弹目相对运动特性加载技术框架初探*
2014-07-25
(92941部队93分队 葫芦岛 125000)
弹目相对运动特性加载技术框架初探*
何洋冯楠
(92941部队93分队 葫芦岛 125000)
目前在靶场如何开展导引头抗干扰内外场联合试验已经成为急需解决的课题,其中弹目相对运动加载技术是制约该课题发展的瓶颈。针对这个问题,研究了弹目相对运动特性加载技术,提出了弹目相对运动加载方案。目标模拟器产生的模拟目标与导引头在俯仰和方位上角度的相对运动,采用X-Y轴扫描器的方式来实现,模拟目标与导引头在距离上的相对运动采用距离拖引,外加多普勒频移的方式来实现。并介绍了一种目标模拟器的实现方法,上述探讨的方法对靶场进行弹目相对运动特性加载工作具有一定的指导意义。
弹目相对运动;抗干扰;X-Y轴扫描器;目标模拟器
ClassNumberTN973
1 引言
目前导引头的仿真试验大多属于纯数字仿真试验,对于目标海背景环境一般通过目标模拟器的海杂波模拟来实现,但模拟出来的海杂波不够真实,很难满足试验结论的置信度水平,并且每进行一次弹载导引头飞行试验将耗费大量的资源和经费,严重加大了导引头的研制时间和费用。所以需要在靶场建设一个内外场联合试验平台,可以实现用真的导引头模拟进行飞行试验[1],敏感真实海背景下的模拟目标或真实目标,并能将试验数据实时传回到内场实验室进行处理。其中为解决导弹的模拟飞行及导引头与模拟目标的相对运动,弹目相对运动特性加载技术成为该试验平台的一项关键技术。国防科技大学已成熟掌握了该关键技术,成功设计出弹目相对运动特性加载系统并应用于各项仿真试验中,本文在学习国防科技大学的设计基础上,研究分析如何在靶场实现弹目相对运动特性加载。
2 弹目相对运动特性加载方案
弹目相对运动特性加载通过以下两个方面共同来实现:
1)通过三轴转台来模拟导引头载体(导弹)的飞行姿态;
2)通过导引头与目标模拟器之间的相对运动,来模拟导弹的飞行和弹目的相对运动:
(1)目标模拟器产生的模拟目标与导引头在纵向(俯仰)和横向(方位)上角度的相对运动,采用X-Y轴扫描器的方式来实现。
(2)目标模拟器产生的模拟目标与导引头在距离上的相对运动采用距离拖引,外加多普勒频移的方式来实现。
3 弹目相对运动特性加载系统
3.1 系统设计原理
图1为弹目相对运动特性加载系统的主要框架,现对此框架进行分析。
图1 弹目相对运动特性加载系统框架
该系统在真实海背景下放置于导引头正前方,目标模拟器通过自身的收发共用天线接收导引头的发射信号,从中提取载波信号并将此载波信号作为回波信号的载波,进行相关的信号处理后产生假目标回波信号。最后通过收发共用天线将目标回波信号发射给导引头,此过程中可在时域上通过有规律地改变目标回波信号的延迟时间(即距离拖引),并在频域上外加多普勒频率来实现假目标与导引头距离上的相对运动。X-Y轴扫描器中X轴导轨与Y轴导轨呈十字型放置,支撑柱固定于地面,X轴导轨大约8m长固定于支撑柱上,Y轴导轨大约2m长,置于X轴导轨的轨道上并通过伺服控制系统实现横向(方位)的左右快速移动,角速度ωx≥2°/s;目标模拟器的收发共用天线置于Y轴导轨的轨道上并通过伺服控制系统实现纵向(俯仰)的上下快速移动,ωy≥2°/s。以此来实现导弹的模拟飞行和弹目在角度上的相对运动。
3.2 X-Y轴扫描器放置位置
X-Y轴扫描器与导引头之间的距离取决于以下两个因素:
1)导引头方位跟踪范围的最大角度θ;
2)扫描器X轴的长度。
X-Y轴扫描器与导引头之间的位置关系如图2所示,距离L的计算公式如式(1)所示。
图2 扫描器与导引头之间的位置关系
(1)
式中:LX为X轴导轨全长的二分之一;θ为导引头方位跟踪范围的最大角度;L为X-Y轴扫描器与导引头之间的距离。
4 目标模拟器
目标模拟器的主要功能是产生一个包含目标特征信息的回波信号,并且能够对回波信号的延迟时间、功率幅度[2]和频率进行实时控制,以此来模拟真实环境中雷达导引头所接收到的目标的回波信号。模拟器能够实现的几个具体功能是[3]:
1)模拟弹目相对速度的变化;
2)模拟目标距离的变化;
3)模拟目标回波功率的变化;
4)模拟目标角度信息[4]的变化。
4.1 弹目距离上的相对运动
导引头与模拟目标之间的距离可通过导引头雷达发射和接收波形之间的延迟时间来计算,计算公式如式(2)所示:

(2)
式中:c为光速;tR为目标模拟器每次发射回波信号的延迟时间。
可通过有规律地改变目标模拟器每次发射回波信号的延迟时间来实现距离上的变化即距离拖引,从而达到弹目距离上相对运动的目的,这个距离上的变化量计算公式如式(3)所示:
(3)
式中:ΔR为距离变化量;ΔtR为目标模拟器前后两次回波脉冲延迟时间的变化量。
4.2 多普勒频移
在实际中弹目在距离上的相对运动会产生多普勒效应,所以目标模拟器发射假回波的发射频率必须加上这个多普勒频移,才能贴近实际情况。此过程的数学表达式如式(4)所示,取“加”号时表示模拟目标在靠近导引头;取“减”号时表示模拟目标在远离导引头。
f目=f导±fd
(4)
式中:f目为目标模拟器的发射频率;f导为导引头发射机发射频率;fd为多普勒频率:

(5)
式中:vr为导引头与模拟目标之间距离上的径向速度;λ为导引头发射信号的载波波长。
4.3 目标模拟器的具体实现
雷达目标回波信息可以从载频信息、速度信息、距离信息、功率信息、干扰信息等五个特征进行模拟。下面简单介绍一种目标模拟器的实现方法,其整体构成如图3所示。

图3 目标模拟器整体框图
4.3.1 载频信息实现
导引头目标模拟器产生的回波信号必须与发射信号保持良好的相干性,这就要求系统首先能够从发射信号中准确地提取载波信号,并将此载波信号作为回波信号的载波,为此,系统采用锁相环路设计。
1)锁相接收机前端配置有AGC(自动增益控制)模块,有效防止功率漂移对频率标定的影响,用于抑制接收信号电平的波动,为后级电路提一个比较稳定的电平,保证了系统内信号的稳定性。
2)锁相环(PLL)可以实现对中频信号频率的自动跟踪,并将其作为参考信号控制环路内部振荡信号的频率和相位,此设计可以使系统内信号频率和导引头发射频率保持一致。
3)主控电路通过控制电压改变压控振荡器(VCO)中电容的电容量,进而改变振荡回路谐振频率。压控振荡器一般具有极高的谐波抑制比和极低的信号杂散,产生的回波信号具备纯净的频谱特性,信号谐波与杂散一般小于-80dB。
4)频率标定部分是锁相环路设计的重点。它接收中频信号,测量该信号载波频率,根据测量结果确定反馈调整量,通过串口调节频率合成信号源输出频率。频率标定部分标定的频率精度,将影响锁相接收机最终能否锁定。
4.3.2 速度信息实现
对目标信号的多普勒频率及其变化进行模拟时,不仅要保证频率的灵活变化还要保证其变化过程中相位连续性。在实际工程中,常常用直接数字式频率综合器(DDS)来产生目标回波信号的多普勒频率,它所产生的回波信号的多普勒频率的稳定度好、相位噪声小而且精度很高,能够完全满足多普勒频率模拟的需要。DDS基本原理如图4所示。
图4 DDS原理图
图4中,相位累加器的作用是在系统时钟的控制下,把瞬时频率和相位的增量进行累加;然后,通过查询波形存储器ROM构成的正弦查找表,把由相位累加器输出的相位值转化成数字化输出的正弦波形幅度数据,再通过D/A变换转化成模拟信号,形成正弦信号的模拟输出波形。系统选用DDS芯片AD9854,AD9854是AD公司推出的一款高速高性能数字频率合成器件,内部集成了48Bit频率累加器、48Bit相位累加器、正余弦波形表、高速、高性能的正交D/A转换器以及调制和控制电路,能够在单片上完成频率调制、相位调制、幅度调制和IQ正交调制等多种功能[5]。在高稳定度时钟驱动下,能够计算出的多普勒频率值与频率变化率,产生正交双通道的基带多普勒信号。参考时钟选择100M高稳定度晶振[6]。另外,AD9854的相噪和杂散性能都较高。在模拟动目标径向加速度时,DDS能够很好地输出相位连续的线性调频信号。
4.3.3 距离信息实现
目标回波的距离信息通过时间延迟来体现,因此,本系统用数字射频存储器(DRFM)来模拟目标回波的距离延迟。DRFM在模数、数模变换过程中的信号损耗较小,并且体积小,价格适中;因此,能够满足目标模拟信号的质量要求。输入的射频信号先下变频到存储器工作的基带工作频带上,然后用高速的ADC对它进行采样,得到由二进制表示的离散量化数据,将这些采样数据按照控制器的安排存入到存储器中相应的存储单元,采集数据的长度受存储器的存储容量限制。当原始信号重放时,可按相反的过程进行,控制器按照以前存储时的顺序选择存储单元的地址,读出所需的数据流,再通过DAC转换成模拟信号,经过适当的滤波便可以获得原始的基带信号,然后用与下变频时同样的本振上变频到原来的射频,从而完成对原始输入信号的相参复制[7]。DRFM的工作原理如图5所示。
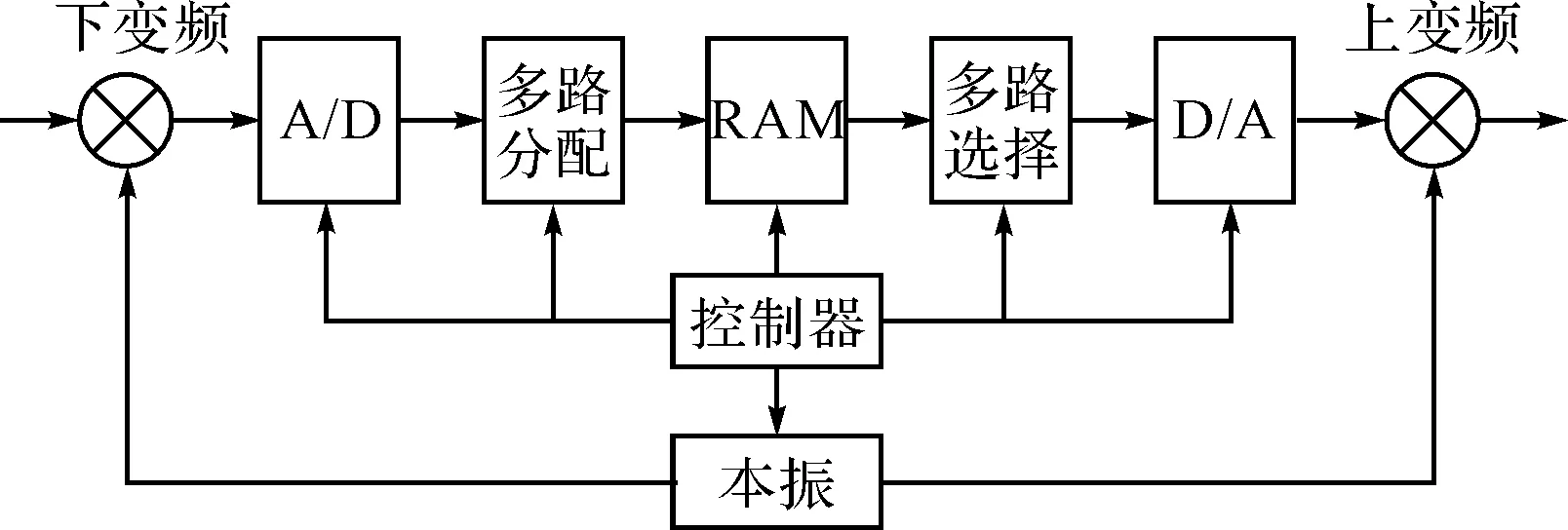
图5 DRFM原理图
4.3.4 DRFM在系统中的应用
系统中主控电路通过控制DRFM[8]中的RAM将接收的中频信号无失真地拷贝下来,产生的输出信号除加入时间延时外和输入信号保持一致。为了保持最终输出与输入信号间的高度相参性,在上下变频后用具有双端口输出的直接数字频率合成器(DDS)进行频率调制,使输出的射频信号最终能够获得和原输入射频信号具有良好相参性的多普勒频移参数fd的调制。DRFM输出信号和DDS的输出信号进行混频,产生包含距离延时和多普勒频移的正交双通道多普勒信号。输出信号再经带通滤波和功率放大进行上变频,从而达到模拟视频信息的带宽。DRFM可用于对复杂宽带相参雷达信号的存储转发,因此对于频率跳变、脉冲压缩等复杂的雷达回波信号也是非常有利的。此设计中的关键问题是镜像抑制和载波抑制,抑制比的大小取决于信号正交性的好坏,因此,在两路正交视频通道后面都增加有信号调理电路,最终实现的载波抑制比和镜像抑制比都在35dB以上。
4.3.5 功率信息实现
在仿真试验前,根据被试品的具体型号来确定雷达发射功率、天线增益。在仿真试验中,系统中采用动态程控衰减器控制信号幅度来模拟目标功率的变化。
4.3.6 干扰信息实现
实际中很多应用不要求复杂的杂波模型,所以此系统没有采用增加射频通道来产生干扰信息,而是采用主控计算机产生干扰序列,储存在DRFM中的RAM中,再经过DA变换完成。产生干扰信息的数据运算都在DSP上完成,使系统设计更加简化。
5 结语
为实现靶场导引头内外场联合试验闭合回路,本文针对其中的弹目相对运动特性加载技术进行了框架研究,采用X-Y轴扫描器和目标模拟器距离拖引外加多普勒频移的方式对弹目相对运动特性进行加载,来模拟导引头载飞过程中与目标的相对运动,同时介绍了一种目标模拟器的实现方法。该框架对靶场开展弹目相对运动特性加载工作具有一定的指导意义,但详细的设计方案还需进一步研究。
[1]单家元,孟秀云,丁艳,等.半实物仿真[M].北京:国防工业出版社,2009.
[2]张崇斌,白云.导引头目标模拟器设计与实现[J].火力与指挥控制,2012,10(37).
[3]陶益凡,唐慧强,黄勋.基于AD9854的信号发生器设计口[J].电子设计,2006,19(22):241-243.
[4]曹玉林,吴嗣亮,李家琪.一种通用PD导引头目标模拟器的设计[J].军民两用技术与产品,2006,23(4).
[5]王江展,白雪.DRFM在机载PD雷达宽带目标模拟器设计中的应用研究[J].信息化研究,2010,27(12):6-19.
[6]GJB1298-91,通用雷达、指挥仪维修性评审与试验方法[S].北京:中国标准出版社,1991.
[7]曹玉林,吴嗣亮,李家琪.一种通用PD导引头目标模拟器的设计[J].军民两用技术与产品,2006,23(4).
[8]王江民,白雪.DRFM在机载PD雷达宽带目标模拟器设计中的应用研究[J].信息化研究,2010,27(2):6-19.
OnPropertyLoadingTechnologyforRelativeMovementofMissileandTarget
HE Yang FENG Nan
(Unit 93, No.92941 Troops of PLA, Huludao 125000)
At present, how to carry out the seeker antijam test inside and outside range has become an important subject, among which the relative movement of missile target is a bottleneck that restricts the subject development. Aiming at this problem, property loading technology for relative movement of missile and target is studied. The relative movement of missile and target plan is proposed. X-Y axis scanner is used to achieve the relative movement in the elevation and azimuth angle. Moreover, distance pull-off and doppler frequency shift are used to realize relative movement in the distance. One target simulator is introduced at last. The discussion shows some guiding significance to the property loading technology for relative movement of missile and target in the range.
relative movement of missile and target, antijam, X-Y axis scanner, target simulator
2013年11月7日,
:2013年12月29日
何洋,男,硕士,助理工程师,研究方向:导弹发射控制。
TN973DOI:10.3969/j.issn1672-9730.2014.05.013
