地面激光雷达用于既有铁路危岩调查的应用实例
2014-07-25王俊
王 俊
(中铁第四勘察设计院集团有限公司,湖北武汉 430063)
地面激光雷达用于既有铁路危岩调查的应用实例
王 俊
(中铁第四勘察设计院集团有限公司,湖北武汉 430063)
以我国建设难度最高的宜昌至万州铁路沿线高危路段的隧道出入口作为调查对象,采用无接触测量手段,使用地面激光雷达对危岩悬崖进行观测及数据采集,并对采集的点云数据及影像数据进行处理分析,得到调查对象的数字高程模型及三维真彩色模型。根据用户需求,提供纵断面、隧道地形、危岩位置等成果数据。
宜万铁路 无接触测量 地面激光雷达 三维建模 断面生成
1 项目概况
宜万铁路东起湖北宜昌,西至重庆万州,全长约377 km,是我国迄今为止施工难度最大、每公里造价最高、历时最长的山区铁路。
铁路沿线绝大部分区域为喀斯特山区地貌,另外还遍布各种复杂、危险、不稳定的地质环境。
本线路的设计时速最高达160 km,在如此复杂的山区环境中属罕见。为保障列车的安全行驶,必须对全线有危岩落石可能的区域进行测量及调查工作。由于全线桥隧比达到74%,隧道洞口均为悬崖峭壁,传统测量手段无法保证安全,故采用无接触测量的方式进行测绘工作,选用的仪器为地面三维激光扫描仪,配套软件为专业点云数据处理软件Riscan Pro及TerraSolid。
2 激光测距原理及仪器介绍
2.1 地面激光雷达测量原理
激光扫描技术是近年来新兴的一种测量手段,采用非接触式的测量方式,改以往的点测量为面测量,以点云的形式高精度地获取地形、地物、复杂物体表面的三维数据模型。
根据扫描仪载体的不同分为机载、车载和地面三种,其中地面激光雷达的测量效率最低,但相对精度最高。
地面激光扫描仪主要分为脉冲式和相位式两种,其原理分别是计算光波在空气中运行的时间或者整数波长的个数来反算出光束在空气中运行的距离,即可得到出发点(仪器对中点)到目的点(被测目标)的距离。相对于全站仪无棱镜测量方式,地面激光雷达的优势不在于测量精度,而是超高的测量速度。
2.2 测量仪器简介
本项目使用的是奥地利Riegl公司生产的VZ400地面激光扫描仪。
该设备主要参数如表1。

表1 VZ400主要参数
(1)实际测量中可采用高速模式或远距模式,其中高速模式测量距离为350 m,远距模式为600 m。
(2)水平及垂直最低角度步频率为0.002 4°,在100 m处点间隔为4 mm。
(3)高速模式为300 kHz,远距模式为100 kHz。
(4)单点测量精度为5 mm,重复测量精度为3 mm。
(5)垂直范围为-40°~+60°,水平转动无死角。
3 外业数据采集
3.1 隧道口测量
以榔坪二号隧道出口为例,隧道口侧悬崖高150 m,由于仪器的垂直扫描角向下不大于40°,向上不大于60°,为了扫描过程中包含所有采集区域,设站点必须远离悬崖,如图1所示。仪器设置于靠近榔坪三号隧道入口处,最大测量距离不大于350 m,所以采集时可选取快速扫描模式,扫描时间约20 min,即可获得整个悬崖的点云数据。悬崖上方还有约200 m长缓坡,坡度约40°,属于落石高危区域。由于角度关系,设站点1无法获得缓坡数据,需要将设站点移至悬崖对面的坡顶,设站点2距离缓坡顶部较远,已超过350 m,超出高速采集模式的测距限制,需要开启远距模式。在该模式下,采集速度较慢,整个扫描过程持续约1 h,两个场景的扫描数据可后期无缝拼接。
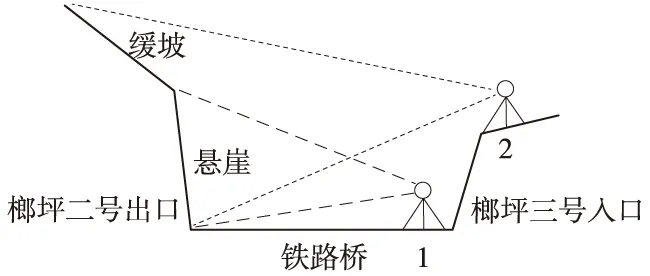
图1 悬崖扫描示意
3.2 路堑测量
除隧道口悬崖外,本项目还采集了几处有危岩落石可能的路堑,以沙坪隧道路堑为例:
路堑一般延伸距离较长,如果测距超过350 m将无法使用高速模式,采集时间加长;同时扫描角度过小将会造成由遮挡带来的信息丢失。故可根据实际情况增加测站数量,如条件允许,在测站间的重叠地带贴上激光反射靶标,以方便内业拼接(如图2)。

图2 路堑扫描
4 内业数据处理
4.1 坐标转换及定向
三维激光扫描仪扫描的点云数据都在其自定义的扫描坐标系中,如果数据的后处理要求得到大地坐标系下的数据,这就需要将扫描坐标系下的数据转换到大地坐标系下,这个过程就称为三维激光扫描仪的定向。 在坐标转换中,设立特制的定向识别标志,即激光反射标靶。通过计算标靶中心坐标,采用公共点坐标转换,求得两坐标系之间的转换参数,将点云数据全部转换至设计坐标系中。
4.2 场景拼接
一般情况下,一个对象的扫描都会由一个以上的扫描场景组成,每个场景获得的点云数据都是以该设站点为中心的坐标,通过坐标转换,将每个场景的坐标统一到同一个坐标系下,再通过连接点的位置坐标将数个场景的点云拼接到一起。
4.3 点云后处理
点云拼接后会形成一个庞大的数据文件,并包含大量冗余数据,需要对该文件进行处理。根据激光测距的原理可知,激光束在碰到地物时会形成反射,返回接收器后即可获得该地物的三维坐标,如果此地物的面积小于激光束的光斑,光束还会继续行进,直至碰到下一个可反射光线的地物,如此反复,对应于一束发射光线,接收仪将会得到多于一束的反射光线。而往往前几次反射是照射到植被产生的,这些数值不能代表地表的坐标,必须进行剔除。通过点云处理软件和部分人工处理,将植被引起的反射值移除,使点云数据尽量接近真实地表。处理过的点云可通过软件(Riscan Pro,Terrasolid)生成数字高程模型(DEM),通过DEM可根据用户需求获得数字地形图,横、纵断面等数字产品。
4.4 纹理贴图与地物辨识
在工程上,用户关心的不仅仅是断面线的形状,同时还有断面线所穿过地物的位置、性质、属性。要获得这些信息,就必须将地物的数字高程模型与高分辨率的彩色照片相叠加。本项目的扫描仪可搭载高精度、低畸变的专业单反数码相机,通过软件,根据数码相机获得的彩色照片,将点云数据中的每个点都赋予RGB三色,即可快速生成一个高分辨率的贴图纹理模型,建立像照片一样真实的三维模型。
通过断面线与三维真彩色模型相结合,即可获得断面线经过地物的各项属性,如图3。

图3 断面成果数据
5 结束语
高速铁路的特殊性质决定了无接触测量才是最佳、最安全的测量方式,无论是隧道洞口的地形测量、地质灾害多发地区的灾情预测,还是铁路沿线的常规运营监测,三维激光雷达集作业安全、采集效率、测量精度于一身,在不远的将来将会逐渐取代常规测量方法,与机载、车载激光雷达相结合,可以获得完整的高速铁路勘测设计、运营维护的解决方案。
[1] 董洪波.高精度全站仪在涟水特大桥二等跨河水准中的应用分析[J].铁道勘察,2013(2)
[2] 徐幸福.基于沪杭高铁运营维护监测的技术设计研究[J].铁道勘察。2012(6)
[3] 简骁,童鹏.基于地面激光雷达技术的隧道变形监测方法研究[J].铁道勘察,2011(6)
[4] 陈永奇.工程测量学[M].北京:测绘出版社,1995
[5] 中铁二院.铁路工程测量规范[S].北京:中国铁道出版社,2010
[6] 孔祥元,郭际明,刘宗泉.大地测量学基础[M].武汉:武汉大学出版社,1998
[7] 王晏民,胡春梅.一种地面激光雷达点云与纹理影像稳健配准方法[J].测绘学报,2012,41(2)
TheSurveyofUnstableRockITIaSSforExistingRailwaywith3DLaser-Scanner
WANG Jun
2014-10-14
王 俊(1978—),男,2008年毕业于德国斯图加特技术应用大学测绘工程专业,硕士,工程师。
1672-7479(2014)06-0015-02
P258
: B
