基于虚拟样机技术的坦克步兵战车实战演习仿真*
2014-07-24朱苛娄苏计东李旭荣
朱苛娄, 苏计东, 李旭荣
(1.国家电网平高集团技术中心 智能控制研究所,河南 平顶山 467000; 2.华中农业大学 工学院,湖北 武汉 430070)
基于虚拟样机技术的坦克步兵战车实战演习仿真*
朱苛娄1, 苏计东1, 李旭荣2
(1.国家电网平高集团技术中心 智能控制研究所,河南 平顶山 467000; 2.华中农业大学 工学院,湖北 武汉 430070)
BMP-2是前苏联时期制造的步兵战车,该战车虽制造年代久远,但对以后世界步兵战车的发展起到引导作用。其主要特点是坦克配备一门机关炮和拱肩反坦克导弹。为了实现该步兵车实战演习过程,在ADAMS中建立该步兵车的虚拟样机模型,对模型的各部件添加约束和驱动,并进行运动仿真,以显示该型步兵战车的强大作战力。
步兵战车;建模 添加约束;驱动力及函数;动态仿真分析
Abstract: BMP-2 is a kind of infantry chariot manufactured in the former Soviet Union , which plays a guiding role for the later development of the infantry fighting vehicles though the chariot has an old age. Its main feature is that the tank is equipped with a cannon and spandrel antitank missile. In order to realize the simulation for the infantry vehicle actual process, the virtual prototype of the infantry vehicle in ADAMS need to be made, and add constraints and drive to the components of the model, and then the simulation exercise is done to show the powerful combat force of infantry chariot.
Key words: infantry chariot; modeling; add constraint; drive and function; dynamic simulation analysis
0 引 言
坦克是现代陆上作战的主要武器,它是一种具有强大的直射火力、高度越野机动性和很强的装甲防护力的履带式装甲战斗车辆,反坦克的武器与坦克的激烈对抗,促进了坦克和现代步兵战车的飞速发展。其中前苏联研制BMP系列步兵战车,是世界上装备数量最多、装备国家最多的步兵战车,引领当时世界反坦克步兵战车的发展趋势。这里选取具有代表性的BMP-2型步兵战车为例建立虚拟样机模型,观察及分析其实战演习过程。
BMP-2步兵战车主要武器为1门高平两用机关炮和“拱肩”反坦克导弹4枚。因此,在模型塑造方面,采用坦克式战车机构,并搭配一管防空导弹。步兵车可以分为车身,前后车轮,前后车轮轴,主炮,发射架底架,发射架上升架,导弹旋转架,导弹等[1]。为了分析该步兵车实战演习运动过程,笔者应用ADAMS软件对步兵车模型进行运动仿真分析,以达到对战车灵活性检验的目的。
1 战车虚拟样机模型的建立
笔者在Pro/E软件中进行了各部件的三维建模与装配,然后导入到ADAMS软件中,进行运动仿真[1]。该模型的主要部件就是塔克、坦克上面被拦截导弹、发射导弹和飞机。其中前三个部件是最重要的,所以它们的具体尺寸[2]见图1~3。坦克上面的拦截导弹的直径为10 mm,总长度为140 mm,尖端长度为30 mm,侧翼的厚度为2 mm,发射导弹直径为15 mm,总长度为150 mm,尖端长度为30 mm,侧翼的厚度为2 mm。最后总装配尺寸与效果见图4[3]。
图1 坦克模型 图2 坦克上面被拦截的导弹
图3 发射导弹 图4 总体布局
2 战车实战演习运动分析
步兵战车在演习时主要有以下六个运动:①战车匀速前进。②发现移动活靶并停止,旋转炮台主炮并发射炮弹击中活靶。③炮台主炮复位,同时发现直升机扔下炸弹。④车身旋转,导弹底座上升架上升,导弹旋转架旋转并发射导弹拦截炸弹成功。⑤旋转架复位,上升架下降到底座正常位置。⑥桥面合龙,坦克演习结束匀速前进。
3 添加约束和接触及驱动
SFORCE1: PART_lanjiedaodan1与PART_lanjiedaodan2 SFORCE2: PART_lanjiedaodan2与PART_lanjiedaodan3
SFORCE3: PART_lanjieddaodan3与PART_lamjiedaodan4 SFORCE4: PART_daodan1与
PART_daodan2
SFORCE5: PART_daodan2与PART_daodan3
(5) 添加驱动。由于本装置中驱动及函数的设置较多且复杂。具体各部件之间的驱动函数见表1。
表1 各种驱动函数

用同样的方法添加炮弹与靶子,拦截导弹与导弹之间的载荷,车轮与桥面之间的载荷。
4 创建传感器
单击“Simulate”--“Sensor”-- “New”,在弹出的对话框中,Expression后的表达式为:DX(MARKER_393,MARKER_423) Value:0.0,Error Tolerance:0.1,其他用默认值[4]。
再单击“OK”即可。
5 创建脚本文件与脚本仿真
“Simulate”--“Script”-- “New”,弹出对话框,END TIME:5.0,STEPS:50,
在Script Type 后的下拉列表中选择“Adams/Solver Commands”,再在Adams/Solver Commands:下的文本框中输入下代码,具体如图5,再单击“OK”。
运行仿真。单击仿真按钮,将仿真时间设置为9.5s,仿真步数设置为400,单击按钮开始仿真计算。单击“Simulate”—“Scripted Controls”弹出对话框,单击按钮“〗”,开始仿真。
导弹被拦截的三个状态。由仿真该坦克步兵战车实战演习,可见导弹被拦截的三个过程分别如图6~8所示。

图5 脚本对话框 图6 爆炸前
图7 爆炸中 图8 爆炸后
6 运动数据分析
(1) 拦截导弹X,Y方向的运动位移分别如图9和图10所示。结合函数STEP(time,0,0,2.5,6.549846694)+DIM(time,6.5 )*-1611.86*time前一时间,导弹和车一起运动,后一时间导弹发射,基本符合要求。
(2) 上车身位移的变化,速度的变化如图11、12。在3.5~7 s之间,拦截导弹和发射导弹相碰撞,车身没有前进,根据动量守恒定律,拦截导弹和车身动量守恒,车身速度在接近7 s时稍有变化。
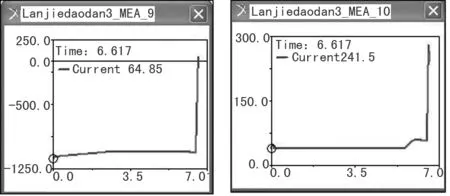
图9 导弹X方向位移 图10 导弹Y方向位移
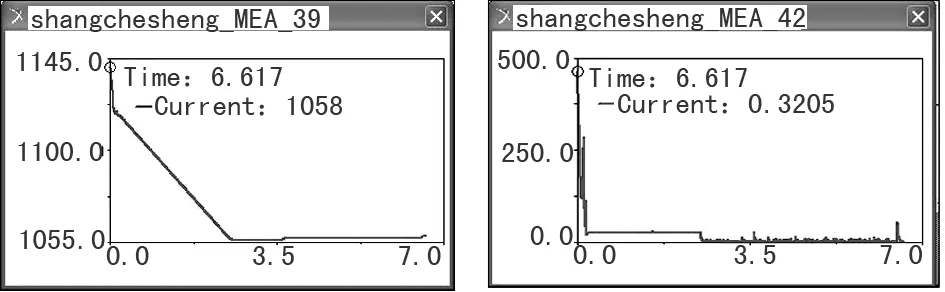
图11 上车身位移 图12 上车身速度
7 结 语
总结共有以下几个方面:车体,导弹和直升机模型的建立,在建立过程中要巧妙的利用布尔加减运算,同时要及时命名;约束的添加,模型中的约束很多,在建立约束添加动力时要连续,以免最后遗忘而使模型无法仿真;运动的分析与控制,战车的运动,行进中的停止,导弹的发射与碰撞,导弹的爆炸,直升机的停止与起飞,桥面的合龙控制,传感器函数的编辑,运动过程时间的分配。总体来说,通过利用ADAMS对步兵车进行建模,添加约束,最后到运动的仿真,突出显示了步兵车良好的战场适应力和灵活性[4]。
[1] 李增刚.ADAMS入门详解与实例[M]. 北京:国防工业出版社,2007.
[2] 程友联.机械原理[M]. 北京:中国农业出版社,2008.
[3] 濮良贵,纪名刚.机械设计[M]. 第八版.北京:高等教育出版社, 2006.
[4] 周俊华,李旭荣.基于虚拟样机的乒乓球发球机动态仿真[J].机械研究与应用,2013(6):83-83.
The Simulation of Tank Infantry Vehicle Actual Process Based on Virtual Prototype Technology
ZHU Ke-lou1, SU Ji-dong1, LI Xu-rong2
(1.NationalGridPinggaoGroupTechnologyCenter,IntelligentControlResearch,PingdingshanHenan467000,China; 2.HuazhongAgricultureUniverstiy,CollegeofEngineering,WuhanHubei430070,China)
2014-05-04
朱苛娄(1983-),河南禹州人,硕士,主要从事高压开关研发、CAE仿真计算等研究工作。
JJ81
A
1007-4414(2014)04-0071-03
