侧式悬臂堆料机的方案确定及整机设计
2014-07-30佟云龙韩志永
佟云龙 韩志永
(北方重工集团有限公司装卸设备分公司,辽宁 沈阳 110027)
1 按基本参数确定设备方案
1.1 堆料方式的选择。
堆料方式分为人字形堆料和定点堆料两种。选择哪种堆料方式取决于工艺对于均化比的要求。一般来说,主料要求颗粒均匀,均化效果好。于是采用的是人字形堆料方式。辅料相对工艺要求差,可用定点堆料方式。
堆料方式不同,与之配对的取料机取料方式的也不同。人字形堆料方法堆料机在料堆作业范围内往复行进堆料,配合桥式刮板取料机全断面取料,在断面方向上各料层均匀分布。
定点堆料就是从一个固定的点开始堆料,在此位置达到预设的堆高后,按电气程序移动相应距离开始另一点的堆料,直至完成整个料堆的作业。配合的是侧式刮板取料机,采用侧面取料。对均化比的要求不高。综上所述,我们可以根据物料种类、堆料方式、取料机形式来确定堆取料机的配合是否合理。
1.2 储量的计算
一个料场中,由于储存物料种类的不同,可能在长方向上布置了几个料堆。我们要分别对其进行储量的核算。以单个的一个料堆为例:
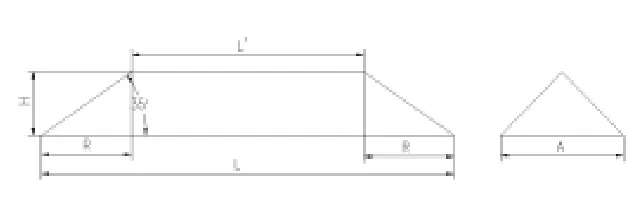
图1
原始参数:石灰石,容重:γ=1.4t/m3, 物料安息角α=35度,堆高H=12.5m,堆底宽A=35.5m,要求储量T=40000t
堆截面积F:

堆总体积U:

端堆体积U':设料堆两端为理想半圆锥,两端合成可看成一个圆锥体。
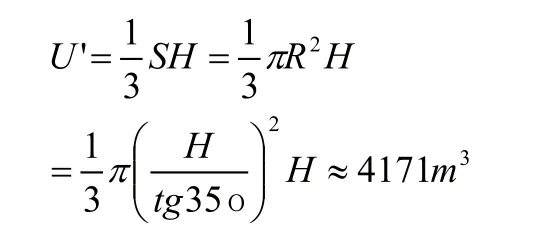
可以求出料堆长度


料堆总长度
用这个数值和料场工艺布置图中的料堆长度作比较,可判断出是否达到额定的储量。
1.3 堆料层数与均化比
原始参数:堆料能力:Q=800t/h,堆料机行走速度V=20m/min
可算出:单元料层截面积

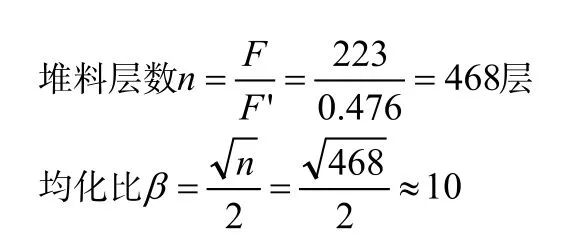
堆料层数和粒度有关,料堆每层厚度小于物料粒度会产生离析现象,不利于物料均化。
1.4 地面基础布置
地面的布置方面主要是轨道基础和电缆坑位置的选择。
轨道基础首先预设停车位置,把车档的位置确定下来。注意要留有一定的缓冲距离。然后计算轨道的长度。轨道最长的位置,是堆料机停车后,尾车一端最后一个车轮的停车位置,再留一定的余量。
电缆是提供堆料机动力和控制信号的来源。在料场长方向上,由于堆料机的特殊结构,不是单纯的把料场的中间点作为电缆坑的位置点。这样固然可以满足配送的需要,不过却不得不人为加长尾车行进方向上的电缆长度,浪费了材料。原因是相对于料场而言,堆料机上电缆卷盘的左右行驶距离不是对称相等的。所以电缆坑的位置,应是电缆卷盘在左右两极限位置停车时,所产生距离的中间点作为电缆坑的最佳地点。即节约了成本,也使电缆长度合理。
2 细化堆料机内部结构设计
根据不同料场的特点,在满足工艺的要求之后,堆料机的基本形式就定下来了。接下来就要对堆料机的各部件进行设计。堆料机主要由:配重系统、行走机构、堆料臂架、液压系统、尾车、动力电缆卷盘、控制电缆卷盘、控制室、行走限位装置等组成。工作时,物料通过来料车上的来料皮带被源源不断的送到堆料臂架上,堆料臂架按设定的程序或定点堆料或往复堆料进行堆料作业,在达到堆高要求后,臂架上仰至最高角度,准备换堆作业。在臂架上仰下俯的堆料作业过程中,行走机构带动整机在轨道上行进。各部件协同作业,完成堆料任务。
2.1 配重系统
现在的配重一般采用的是钢筋混凝土结构,而不采用以前配重箱和配重块的结构。现场制作,节约生产和运输的成本。配重的合理加载是要保证重心在两轨之间。
2.2 悬臂部分
悬臂架由两个变截面的工字型梁构成。横向用钢板连接成整体。工字型梁采用钢板焊接成型。因运输限制,臂架厂内分段制造,现场焊接焊接成整体。
悬臂架上面安有胶带输送机,胶带机随臂架可上仰、下俯。首先要确定带宽、带速等参数,再设计与之配套的臂架钢结构。
比如,堆料量Q=400t/h,煤γ=0.9t/m3
以DTII型胶带输送机手册为参考,先根据带速V,带宽B与能力Iv之间的关系表格,初定带宽和带速的值。
按手册初选Iv=496,对应B=800,V=2m/s。
则实际运量能力Iv'
=Iv*γ*k=496*0.9*0.89=397.296<400
K:倾斜输送机面积折减系数
假设不成立。加大一档。
选Iv=620,对应B=800,V=2.5m/s,其余不变。
则实际运量能力Iv'
=Iv*γ*k=620*0.9*0.89=496.62>400
假设成立。
再核一下带宽。
Q=S*V*γ*k
S:胶带机物料最大横截面积;V:带速;γ:容重;k:倾斜输送机面积折减系数
将各已知值带入上述公式,可推导出横截面积S小于DTII型胶带输送机手册中的标准值,则合理。若大,按上述步骤加大一档,重校核。
值得注意的是,在胶带机的落料端,设有挡料板,和皮带拉紧装置。在皮带张紧后,挡料板用于调节落料的轨迹,使料堆中心线不产生太大的误差,以免料堆倾斜,覆盖一侧轨道。
2.3 行走机构
行走机构由支架和行走驱动装置组成。支架与上部悬臂铰接,堆料臂的全部重量压在支架上。立柱下端外侧与一套行走驱动装置连接,内侧与一套行走驱动装置连接成一体,每个端梁配一套驱动装置,驱动装置共两套。
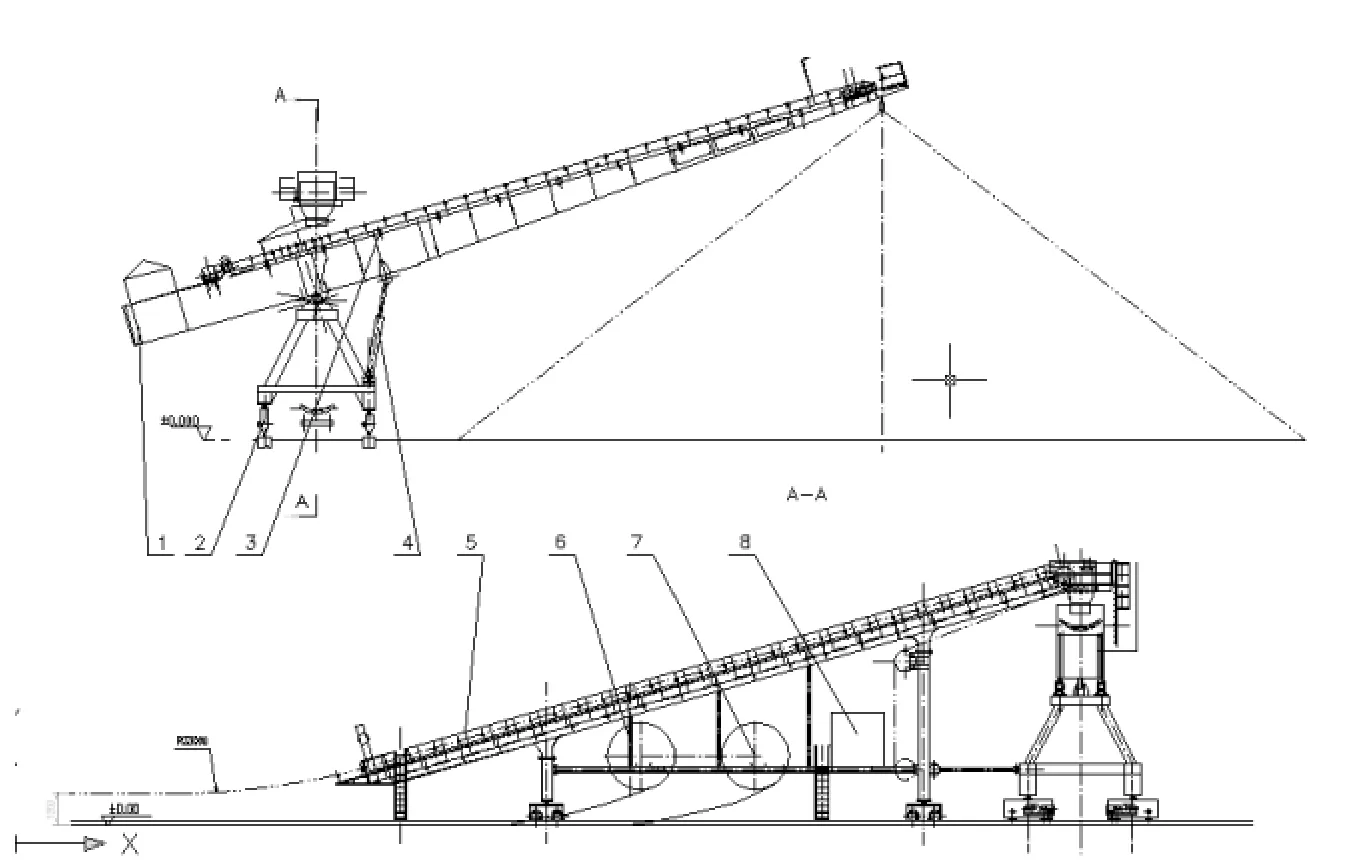
图 2
行走驱动装置采用三合一齿轮减速电机—车轮系统的传动形式,驱动系统的同步运行是靠结构刚性实现的。
功率的计算:
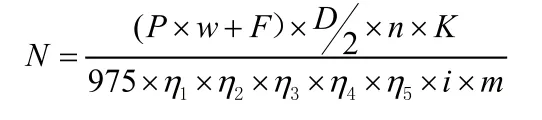
P:整机总重(Kg);w:摩擦阻力系数取w=0.006;F:胶带阻力(Kg╳g);D:车轮直径(m);n:电机转数;(r/min);K:备用系数,堆取料机中通常取用1.4 ;i:总传动比;m:电机数量;
上述公式可直接计算出行走所需的功率,应用此公式时,要求已知电机转数和数量,在计算之初就要确定好。n为单台电机的功率,整机行走驱动功率值为n×m,通过以上计算得到的功率可以作为初步设计值应用。
2.4 来料车
堆料胶带机从来料车通过,将堆料胶带机运来的物料通过来料车卸到悬臂的胶带机上。来料车由卸料斗、斜梁、大小立柱、平台等组成。设计时要注意的是,来料车的尾部不宜过长。因为一般来料车的尾部是悬空设计,尾部太长在走行时,会造成抖动严重的现象。
来料车倾斜角度的设计源于堆高的高度。料堆越高,堆料臂架上仰角度也越大,来料车自然也随之抬高。一般设计中来料车的角度常取15-16度。当出现尾部过长时,也可增加1-2度。使全局合理。
2.5 液压系统
液压系统实现悬臂的变幅运动。液压系统由液压站、油缸组成,液压站安装在立柱下部的平台上,而油缸支撑在支架和悬臂之间。
2.6 电缆卷盘
动力、控制电缆卷盘由单排大直径卷盘、集电滑环、减速器及力矩堵转电机组成。提供整机动力和传递与中控室的信号。
动力和控制电缆卷盘的选取原则是:先选取对应的电缆,根据堆数、长度、压降等方面,选择对应的电缆。根据电缆的重量、对地高度等参数,选择对应的卷盘型号。
2.7 控制室
控制室的选定不是随意的。它的原则是,根据电气控制柜的数量和大小,来确定控制室的大小。方向上要注意的是,在面向料堆侧有可随时观测的大窗口设计。这才是合理的布局,方便堆料作业时的控制。
其它还有许多需要主设人员考虑的方面,比如说,当地的海拔、气候条件、是室内作业还是露天作业。相对的就要考虑是否采用高原电机,防尘、防水等级。再者当地是三相几线制的电源,频率。设计中的各个细节都要仔细分析,才能保证设备的正常动作。
结语
对产品各部件全盘的掌握和了解是进行整机设计的基础。当着眼于全局时,一要保证设备的参数和性能可以满足客户对于堆料机的作业要求,二要保证堆料机在料场中与其它接口设备的顺利相接。这样,才能使作为非标设备的堆取料机达到合格的设计要求。
[1]高长明.矿物原料预均化[M].北京:中国建筑事业出版社,1983.
[2]机械工业部北京起重运输机械研究所.DTII型固定式带式输送机设计选用手册[M].北京:冶金工业出版社,1994.