渝黔铁路天坪特长隧道GPS建网及横向贯通误差预计
2014-07-25吕宏权
刘 斌 吕宏权
(中铁隧道集团一处有限公司,重庆 401121)
渝黔铁路天坪特长隧道GPS建网及横向贯通误差预计
刘 斌 吕宏权
(中铁隧道集团一处有限公司,重庆 401121)
介绍天坪特长隧道GPS建网的网形设计原则、数据的采集和处理,对长基线的删减、约束点的稳定性及观测质量进行分析,阐述了GPS控制网影响隧道横向贯通的主要因素,并估算了天坪特长隧道的最大横向贯通误差。
特长隧道 GPS 控制建网 贯通误差 预计
渝黔铁路扩能改造工程天坪隧道长13.978 km,为单洞双线铁路隧道。隧道正洞设有进口、出口,1个斜井、3个施工作业工点。全线由北向南,多为高山、丘陵地区,海拔高度多在700~900 m之间。区内主要交通道路为210国道、乡村道路及田间机耕路,沟渠坑塘密布,控制点间通视条件较差。进口位于凤梅崖南侧山腰,斜井位于凤梅崖北侧天坪乡,出口地形复杂且距斜井较远,采用常规测量建网方法难度大,且工作效率低、费用高、建网精度较差。针对天坪隧道实际情况,决定采用GPS定位测量来建立该隧道施工的洞外平面控制网。
1 长大隧道GPS平面控制建网
随着GPS技术的发展,现在长大隧道的平面控制测量大都采用GPS静态定位模式。对于单一大型结构物,采用GPS静态定位精度高、控制网图形结构简单、易施测,平面控制的观测值成果精度和质量可靠性能够得到保证。
1.1 长大隧道GPS建网要求
长大隧道进行GPS平面控制网施测前应进行控制网设计,根据结构物长度、规范规定,结合测区实际情况,以环形网结构进行同步环观测,施测的环路之间以接边或接网的形式扩网,从而形成封闭式的整体GPS观测网;网形设计时注意结构物两端的控制点间相对精度、高程面位置和通视情况。
1.2 天坪隧道GPS建网设计
天坪隧道总长度约14 km,隧道施工除进出口外,中部设有1个斜井、3个施工洞口,场地较为狭窄,地势变化复杂。根据隧道地形特点和施工情况,隧道进口布设了4个控制点,斜井3个,出口5个,每个洞口至少保证主要控制点两方向通视,以确保采用常规仪器进行洞内施工引测,GPS构网控制点见图1。

图1 GPS控制点构网示意
平面控制网的设计符合《高速铁路工程测量规范》规定[1],设计精度为高铁二等GPS控制网,基本技术指标见表1。为保证卫星信号的质量,测站周围应保证视野开阔、地质条件良好、高度角15°以上、无障碍物等;为减少垂线偏差对方位传递的影响,各洞口的主要进洞方向点位选在基本同一高程面上。
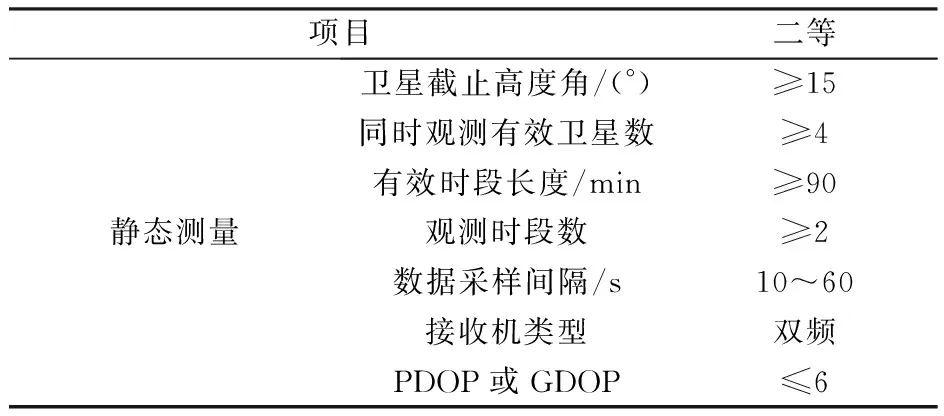
表1 高铁二等GPS测量作业的基本技术要求[1]
2 天坪隧道GPS数据采集和质量分析
2.1 控制网施测
天坪隧道GPS平面控制网施测,采用12台标称精度为±(3+0.1×10-6D)mm的天宝R8双频接收机,对各洞口共计12个GPS点进行同步观测,形成多个整体的三角形或大地四边形控制网,同时也可以消除仪器搬站对中误差,增加数据检核条件,提高工作效率。外业观测过程中,采用新型徕卡内置光学对点器的精密整平支架(见图2),任意方位旋转都能严格对中,确保对中误差不大于1 mm;天线高在开机前后各量取一次,任一方向上在观测前、后两次量取的天线高误差不大于±2 mm;每一同步观测2个时段,每个时段观测结束后,重新安置仪器,将基座转动并升降三脚架,再对中、整平。

图2 对点器精密支架

图4 GPS控制网长基线删除前
2.2 数据质量分析
(1)数据处理方法
GPS数据处理采用随机软件TBC进行观测数据基线解算,然后利用Cosa GPS 6.0平差软件进行无约束平差、约束平差、精度分析及成果输出工作,数据处理流程图如图3所示。
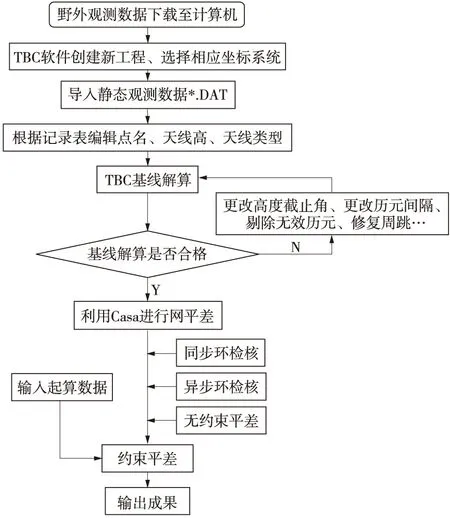
图3 GPS数据处理流程
在铁路GPS控制网布设过程中,由于线路的走向原因GPS控制网必为带状图形,且在长大隧道控制网方面施工工点位置GPS点布设相对较密,这样就容易造成GPS控制网中控制点间部分边长长度过于悬殊,在数据处理、同步环检核过程中,由于长边的系统误差比短边系统误差要大许多,从而导致长边绝对精度要比短边低很多,这样在整个控制网平差过程中将影响控制网的整体精度。由于所有点同时观测,导致采集的数据全、检核条件多。为提高控制网的整体精度,数据处理时,采用删减长基线的方法来消弱长边对于控制网精度的影响,如图4、图5所示。
(2)数据质量分析
天坪隧道GPS控制网共12个GPS点,其中4个CPI起算点。基线解算采用天宝TBC软件按静态相对定位模式进行,采用广播星历,多基线向量的双差固定解求解模式。删除工作状态不佳的卫星数据,删除残差过大且有明显系统误差的时间段,不让其参与平差,同一时段观测值的数据剔除率小于10%。具体要求如下。

图5 GPS控制网长基线删除后
①基线向量环闭合差
在解算出每一时段的基线向量后,以三角形作为构环图形,并计算闭合环坐标分量闭合差,网闭合环精度指标见表2。各坐标分量及全长闭合差应符合下式规定:

式中:n为闭合环边数(n=3),δ为GPS基线向量弦长中误差/mm。

表2 网闭合环精度统计
②重复基线较差


表3 重复基线统计
3 GPS网数据平差处理
3.1 约束点稳定性分析
网平差处理前,采用一点一方向计算法进行约束点的稳定性分析(见表4)。
从表4看出,约束点间相对精度均高于1/25万,可以作为约束点对GPS网进行平差。

表4 约束起算点稳定性分析 m
3.2 平差处理
(1)三维无约束平差

三维无约束平差最弱点、边精度统计如表5、表6(单位权中误差=1.220 cm)。

表5 最弱点精度统计 cm

表6 最弱边精度统计
(2)二维约束平差
约束平差前,先进行起算点的稳定性检验,约束点间的边长满足相对中误差<1/250 000的要求时,可以作为约束平差的起算基准。约束平差采用的起算点应分布在网的两端均匀分布。
约束平差中基线向量各分量改正数与无约束平差同一基线改正数较差的绝对值应满足下式要求:dVΔx≤2σ,dVΔy≤2σ,dVΔz≤2σ,约束平差后GPS控制网的精度指标应满足基线边方向中误差≤1.3″,最弱边相对中误差≤1/180 000的要求。
二维约束平差最弱点、边精度统计如表7、表8(单位权中误差=0.375 cm)。

表7 最弱点精度统 cm

表8 最弱边精度统计
从表7、表8中的精度统计看,最弱点的点位精度、最弱边距离相对中误差完全满足规范精度要求,且全网各边的方位角中误差均小于±0.6″,利于隧道横向贯通误差的控制。
3.3 平差后成果数据检核
按照常规测量方式,采用标称精度为0.5″,±(0.6+1×10-6D) mm的徕卡TM30全站仪,对各洞口主要GPS点位进行角度与边长观测,通过全站仪观测数据与GPS数据处理平差坐标反算值进行对比检核。以斜井GPS点为例,检核数据见表9。

表9 距离、角度对比
由表9可以看出,全站仪测量数据与GPS坐标反算数据相吻合,该GPS控制网平差合理。
4 GPS隧道控制网横向贯通误差计算
4.1 GPS控制网对隧道横向贯通的影响因素
隧道洞内测量采用导线控制测量,使得洞外控制点的精度通过导线测量的方式传递至贯通面,洞外GPS控制网对隧道横向贯通的影响因素主要通过以下两方面体现:
①进、出洞控制点点位误差。GPS定位技术能直接测定两点间的相对位置,区别于传统的角度与边长的测量方式,GPS隧道贯通误差的因素主要是由进、出口控制点的点位误差引起。由图4可知,进洞点分别为J2-1、CPX-3、CK1,其点位误差分别记为MJ、MX、MC。
②进、出洞口定向边长和方位角。进口、斜井、出口进洞后视点分别为CPI54、CPX-2、CPI56,后视定向边的边长及方位角分别为SJ、SX、SC和αJ、αX、αC,后视定向边和方位角误差分别为MSJ、MSX、MSC和MαJ、MαX、MαC。
GPS控制网对贯通面处的横向贯通误差影响值为(设P为贯通面)
(1)
4.2 天坪隧道GPS网横向贯通误差估算
天坪隧道进口与斜井、斜井与出口共两个贯通面,对于进口至斜井贯通面:



式中MαJ1-J2、MαX1-X2为进口与斜井后视边的方位角中误差,MJ2、MX2为用于后视点的点位中误差,SJ1-J2、SX1-X2为进口与斜井定向边边长,SJ1-P、SX1-P为进洞控制点到贯通面P的垂直距离。
表10、表11为天坪隧道进洞控制点精度统计。

表10 进洞点点位中误差统计 mm

表11 进洞定向边精度统计
按规范[1]规定,洞外两贯通面允许的横向贯通中误差限差均为±40 mm,利用公式(1)估算出进口与斜井、斜井与出口的最大横向贯通理论中误差分别为±2.8 mm与±8.3 mm,从以上的最大横向贯通中误差估算结果可以看出,由天坪隧道GPS控制网引起的进口与斜井、斜井与出口隧道横向最大贯通误差均优于规范限差。本次建立的GPS隧道控制网精度较高,完全满足该隧道施工要求。
5 结论
天坪隧道GPS建网在外业控制网的布设、测量方案的选取、内业数据处理等各个方面精细控制,把控每一步细节来提高控制网精度,合理建网,保障隧道施工。
高相对精度的GPS控制网保障了隧道洞外横向贯通误差,较小的洞外横向贯通误差给洞内横向贯通误差预留了较大空间,为隧道的顺利贯通打好了基础。
[1] TB10601—2009高速铁路工程测量规范[S]
[2] 国家测绘局.GB/T18314—2009全球定位系统(GPS)测量规范[S].北京:中国标准出版社,2009.
[3] 陈新焕.铁路隧道GPS施工控制网的建立[J].铁道勘察,1995(2)
[4] 王兵海.长大曲线隧道GPS平面控制测量方法[J].铁道勘察,2009(5):24-26
[5] 刘仁钊,刘延明.精密工程测量控制网的建立方法[J].科技创新导报,2007(6)
[6] 杨友涛,刘成龙.北天山隧道施工GPS控制网的建立及其贯通误差预计[J].四川测绘,2006(9)
[7] 李征航.实用GPS数据处理教程[M].武汉:武汉大学出版社,2009
[8] 魏二虎,黄劲松.GPS测量操作与数据处理[M].武汉:武汉大学出版社,2004
[9] 刘大杰,施一民,过静珺.全球定位系统的原理与数据处理[M].上海:同济大学出版社,2001
TheestablishofGPScontrolnetworkandtheestimateoftransfixionerrorfortheTianpingtunnelrailwayproject
LIU bin LV Hong-quan
2014-08-05
刘 斌(1987—),男,2010年毕业于长安大学测绘工程专业,助理工程师。
1672-7479(2014)05-0019-04
P228
: B
