炮位侦察校射雷达多目标处理仿真研究*
2014-07-24
(陆军军官学院研究生三队 合肥 230031)
炮位侦察校射雷达多目标处理仿真研究*
刘力源
(陆军军官学院研究生三队 合肥 230031)
在相控阵炮位侦察校射雷达仿真系统中,雷达波束的仿真起着至关重要的作用。论文主要通过对相控阵炮位侦察校射雷达波束的最大跟踪目标数,进入和离开波束的时间等参数的描述,来对相控阵炮位侦察校射雷达波束的仿真进行研究分析。
仿真;相控阵;波束
ClassNumberTN959
1 引言
相控阵炮位侦察校射雷达是用于侦察正在发射的敌方火炮位置和测定己方炮弹弹着点坐标以校正射击的雷达,亦称炮位侦察雷达。近年来,计算机建模与仿真技术在军事训练方面的应用,不仅可以有效地节省大量的人力、物力,更重要的是节省了财力和时间,是加速炮位侦察校射雷达仿真技术发展的有效手段。而对于炮位侦察校射雷达仿真系统,雷达波束仿真的研究起着至关重要的作用。
搜索波束对空间目标的捕获情况既涉及时间维又涉及多普勒维,在搜索扫描过程中,弹丸也同时从下到上在运动(侦察方式)或从上到下运动(校射方式),因此,就存在搜索波束是否能与目标交汇的问题的判断。文章通过对进入和离开波束的时间等参数的描述可以很直观地判断目标轨迹是否与波束相交,并计算出雷达波束的最大跟踪目标数。
2 仿真数学模型
2.1 目标轨迹计算
假设炮弹阻力系数为0,把高斯坐标看作直角坐标,并用直角坐标系下的抛物线来描述炮弹的运动轨迹。若炮阵地坐标为(X0,Y0,Z0),炮弹发射初速度为V0,炮弹与地面的夹角为α,炮弹与正北夹角为θ(如图1所示),则可按以下步骤求得炮弹发射T秒后目标A的位置(XA,YA,ZA)。图1中,直线OB为炮弹轨迹在水平面OXY上的投影。
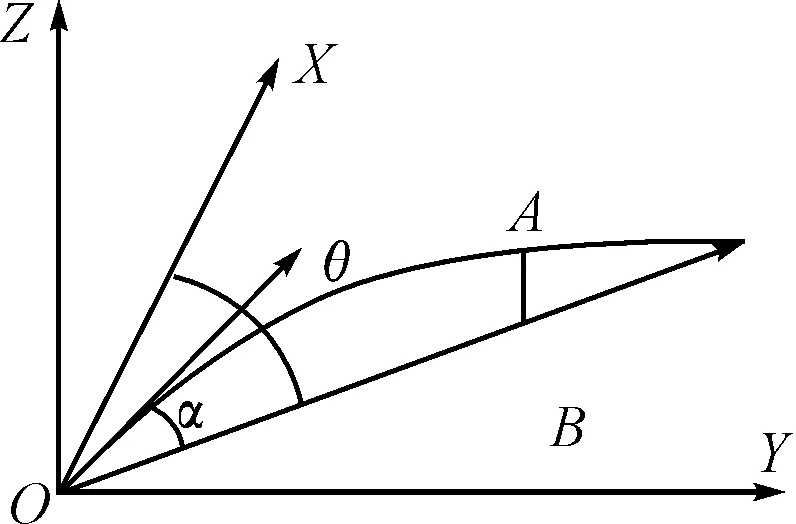
图1 炮弹空中轨迹示意图
R=OB=V0cosαT
(1)
则目标在T时刻的位置为
XA=X0+Rcosθ=X0+V0Tcosαcosθ
(2)
YA=Y0+Rsinθ=X0+V0Tcosαsinθ
(3)
ZA=Z0+V0Tsinα-(1/2)gT2
(4)
2.2目标穿过波束的状态
在侦察模式下,雷达跟踪敌方弹丸的升弧段。雷达工作时,主控计算机根据搜索扇区地形遮蔽角的变化控制波束的仰角位置,形成一个仰角波束宽度的搜索屏,控制搜索波束序列(根据搜索扇区大小和遮蔽角决定)以一定的频率在搜索扇形区搜索弹丸目标。一旦搜索到目标,雷达立即在搜索到目标的位置发射一验证波束对目标进行验证。目标穿过波束的示意图如图2所示。图中进入和离开波束的时间为T1、T2。
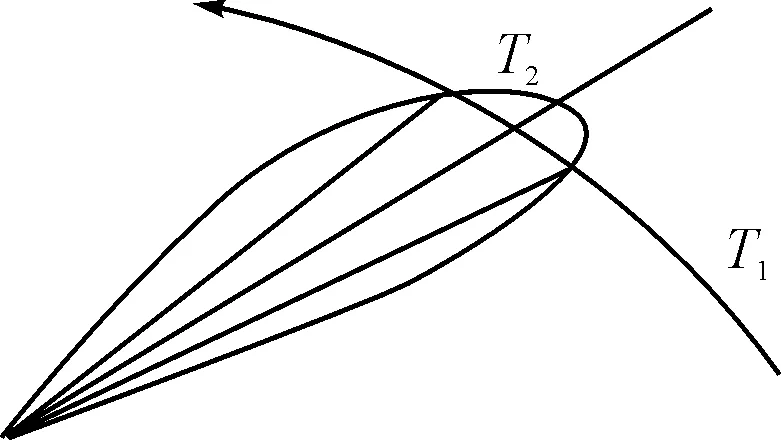
图2 目标穿过波束示意图
2.3目标进入和离开某一波束的时间T1、T2
波束为椭圆,长半轴为P,短半轴为Q。波束交叉排列,横向排列不等间隔,波束为M个,纵向排列等间隔,波束为N个。对某一目标穿过波束范围可以找到两点A1,A2。利用式(1)~式(4)计算可以得到两点相应的位置,转换成天线坐标系位置如下(T1,X1,Y1,R1)和(T2,X2,Y2,R2),如图3所示。
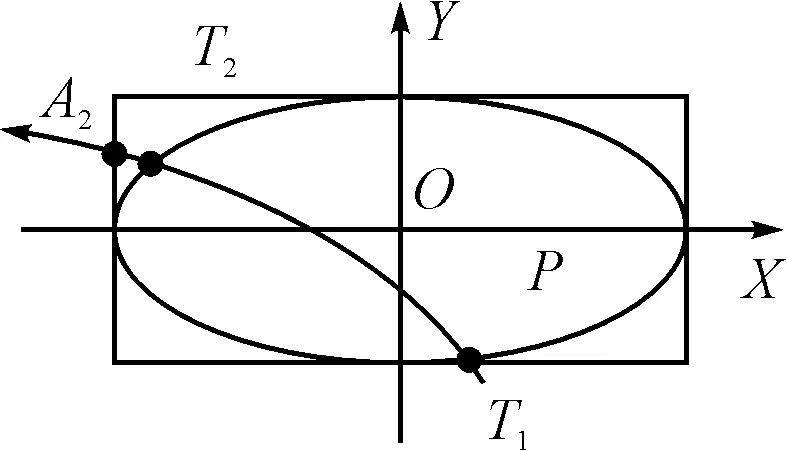
图3 目标穿过天线示意图
设波束的方位角为SX,俯仰角为SY,目标飞行轨迹A1,A2穿过波束面的一段为直线,则目标轨迹与波束面的交点(X,Y)要满足以下方程:
交点与A1,A2在同一直线上,满足直线方程:

(5)
(6)
交点还应满足椭圆方程:

(7)
根据以上已知情况,可设:
(8)

(9)
将方程(8),方程(9)代入方程(7),解方程(5),方程(6),方程(7)可得:
AT2+BT+C=0
(10)
其中:
A=KY2P2+KX2Q2
B=2KY(Y1-KYT1-SY)P2
+2KX(X1-KXT1-SX)Q2
(11)
C=(Y1-KYT1-SY)2P2
+(X1-KXT1-SX)Q2-P2Q2
(12)
解二次方程(10),若B2-4AC≤0,则目标轨迹与波束不想交。若B2-4AC>0,则目标轨迹和波束有两个交点。
2.4 跟踪目标数计算
假设Td为波束驻留时间,N为己跟踪目标数,T为跟踪要求的采样间隔(s),D搜索围(°),G搜索周期(s),则在采样间隔时驻留波束个数为ΔT/Td,采样间隔T还可以用来搜索波束数为(ΔT/Td-N),采样间隔ΔT内还真正可以用来搜索的波束为(T/Td-N)(1-0.2)。考虑到整个工作过程中除了搜索、跟踪目标外,还有一分波束用于验证,而且跟踪的采样间隔常常在开始时较小,故而可以用来搜索的波数乘上0.8这个系数。设90°搜索范围有49个波束,则在搜索范围D内有波束数:
H=49D/90=0.54D
(13)
搜索周期为
G=ΔTD0.54/0.8(ΔT/Td-N)
=0.432ΔTD(ΔT/Td-N)
(14)
当|T2-T1| (15) 得到: 其中,[X]表示对X取整数。 A=KY2P2+KX2Q2 (16) B=2KY(Y1-KYT1-SY)P2 +2KX(X1-KXT1-SX)Q2 (17) C=(Y1-KYT1-SY)2P2 +(X1-KXT1-SX)Q2-P2Q2 (18) 通过Matlab仿真软件(设置炮弹发射初始产生参数,阵地参数见表1),完成了对五个炮阵地,大量目标运动轨迹的模拟。 表1 仿真结果 本文通过对相控阵炮位侦察校射雷达仿真系统中波束的仿真研究,推算出目标进入和离开波束的时间,利用搜索周期等于目标穿过波束所用时间这一临界点,计算出波束的跟踪目标数。通过雷达系统仿真,最终可以推算出炮阵地的位置坐标。因此,波束的研究是炮位侦察校射雷达仿真系统软件的重要的部分。 [1]王义春.毫米波锥形相控阵波束控制系统设计[D].合肥:中国科学技术大学,2010. [2]尚军平.相控阵天线快速测量与校准技术研究[D].西安:西安电子科技大学,2010. [3]肖咏捷.美军陆军炮位侦察雷达发展研究[J].现代军事,2008(3):49-53. [4]田兆春,应甫成.炮位侦察雷达面临的挑战及发展趋向[J].火控雷达技术,1996(25):22-25. [5]郭金刚.704炮位侦察校射雷达[J].中国兵器,1994(1):20-21. [6]郭金刚.车载704-1型炮位侦察雷达校射雷达[J].坦克装甲车辆,2002(1):20-21. [7]田兆春,刁华宗,张鹏.非跟踪体制炮位侦察雷达目标自动识别技术的实现[J].科学与雷达技术,2007(4):287-290. [8]张光义,赵玉洁.相控阵雷达技术[M].第1版.北京:电子工业出版社,2006. [9]游凤平.相控阵炮位雷达多目标处理软件仿真[J].现代雷达,2001(3):60-63. [10]宋李彬.相控阵雷达数据处理研究及在仿真系统中的应用[D].东南大学硕士论文. [11]常军.地面多目标跟踪滤波技术[J].电讯技术,2006(1):23-26. [12]王雪松,肖顺平,冯德军,等.现代雷达电子战系统建模与仿真[M].北京:电子工业出版社,2010:3. Multi-targetProcessingSimulationofArtilleryLocatingRadar LIU Liyuan (The Third Team of Graduate Group, Military Academy, Hefei 230031) The simulation of the radar beam plays a vital role in phased array artillery locating radar simulation system.In this paper, the simulation of phased array artillery locating radar beam is used to carry on the research analysis in the most tracking beam number, enter and leave the beam time. simulation, phased array, beam 2014年1月7日, :2014年2月19日 国家重点实验室主任基金(编号:CEMEE2012Z0101B)资助。 刘力源,男,硕士研究生,研究方向:雷达系统仿真。 TN959DOI:10.3969/j.issn1672-9730.2014.07.0263 仿真情况
4 结语
