基于模糊控制的液压伺服控制系统研究
2014-07-20高明玉
高明玉
(1.太原理工大学 信息工程学院,山西 太原 030024;2.山西大同煤矿集团 宏泰矿山工程建设有限责任公司,山西 大同 037003)
0 引言
作为液压控制技术的一个重要研究分支,液压伺服控制系统是自动控制领域的重要研究对象之一,近些年来,取得了很多研究成果[1-3]。液压伺服控制系统的控制任务是使控制系统的被控制量不受干扰的影响,使系统的输出能够快速地跟踪系统的输入。随着生产力的高速发展,要求液压伺服控制系统的反应速度越来越快,超调量越来越小。
由于液压伺服控制系统具有参数时变性、外负载干扰和非线性,采用传统的PID控制,控制效果不是特别理想,而模糊控制的优点是不要求被控对象有精确的数学模型,并且对于非线性和不确定性的被控对象可以实现实时控制。本文分别运用PID控制和模糊控制对液压伺服控制系统进行控制,并通过MATLAB仿真分析说明了模糊控制具有较好的动态和稳态性能。
1 液压伺服控制系统模型设计
先建立液压伺服控制系统的模型,如图1 所示。它由控制器、放大器、伺服阀、液压缸和负载、位置传感器5大部分组成,其结构如图2 所示。
对于非线性的液压伺服系统进行线性化之后,其传递函数为:

2 PID控制器的设计
传统PID控制器包含一个比例环节、一个积分环节和一个微分环节,它的输入输出形式可表示为:

其中:e(t)为PID控制器的输入量;u(t)为PID控制器的输出量;Kp,Ki,Kd分别为PID控制器的比例系数、积分系数和微分系数。传统PID控制器是比较古老和经典的控制器,具有控制精度高、抗干扰能力强等优点,但是它仅对于线性控制系统适用,对于非线性控制系统不适用,如果不知道被控对象精确的数学模型,传统的PID控制也是不可用的。
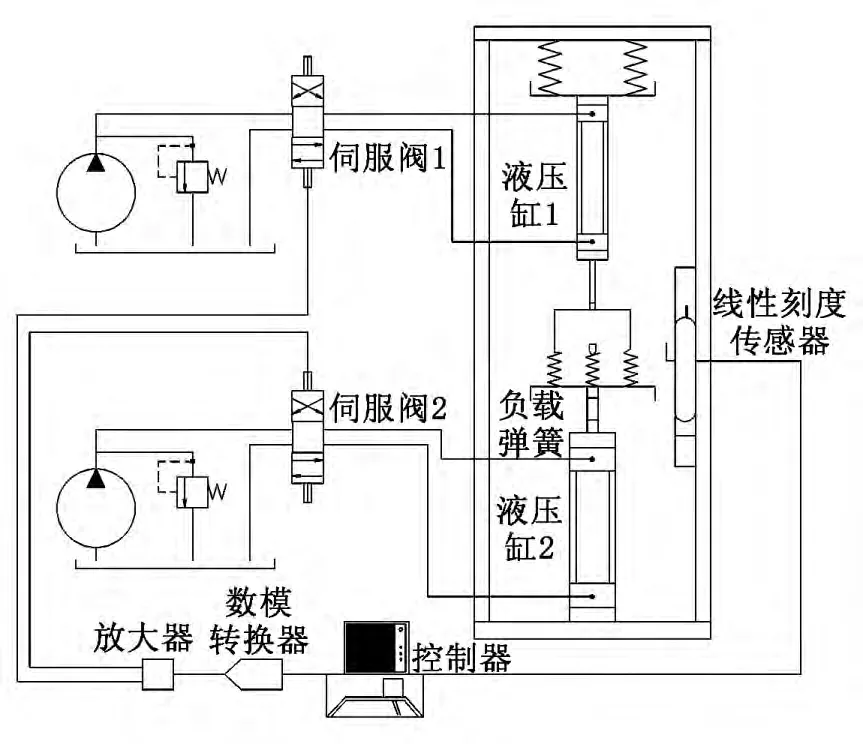
图1 液压伺服控制系统的模型
3 模糊控制器的设计
定义误差E、误差变化率EC和控制量U的模糊子集均为:
{NB,NM,NS,Z,PS,PM,PB}.
NB,NM,NS,Z,PS,PM,PB分别表示负大、负中、负小、零、正小、正中、正大。选取E和Ec以及U的论域均为{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6},且假设E和Ec以及U都服从三角形隶属函数曲线分布,如图3 所示。
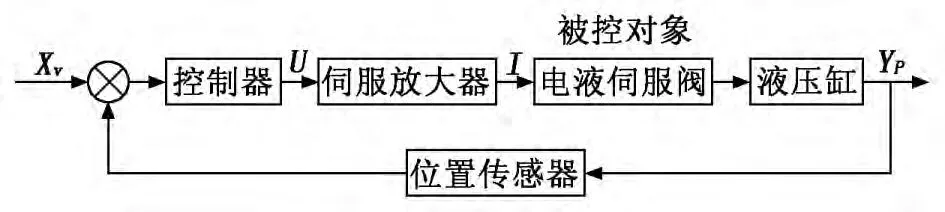
图2 液压伺服控制系统结构图

图3 E,Ec,Kp,Ki,Kd 的隶属函数曲线
为使U可以根据E和Ec的变化自我整定,首先需找出U和E以及Ec的对应关系,根据以往的专家经验,可得参数U的模糊控制规则表[4],如表1所示。

表1 U的模糊控制规则表
据模糊控制规则表1可以得到参数E和Ec以及U调整规则的条件语句如下:

其中:Mi,Ni,Ui是模糊集合,i=1,2,…,m。
最后运用Mamdani模糊推理算法和极大极小合成模糊规则来进行模糊推理运算。例如e=p,ec=q,通过表1可得到U的模糊推理结论是[5]:

其中:ωi=μMi(p)∧μNi(q),μMi(p)表示在集合Mi中对e=p求e的隶属度,μNi(q)表示在集合Ni中对ec=q求ec的隶属度;μU(Zp)表示在集合U中对u=Zp求u的隶属度;μUi(Zp)表示在集合Ui中对u=Zp求u的隶属度;μMi(p)∧μNi(q)表示μMi(p)与μNi(q)进行极小运算,然后μUi(Zp)与μMi(p)∧μNi(q)进行极小运算,最后i从1取到49,对上述值进行极大运算。
4 MATLAB仿真研究
对图1 所示的液压控制系统进行编辑,并按MATLAB仿真的正确步骤进行仿真。图4 给出PID控制和模糊控制的响应曲线。由图4 可以看出,模糊控制较PID控制具有良好的动态和稳态性能。
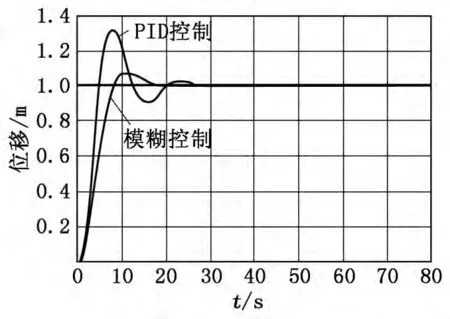
图4 PID控制和模糊控制的响应曲线
5 结论
针对具有复杂性和非线性的液压伺服控制系统,利用PID控制器和模糊控制器的优缺点,分别对液压系统进行了控制;通过MATLAB仿真的比较分析表明,该模糊控制器是一种简单而又实用的智能控制器,具有稳定性好、快速性好、适应性强等优点。
[1]刘勇,王新阁,孟庆迪.基于 MATLAB/Simulink的电液位置伺服系统可视化仿真[J].装备制造技术,2007(6):64-65.
[2]翟爱清,李琳.MATLAB在电液伺服模糊控制系统仿真中的应用[J].西安科技学院学报,2003,23(3):287-290.
[3]绍俊鹏,徐星辉,马坤.液压伺服系统 MRFAC理论及其MATLAB仿真研究[J].液压气动与密封,2002,3(63):4-5.
[4]闻新,周露,李东江.MATLAB模糊逻辑工具箱的分析与应用[M].北京:科学出版社,2001.
[5]汤兵勇,路林吉,王文杰.模糊控制理论与应用技术[M].北京:清华大学出版社,2002.
