四大系统的卫星导航电文概论── GNSS导航信号的收发问题之五
2014-07-25刘基余
刘基余
(武汉大学测绘学院,武汉 430079)
GPS,GLONASS,Galile和北斗系统被简称为“四大系统”。按照“定位电文”之异,可分两大类型:第一类是“在轨坐标式”,它是发送导航卫星的在轨三维坐标,以及导航卫星的速度和加速度,例如,GLONASS卫星的导航电文即为在轨坐标式;第二类是“轨道参数式”,它是发送导航卫星的开普勒轨道及其摄动参数,例如,GPS卫星的导航电文即为轨道参数式。本文拟对两者予以简要论述,以便读者详细解读相关卫星导航电文。
1 GLONASS卫星的导航电文
GLONASS卫星的导航电文,是一种用数字信息流形成的连续重复帧群。它包括超帧、主帧和子帧(如图1所示)。一个超帧含有5个主帧,每一个主帧占用30s,一个主帧包括15个子帧,每一个子帧持续2s时间,传递100个信息位,共75个子帧;因此,需要2.5分钟才能传送完毕一个超帧电文。一个占用2s的子帧,其中1.7s用于发送信息位和纠错码(汉明码),它们均以相对双二进制码表示,共84位,而它们的第85位用作时标码补充位,该位恒为零;纠错码(汉明码)共8位,码距为4。一个子帧的剩余0.3s用于发送时标码,该时标码是由30个码元组成的截短伪噪声序列(1111100…110)。
GLONASS卫星导航电文传送的数据分为两大类型:一类是可操作数字信息,其更新率为30分钟,在定义该数据实用时间之前15分钟传送的数据,由用户借助前推或后推的方法,求得传送时元前后15分钟的需用数据。可操作数据包括卫星时标数据,卫星时钟相对于GLONASS时间系统的时钟数据,射电频率与其标称值之差的数据,卫星位置及其速度数据。另一类是不可操作数据,其更新率为24小时;不可操作数据包括预报的全部卫星状态,各颗卫星时钟与GLONASS时间系统的偏差数据,各颗卫星的概略轨道参数(历书数据),GLONASS时间系统的修正参数,它被用于归算成莫斯科世界协调时,进而便于化算成巴黎国际时间局(BIH)的世界协调时。
从图1可见,第1~4子帧和第61~64子帧用于发送该卫星的星历,其内容如下所述字码所示:
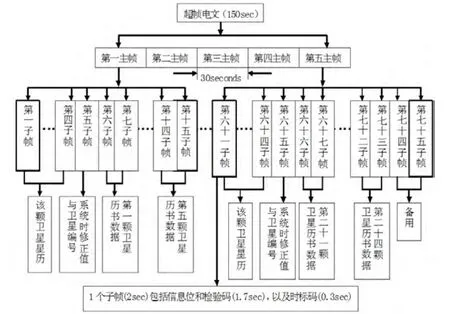
图1 GLONASS卫星电文的基本结构
M为子帧序号;tk为当前天数内主帧的起始时间,它可由卫星电文的时标推算出来,5个高位符表示从当前天数开始经过的整小时数,6个中间位表示从当前小时开始时元经过的整分数;Bn为包括3个二进位,GLONASS信号接收机能够分析出这个Bn字码的高位,若它为“1”,表示对该颗卫星观测无效,但接收机不能够分析出Bn字码的第2和第3位;tb为可操数字信息的时间基准,它基于莫斯科法定时间;tb的间断时间为15分钟,按卫星时标的30分钟或60分钟的倍数更新可操作数字信息;n1为可操作数字信息的更新标识符,它是tb值(min)当前主帧与前一主帧之间的间隔时间,n1标以00,01,10和11,它们对应于△tb值分别为0分钟,30分钟,45分钟,60分钟;n2为当前分钟时间段30(60)序号的标识符,它标明在奇数“1”或偶数“0”之间的tb值;n3为历书发送状态,当n3为“1”状态时,该主帧发送5颗卫星的历书数据,当“n3”为“0”状态时,该主帧只发送4颗卫星的历书数据;γn(tb)为第n颗GLONASS卫星载波频率的预报值于时元tb相对于标称值之差:

式中,fn(tb)为第n颗卫星的载频预报值;fHn是第n颗卫星的载波标称值;Tn(tb)为第n颗GLONASS卫星时间tb相对于GLONASS系统时间tc的差值,且知



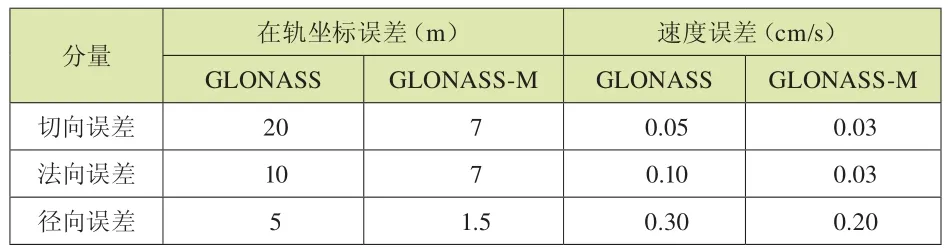
表1 GLONASS卫星和GLONASS-M卫星的广播星历精度比较
2003年10月以来实施的GLONASS现代化,也使GLONASS卫星的导航电文发生了一些变化。自第一颗GLONASS-M卫星于2004年12月开始向广大用户发送导航定位信号以来,它的导航电文就增加了一些新的电文内容。后者是利用原有电文的备用空间播发的,与原电文不发生冲突。GLONASS-M卫星的导航电文增加了下述内容:
(1)τGPS。τGPS代表GPS与GLONASS之间的系统时间差。GPS与GLONASS分别使用各自的时间系统,即GPS时系与GLONASS时系之间相差1μs左右。在使用该两系统混合定位时,通常需要设定本地接收机与各自导航系统的时间修正量,然后再分别修正各自系统的时间模型,解算复杂。τGPS的出现,统一了GPS与GLONASS的时间标准,可以简化混合定位时的解算过程。需要指出的是,由于GLONASS随UTC跳秒,而GPS不跳秒,二者存在十几个整秒差,该秒差由GPS的历书提供。τGPS仅是两系统时间差值的小数部分。GLONASS.ICD指出τGPS的精度为30ns(1 σ)。
(2)In。In为星上电文完整性检验标志。虽然GLONASS的星历与历书均有健康标志Bn与Cn,但从检验出错到信息给出存在1分钟左右的延迟。In的延迟仅为10秒钟,它可以帮助用户更及时地发现问题。
(3)KP。KP是GLONASS时间在相应时间点是否发生跳秒的预报参数。GLONASS时间是随UTC跳秒而跳秒的。全年一共有4个时间点可能发生跳秒,分别是UTC时间1月1日、4月1日、7月1日和10月1日的午夜零时。GLONASS-M卫星将于相应的时间点前8周内给出KP信息供用户参考。
(4)N4与NT。N4代表从1996年开始,4年为一周期的周期数;NT代表在4年周期内,从闰年1月1日开始至当前的累计天数。比如N4=3,NT=1013对应的UTC时间为2006年10月10日。第一代GLONASS卫星的电文中仅能反映4年以内的时间信息,且GLONASS天数NA往往两天才更新一次,因此,没有GPS的校准是无法准确得到当前的UTC时间的。因此,GLONASS-M卫星解决了GLONASS时间的模糊问题。
GPS时间的周数受到了电文数据位的限制,累计到1024周后自动复零,因此,GPS时间存在周期大约为20年的模糊问题。双系统接收机可以利用GLONASS-M卫星的电文N4与NT对GPS时间进行校准,避免GPS时间模糊问题的困扰。
(5)FT。FT为GLONASS-M卫星提供的伪距测量精度估值,它能使用户更有效地利用接收机的原始观测量,FT与GPS电文提供的URA值属于同一类型。
FT与URA的取值范围均为[0,15],随着数值的增大,表示伪距测量精度越来越差。当它们均取值为15时,代表该颗卫星的伪距测量精度缺乏估计值,用户需要通过其他的方式获得伪距精度。目前所有的GLONASS-M卫星的FT均为15,代表此参数无效。
(6)B1与B2。B1与B2为计算UTl与UTC(SU)差值的系数。具体的计算公式为:

(7)τc。τc是GLONASS时系与UTC(SU)之间的修正量。原GLONASS电文也有这个参数,精度为2-27秒,GLONASS-M卫星的电文将此参数的精度提升至了2-31秒。
(8)n。n为GLONASS-M卫星的在轨卫星编号。接收机在冷启动搜索GLONASS卫星时,往往是一个通道分配一个频点。但通常情况下,一个频点对应着两颗GLONASS卫星,因此,在没有n的情况下,具体是哪一颗卫星需要通过其他的方法来判断。本参数的给出,简化了接收机的冷启动过程。
上述导航电文新内容,已由在轨作业的GLONASS-M卫星播发,并通过了我国GNSS导航信号接收机给出的验证。
2 GPS卫星的导航电文
GPS卫星的导航电文主要包括卫星星历、时钟改正、电离层时延改正、工作状态信息以及C/A码转到捕获P码(详见下文转换码)的信息。这些数据是以二进制码的形式发送给用户的,故卫星电文又叫数据码,或称之为D码。它的基本单位是长达1 500比特的一个主帧(如图2所示);它的传输速率是每秒50比特,30秒钟才能够传送完毕一个主帧。后者包括5个子帧,第1,2,3子帧各有10个字码,每个字码为30比特;第4,5子帧各有25个页面,共有37 500比特,长达12.5分钟;它们不像第1,2,3子帧那样,每30秒钟重复一次,而需要长达750秒钟才能够传送完毕第4,5子帧的全部信息量,也即,第4,5子帧是12.5分钟才重复一次;这表明,一台GPS信号接收机获取一帧完整的卫星导航电文,需要750秒钟。GPS卫星电文各子帧内容概如图3所示,其基本意义如下所述。
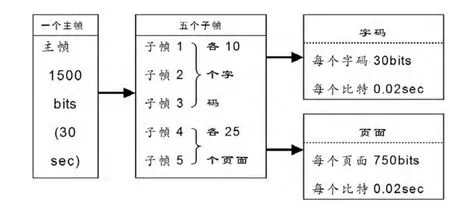
图2 卫星电文的基本构成图
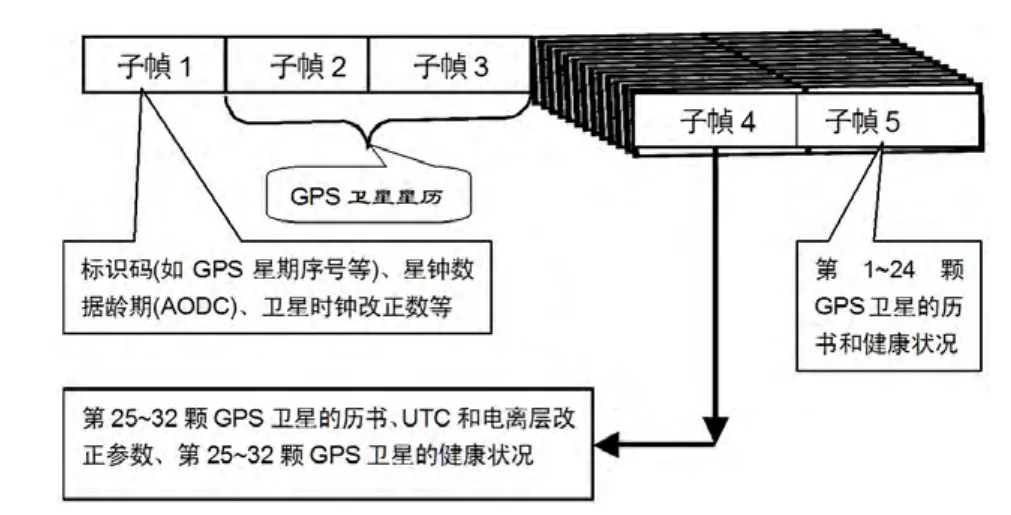
图3 GPS卫星电文的基本内容
2.1 遥测码

图4 GPS卫星导航电文的遥测码
每个子帧的第一个字码都是遥测码(TLW,Telemertry Word),它的主要作用是指明卫星注入数据的状态。遥测码的第1~8比特是同步码(10001011),作为识别电文内容的先兆,致使用户易于解调导航电文。第9~22比特为遥测电文,它包括地面监控系统注入数据时的状态信息、诊断信息和其他信息,以此指示用户是否选用该颗卫星。第23和第24比特是备用比特;第25~30比特为奇偶检验码,它用于发现错误,纠正个别错误,确保正确地传送导航电文。
2.2 转换码
每个子帧的第二个字码都是转换码(HOW,Hand Over Word),它的主要作用是帮助用户从所获的C/A码转换到P码的捕获。转换码的第1~17比特表示所谓的Z计数,后者表示自星期天零时至星期六24时,P码子码X1的周期(1.5s)重复数,即Z计数的量程是0~403200。因此,知道Z计数,便可较快地捕获到P码。转换码的第18比特表明卫星注入电文后有否发生滚动动量矩卸载现象;第18比特用于指示数据帧的时间是否与子码X1的钟信号同步;第20~22比特是子帧识别标志;第23和第24比特是无意义的连接比特;第25~30比特是奇偶检验码。

图5 GPS卫星导航电文的转换码
2.3 第一数据块
第一子帧的第3~10字码称为第一数据块(见图6所示);它的主要内容是:①标识码,它指明载波L2的调制波类型、星期序号、卫星的健康状况等;②数据龄期;③卫星时钟改正系数。值得注意的是,第一批的1024个GPS星期已于1999年8月22日子夜结束,新的GPS星期数已于该结束时元起算。第一批GPS星期数,是从1980年1月5日子夜/6日凌晨开始起算;直到1999年8月22日子夜/23日凌晨为止,共累计为1 024个GPS星期,当其结束时,即为新的GPS周数开始起算。例如,1999年8月29日,是第二批GPS星期数的第一个GPS星期。因此,所用的GPS信号接收机及其相应的数据处理软件,均应作GPS周数变换调整,否则,GPS信号接收机将发生计算粗差,甚至拒绝定位计算。第二批GPS星期数,将于2019年4月6日子夜结束;第三批GPS星期数将于该结束时元起算,而于2038年11月20日子夜结束它。现对上述三方面的有关参数予以说明。
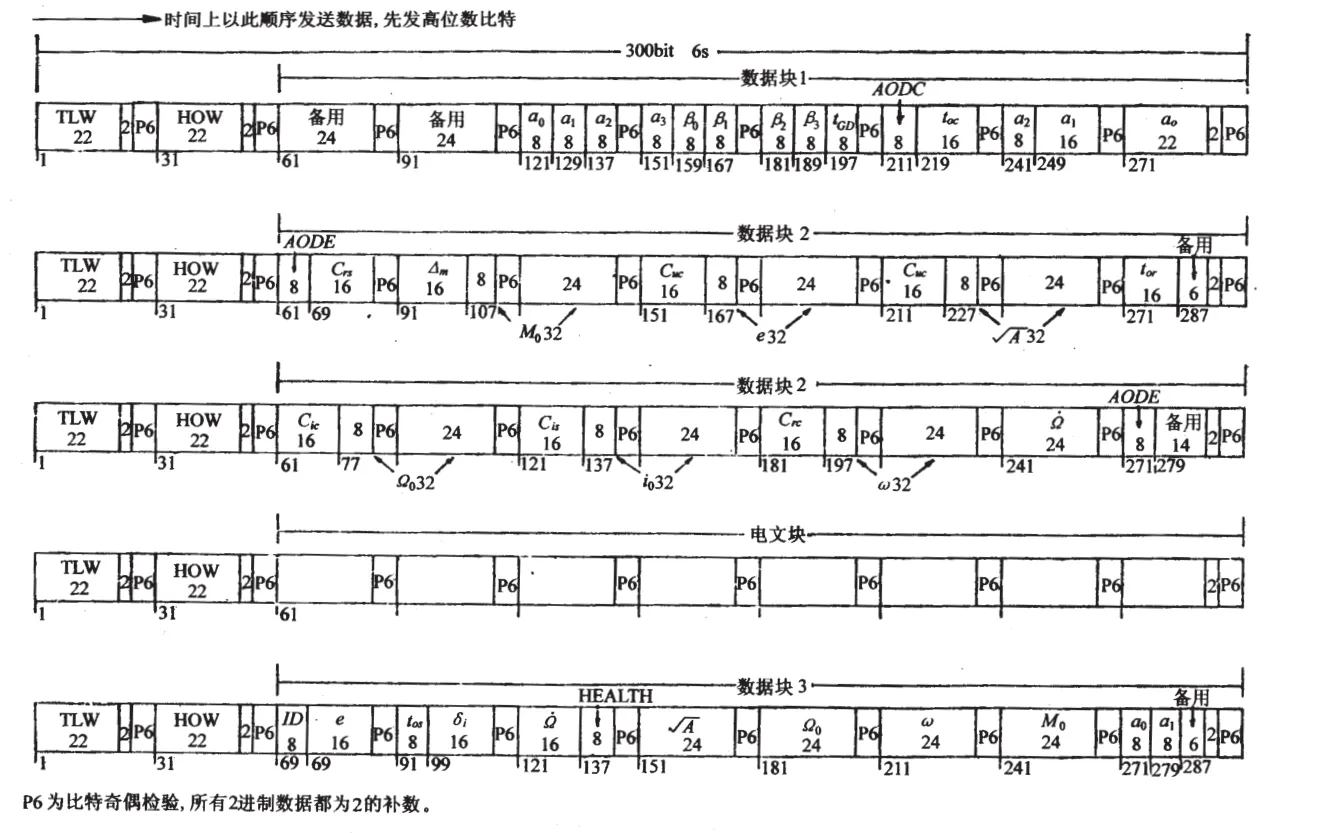
图6 GPS卫星电文的结构
2.3.1 传输参数N
第3字码的第13~16比特给出传输参数N,它向非特许用户指明,当用该颗GPS卫星作导航定位测量时,可能达到的测距精度(URA,即是Predicated User Range Accuracy)。URA值的传输参数N为0~15。当N为1111(=15)时,表示用户可达测距精度(URA值)大于6 144m,非特许用户若用该颗卫星进行导航定位测量,则他们自己承担风险,意即不能确保能否获得令人满意的导航定位精度。传输参数N与用户可达测距精度(URA)的对应关系如表2所示。但是,在我国境内用Trimble 4000SST双频接收机所作三年的实际测量数据表明,即使传输参数等于9,非特许用户也不宜用该颗卫星作导航定位测量;例如,用这种卫星测量8m左右的站间距离时,GPS测量值与其标准值之较差大达11.2cm(应为亳米级),而无法获得预期的定位精度。而且各颗GPS卫星的URA值(其具体数值如图7所示)不过逐年在提高(如图8)。近年来,由于Block II-R/II-R-M卫星实施了星间链路测距,进行卫星在轨星历改进,致使用户可达测距精度有了显著提高;2008年12月21日,对28颗在轨GPS工作卫星的用户测距误差(URE)统计表明,它们的最大值为1.81m,最小值是0.05m,平均值为0.523m。
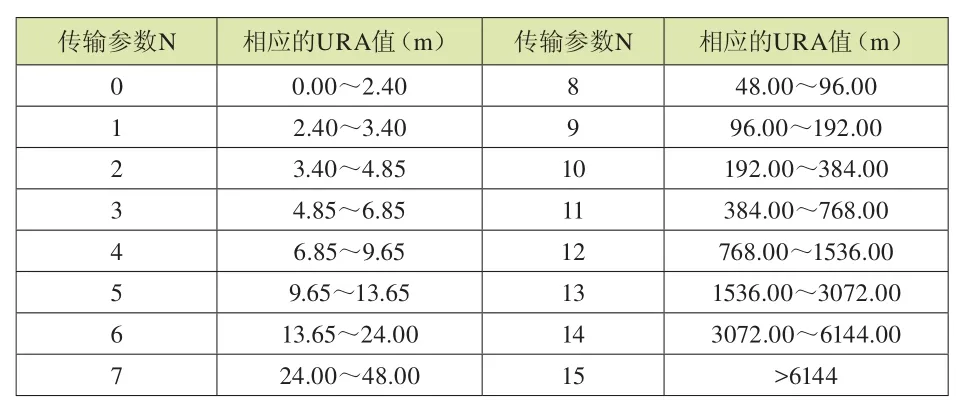
表2 传输参数N与用户可达测距精度(URA)
研究表明,GPS卫星七天的全球用户测距误差(UREG)定义为

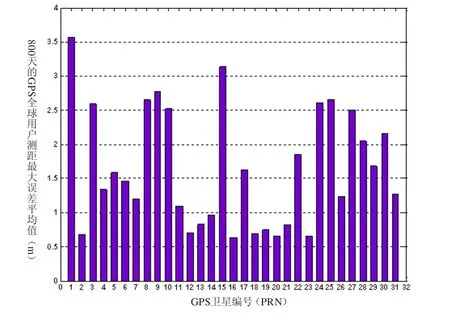
图7 800天的GPS全球用户测距最大误差平均值(m)
式中,△tcolck为七天的卫星时钟误差;△Pradial为七天的卫星位置径向误差;△Pcross为七天的卫星位置法向误差;△Pdown为七天的卫星位置切向误差。

图8 GPS卫星的用户测距误差逐年减小
2.3.2 电离层时延改正Tgd
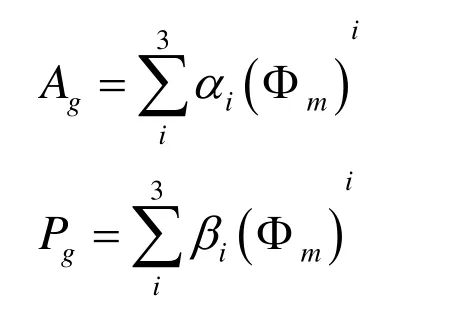
第7字码的第17~24比特表示L1-C/A码和L1-P码伪距测量的电离层时延改正(Tgd),它采用Klobuchar电离层时延改正模型。该模型的基本点是,夜间的电离层时延稳定不变,且恒为5ns;而白天电离层时延改正的最大值,出现在当地每天的14:00;余者的变化规律是如下式所述的余弦函数:

式中,
2.3.3 星钟数据龄期AODC
第3字码的第23和第24比特,以及第8字码的第1~8比特,均表示卫星时钟的数据龄期AODC。GPS试验卫星的AODC只占8个比特,而GPS工作卫星却扩展到了10个比特。AODC是时钟改正数的外推时间间隔,它向用户指明对卫星时钟改正数的置信度,且知

式中tOC为第一数据块的参考时刻;tL是计算时钟参数所作测量的最后观测时间。
2.3.4 卫星时钟改正
GPS系统采用了GPS星期和GPS时间系统(时系),WN表示从1980年1月6日子夜零点(UTC)起算的星期数,即GPS星期数。GPS时系是以地面监控系统主控站的主(原子)钟为基准的连续时间尺度。由于UTC时间尺度的跳秒和主控站主钟的不稳定性,GPS时间和UTC时间之间存在着变化差值,它由地面监控系统予以监测,其大小用导航电文播发给广大用户。1990年6月,GPS时间较UTC时间提前了6s左右。
卫星时钟改正,是每一颗GPS卫星的时钟相对于GPS时系的差值。由于相对论效应,卫星时钟比地面时钟走得快,每秒约差448微微秒(每天相差3.87×10-5s)。为了消除它的影响,而将卫星时钟的10.23MHz之标称频率减小到10.22999999545MHz的实际频率。虽经过这种改正,但相对论效应所产生的时间偏移并非常数,对于某一颗给定偏心率e的GPS卫星,一阶相对论效应改正如下式所示:

式中,



表3 卫星时钟的A系数

图9 800天的GPS星钟最大误差平均值(m)
此外,各颗卫星时钟相对于GPS时间系统的偏差误差,也需加以改正,其值为

式中,a0为相对于GPS时系的时间偏差(钟差);a1是相对于实际频率的偏差系数(钟速);a2为时钟频率的漂移系数(钟速变化率,即钟漂)。这些系数分别由第9字码和第10字码给出,详见图6。表3列出了几种类型的时钟多项式系数向量A,这三个时钟多项式系数a0a1a2总称为时钟参数;且知GPS工作卫星的钟差和钟速最小,铯钟优于铷钟。根据每颗卫星的时钟改正△ts和一阶相对论效应改正△tR,则可将每颗卫星的时间(tS)化算为统一的GPS时间:

各颗卫星的GPS时间,还可依据卫星导航电文提供的相关参数,化算成UTC时间。图9是800天的GPS星钟最大误差平均值。从图7和图9可见,GPS卫星PRN1的星钟误差和全球用户测距最大误差平均值都比较大,因此,依式(3)算得的用户测距误差就比较大。这说明,全球用户测距误差(UREG)的定义是正确的。
GPS卫星全球定位系统,采用GPS时间系统和GPS星期;GPS时间相对于世界协调时(UTC)的差别,由GPS导航电文给出。自1980年1月6日以来,GPS星期已进入了第二轮,详述如下:

当GPS周数变换后(1999年8月22日),所用的GPS信号接收机及其相应的数据处理软件,均应立即作出GPS周数变换调整;否则,GPS信号接收机将发生计算粗差,甚至拒绝定位计算。
第二数据块是由第二和第三子帧共同构成的,它给出GPS卫星的星历,这是GPS卫星为导航定位应用发送的主要电文。特别指出的是,GPS卫星导航电文提供的星历数据,是一种外推的轨道参数,其精度不仅受到外推计算时卫星初始位置误差和速度误差的制约,而且随着外推时间延长而显著降低。第三数据块是由第4和第5两个子帧构成的,它提供GPS卫星的历书数据,后者是第一和第二数据块的简略形式,当接收机捕获到某颗GPS卫星后,利用第三数据块提供的其他卫星的概略星历、时钟改正、码分地址和卫星工作状态等数据,用户不仅能选择工作正常和位置适当的卫星,以致它们能够构成较理想的空间几何图形,而且依据已知的码分地址能够较快地捕获到所选择的待测卫星。第二、三数据块见参考文献[1]。
3 北斗卫星的导航电文
北斗卫星的导航电文,分成I支路导航电文和Q支路导航电文;根据不同的速率和结构,又分为D1(50b/s)导航电文和D2(500b/s)导航电文,而且在D1码上调制着二次编码(1kb/s)信息。不同的北斗卫星播发的导航电文速率如表4所示,表5则为I支路的导航电文内容。

表4 北斗卫星播发的导航电文速率
D1码导航电文由超帧、主帧、子帧和字码组成(如图10所示)。每个超帧为36 000bits,历时12分钟,每个超帧包括24个主帧(24个页面);每个主帧为1 500bits,历时30s,每个主帧由5个子帧组成;每个子帧为300bits,历时6s;每个子帧包括10个字码,每个字码为30bits,历时0.6s。每个字码由导航电文数据及其校验码两部分组成。其中每个子帧第一个字码的前15bits信息不进行纠错编码,后11bits信息采用BCH(15,11,1)加交织方式进行纠错编码,因此只含一组BCH码,信息位共有26bits;其他9个字码均采用BCH(15,11,1)加交织方式进行纠错编码,每个字码30bits含两组BCH码,信息位各有22bits。

表5 I支路的导航电文内容
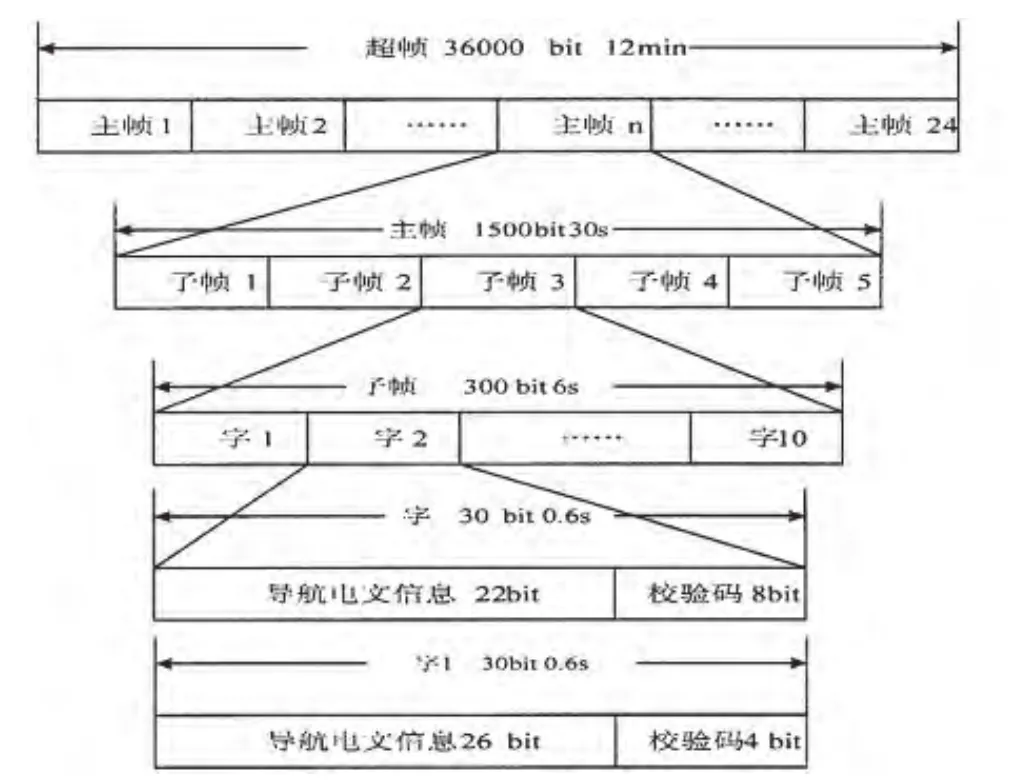
图10 D1(50b/s)的导航电文构成
D1码导航电文的主要内容是基本导航信息,它由下列信息组成:本星导航信息(周内秒计数、整周计数、用户距离精度标志、卫星钟自主健康信息、电离层模型改正参数、卫星星历参数及其数据龄期、卫星钟参数及其数据龄期、星上设备时延差)、全部卫星历书、以及与其他系统(UTC、军用时频系统、其他卫星导航系统)的时间同步信息。整个导航电文需要12分钟时间才能够传送完毕,电文内容每小时更新一次。
图11是MEO/IGSO卫星I支路D1码主帧电文结构与信息内容。从该图可见,子帧1~3发送基本导航信息;子帧4~5的信息内容由24个页面分时发送,其中子帧4的页面1~24和子帧5的页面1~10发送全部卫星历书以及与其他系统的时间同步信息;子帧5的页面11~24为预留页面。

图11 MEO/IGSO卫星I支路D1码主帧电文结构与信息内容
D2导航电文由超帧、主帧和子帧组成。每个超帧为180 000比特,历时6分钟,每个超帧由120个主帧组成,每个主帧为1 500比特,历时3秒,每个主帧由5个子帧组成,每个子帧为300比特,历时0.6秒,每个子帧由10个字码组成,每个字码为30比特,历时0.06秒。每个字码由导航电文数据及校验码两部分组成。每个子帧第1个字码的前15比特信息不进行纠错编码,后11比特信息采用BCH(15,11,1)方式进行纠错,信息位共有26比特;其他9个字码均采用BCH(15,11,1)加交织方式进行纠错编码,信息位共有22比特。D2导航电文包含基本导航信息和增强服务信息。D2导航电文包括:本卫星基本导航信息,全部卫星历书,与其他系统时间同步信息,北斗系统完好性及差分信息,格网点电离层信息。子帧1播发基本导航信息,由10个页面分时发送,子帧2~4信息由6个页面分时发送,子帧5中信息由120个页面分时发送。为了节省篇幅,此处不予以详述。
4 Galileo卫星导航电文
在Galileo导航定位解算中,Galileo卫星的在轨位置,是作为一种动态已知点参与解算的;该动态已知点是从Galileo卫星导航电文获得的。2006年5月23日,欧洲空间局(ESA)首次公布了Galileo开放服务(OS)空间信号的接口控制文档草案,称之为GAL OS SIS ICD/D.0;2010年4月13日,正式发布了Galileo开放服务空间信号接口控制文档(Galileo OS SIS ICD);2010年9月,发布了Galileo开放服务空间信号接口控制文档1.1版本。根据这个ICD文档,Galileo卫星发送三种导航电文:F/NAV自由接收的导航电文;I/NAV完好性导航电文;C/NAV商用导航电文。此处仅对F/NAV自由接收的导航电文做出简要介绍。
图12是Galileo卫星F/NAV自由接收的导航电文的结构和I/NAV完好性导航电文的结构(在“Galileo OS SIS ICD, Issue 1.1,September 2010”中没有提供C/NAV商用导航电文的结构),由图12A可见,F/NAV电文是由主帧、子帧和页面构成的,1个主帧包括12个子帧,需要10分钟才能够发送完毕。它发送四种导航数据:Galileo卫星星历、Galileo卫星历书、时间和卫星时钟改正参数以及导航服务参数。表6列述了所发送的Galileo卫星星历参数;如何利用星历参数计算Galileo卫星的在轨位置。

图12A Galileo卫星F/NAV自由接收的导航电文的结构
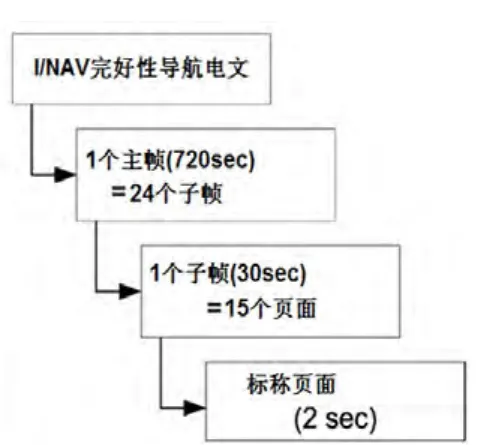
图12B Galileo卫星I/NAV完好性导航电文的结构
表6所述的星历参数,实际上是由Galileo卫星开普勒(Johannes Kepler)6参数、轨道摄动9参数和时间参数等三类参数构成。Galileo卫星开普勒6参数是卫星轨道长半轴的平方根、卫星轨道偏心率e、参考时刻toe的轨道倾角i0、参考时刻toe的升交点赤经Ω0、近地点角距ω和参考时刻toe的平近点角M0。轨道摄动九参数是:①卫星平均运动角速度与计算值之差△n,或称△n为平近地点角速度的改正数,它是近地点角距ω摄动量(dω/dt)中的长期漂移项,起因于二阶带谐系数(C20),及其平滑间期内的日月引力摄动和太阳光压摄动;②升交点赤经的变化率(Ω-dot),它是升交点赤经(Ω)摄动量(dΩ/dt)中的长期漂移项,起因于二阶带谐系数(C20)和极移影响;③轨道倾角的变化率i-dot;④起因于二阶带谐系数(C20)和高阶带谐系数的短周期项影响以及月球引力和其他摄动力的摄动影响的Cus,Cuc,Crs,Crc,Cis,Cic。
当依据上述星历参数计算出Galileo卫星的在轨位置后,便可与所测量的站星距离联合解算出用户的实时点位,其测量精度随着服务类型不同而异,详如表7所示,由该表可知,用Galileo E1信号的单频测量的二维位置精度为±15m,用Galileo E1+E5A信号的双频测量的二维位置精度为±4m,而高程精度为±8m,这可满足航空航天业务的一般应用。

表6 Galileo卫星F/NAV电文轨道参数及其长度

表7A Galileo不同服务的测量精度

表7B Galileo守时精度和校频精度
在Galileo卫星导航电文中,导航服务参数是值得我们特别关注的,它包括下述内容:
(1)卫星标识符,它通过1组6bit的二进制数来表示Galileo星座中的卫星。
(2)数据期号(IOD),它用于向用户播发数据的有效性,能够保证用户在接收不同的Galileo卫星信号时数据的连续性,它在所有的页面类型当中都进行播发,其中在页面类型1,2,3,4中被编码为10bit的二进制数,在页面类型5,6当中被编码为2bit的二进制数。
(3)导航数据有效性参数,该参数被编码为1bit的二进制数,用于指示数据的有效性状况,当其为“0”时,表明数据有效,当其为“1”时,表明此时数据的有效性得不到保证。
(4)信号健康状况参数,该参数被编码为2bit的二进制数,用于表示信号的健康状况,其含义是,“0”表明信号正常,“1”表明信号异常,“2”表明信号将要出现异常,“3”表明信号状况目前正在测试之中。
值得一提的是,Galileo卫星还具有全球搜寻援救(SAR)功能,能够接收和处理来自遇险用户的求援信号,实施及时援救。现已发射的4颗Galileo IOV卫星(MEO),均安置了全球搜救收发设备,以便验证Galileo SAR功能。Galileo SAR功能是充分利用COSPAS/SARSAT全球卫星搜救系统的地面援救网络,进而对用户搜救示位标引入高精度的Galileo E1信号定位测量,其二维定位精度可达到±15m,高程测量精度为±35m,两者的置信度均为99.5%,而且能够向遇险用户发送信号,告知其所处险境已被探测到,其救援工作已在积极进行中。2013年3月,欧空局用4颗在轨Galileo IOV卫星导航信号的仿真试验结果表明,77%的模拟遇险用户可达2公里范围内的救援定位,而95%的模拟遇险用户可达5公里范围内的救援定位。Galileo任务控制中心能够在一分半钟内检测到所有的报警用户,这高于10分钟检测到所有报警用户的设计要求。
5 结束语
本文概论了GPS,GLONASS,Galileo和北斗卫星的导航电文,为读者详细解读这四大系统的卫星导航电文打开了便捷之门。且知四大系统的卫星导航电文主要分成两大类型;即GLONASS卫星发送导航卫星的在轨三维坐标和运行速度/加速度的“在轨坐标式”,GPS卫星/Galileo卫星/北斗卫星发送导航卫星的开普勒轨道及其摄动参数的“轨道参数式”。两类卫星导航电文各有特色,但是,“轨道参数式”应用了多种参数,这既有利于卫星导航电文的发送纠错,又便于导航卫星实时在轨位置的精确解算。因此,笔者认为,采用“轨道参数式”编制卫星定位电文是适宜的。正如“卫星导航电文是GNSS的导航灵魂”一文(《数字通信世界》,2014年第2期)所述,卫星导航电文主要包括获取、定位、改正、导测和辅助等电文;对于GNSS信号接收机的研制者而言,应该充分利用卫星导航电文提供的信息,研制出价廉物美而具有高精度的产品;这就需要精细解读各类导航卫星的导航电文。为此,本文做了入门之论。
[1] 刘基余.GPS卫星导航定位原理与方法.北京:科学出版社,2014年1月
[2] GPS IS-GPS-200 Revision D 7 December 2004
[3] GLONASS ICD Navigational radiosignal In bands L1/L2(Edition 5.1)2008.
[4] Galileo OS SIS ICD, Issue 1.1,September 2010
[5] 北斗卫星导航系统空间信号接口控制文件公开服务信号[BDS-SISICD-2.0(2013.12)]
