梯度和hessian矩阵求取更新步长;
④利用更新步长对圆心横坐标、圆心纵坐标和半径的取值进行更新;
⑤设定一个阈值,当更新步长大于该阈值时,返回步骤3;当更新步长小于等于该阈值时,则结束圆拟合过程;最后更新得到的圆心横坐标、圆心纵坐标和半径的取值即为圆拟合过程的最终结果。
2.3 罐体支柱计算结果的变形分析
2.3.1 支柱变形数据绘图直观表示
通过上述拟合计算的结果,利用Matlab的绘图功能实现批量绘制支柱的三维视图、支柱中心的俯视图及三维视图。通过对变形值的放大,可以直观的看出每根支柱的变形量。以4号罐4号支柱为例,图7、图8、图9为罐体支柱变形视图。

图7 2储4号罐4号支柱三维视图

图8 2储4号罐4号支柱中心俯视图

图9 2储4号罐4号支柱中心三维视图
通过分析可知,图7可以直观地看出支柱的变形状况,其中2储4号罐4号支柱整体变形较小、没有明显的弯曲;图8可以看出支柱在横坐标和纵坐标两个方向上的变化均不超过4mm和7mm;图9和图7一致,是支柱中心坐标的变化,可以看出支柱在顶部8m左右的变形量相对较大。
2.3.2 支柱变形切向分量及径向分量的计算
点云数据及支柱切片圆数据均是基于空间直角坐标系的,根据测量规范,需在切向及径向两个方向上表现支柱的变形状况。需对不同高度上的每个切片圆数据进行仿射变换。原理如下:

(1)
式中,(X,Y)为支柱变形切向分量及径向分量,(x,y)为支柱变形量的直角坐标。Δx、Δy、θ、m分别为平面上的平移、旋转、尺度参数。对于本工程,Δx、Δy为支柱高度1m以下切片圆中心平均坐标,其余计算的所有周向分量及径向分量均是以这个平均坐标作为参考,其数据表明了各罐体支柱的变化量,即支柱的倾斜状况和直线度。θ可以通过罐体中心与切片圆中心连线的方位角计算得到。尺度变换参数m为1。通过Matlab编程实现了支柱变形切向分量及径向分量的计算(图10)。

图10 支柱变形周向分量及径向分量计算示意图
3 结束语
本文将徕卡三维激光扫描仪应用到储气罐支柱的变形监测中,利用Matlab软件实现了海量点云数据的自动提取与计算的方法。得出了储气罐的支柱垂直度、直线度、周向变形量、径向变形量,计算结果与实际测量结果相符,计算结果准确可靠。利用这种技术能够有效的提高储气罐变形监测的效率,降低成本,并且能够得出丰富的可视化成果,为储气罐的安全性提供准确有效的科学数据。
参考文献:
[1] 牟学军,李春玉.低压湿式储气罐变形研究[J].辽宁化工,1997,3(2):25-25.
[2] 龙玺,钟约先,李仁举,等.结构光三维扫描测量的三维拼接技术[J].清华大学学报,2002,4(6):447-480.
[3] 张志涌,杨祖樱.Matlab教程[M].北京:北京航空航天大学出版社,2010.
[4] 张新长,马林兵,张青年.地理信息系统数据库[M].北京:科学出版社,2005.
[5] 刘春,陆春.三维激光扫描数据的压缩与地形采样[J].遥感信息.2005,2(2):6-10.
[6] VALKENBURG R J,MCIVOR A M.Accurate 3-D measurement using a structured light system[J].Image and Vision Computing,1998,16(2):99-110.
[7] 马颂德,张正友.计算机视觉计算理论与算法基础[M].北京:科学出版社,2003.
