一种新型多功能轮椅的研究与仿真
2014-07-18戴加全袁祖强刘永青
戴加全,袁祖强, 刘永青
(南京工业大学 机械与动力工程学院,江苏 南京 210009)
一种新型多功能轮椅的研究与仿真
戴加全,袁祖强, 刘永青
(南京工业大学 机械与动力工程学院,江苏 南京 210009)
针对目前市面上轮椅功能较为单一的情况,介绍了一种新型多功能轮椅,主要有三种模式,即普通模式、锻练模式和电动模式,不同的模式下对应不同的应用。给出了系统的总体控制示意图,利用Pro/E软件建立了实体模型,利用ADAMS软件做了仿真分析,并与理论计算结果做了对比。结果表明,各个模式下运行良好,对使用者的上肢锻炼具有一定效果,同时轮椅的运行平稳性也有所提高。
多功能轮椅;单片机;设计;仿真
0 引言
随着社会老龄化进程的加快以及由于各种疾病、工伤、交通事故等原因造成下肢损伤的人数的增加,为老年人和残疾人提供性能优越的代步和康复工具已成为整个社会重点关注的问题之一。轮椅是辅助康复和行走不便人群的重要工具,它不仅是肢体伤残者的代步工具,更重要的是使他们借助于轮椅进行身体锻炼和参与社会活动。然而目前世面上的轮椅大多功能较为单一,不能满足使用这多方面的需求。例如有的患者提出:这些电动轮椅除了作为代步工具外,最好增加一些功能,如辅助身体健康锻练,增加轮椅的乐趣等。
为了更好地满足使用者的需求,研究了一种新型多功能轮椅,集普通模式,锻练模式继和电动模式于一体,使用者可以根据自身需要在不同的运动模式之间切换,其中锻练模式下能够帮助使用者进行上肢辅助康复锻练,同时使患者心理上暗示自己并未完全失去运动能力,对增加患者恢复的信心起到一定的促进作用。综合利用Pro/E软件和ADAMS虚拟样机软件对轮椅结构设计和动态仿真分析,并且与理论计算做了对比。
1 多功能轮椅的结构设计
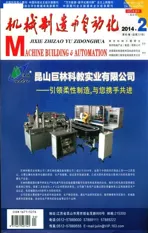
根据轮椅静态参数选取原则,在符合国家标准的基础上参照我国人体测量数据,该轮椅各部分几何尺寸的设计参数如表1所示。
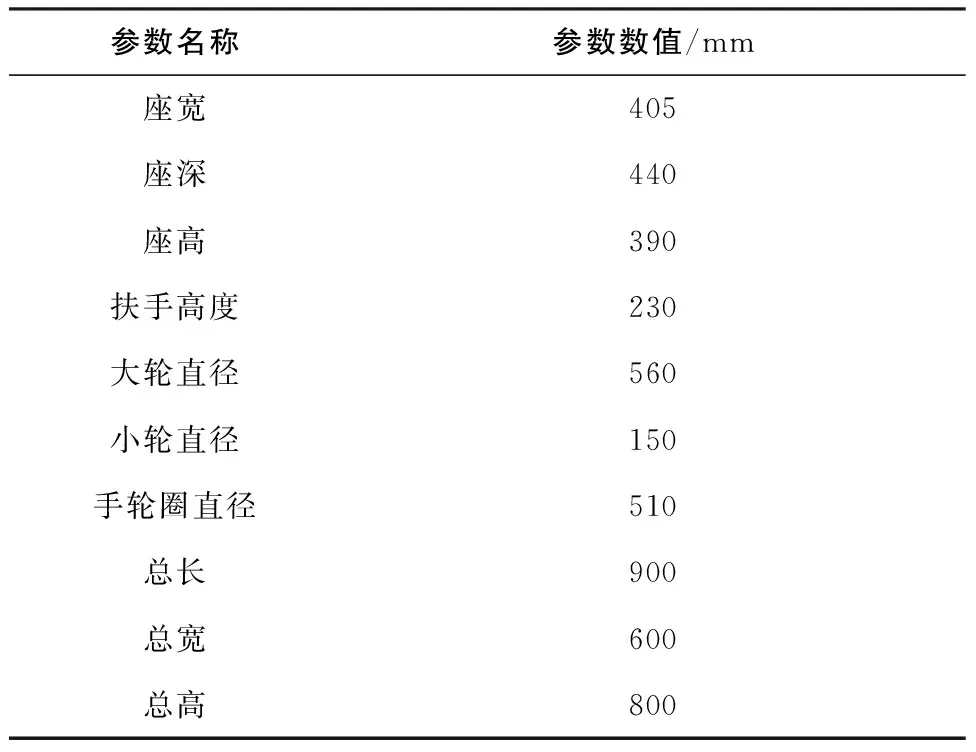
表1 轮椅尺寸设计参数
利用Pro/Engineer中的[拉伸]、[旋转]、[扫描]、[镜像]等操作,根据上一节轮椅的设计参数,完成轮椅支架、座椅、扶手、两个后轮、两个前轮以及两个前叉的建模,经装配后得到整个轮椅的实体模型,如图1(a) 所示,图1(b)为其实物图。


图1 轮椅的Pro/E模型和实物图
2 系统的总体结构与工作原理
该控制系统采用二级控制结构[1-2],系统的总体控制结构示意图和实物图分别如图2、图3所示。
图2 系统的总体控制结构示意图
图3 控制系统实物图
上级采用STC89C52型单片机为主控制器,主要用来收集外部输入设备的输入数字信号量和输入模拟量,按照一定的控制策略和应用协议将控制信息加工成指令通过RS-232串口发送给下级计算机。1602LCD用来显示当前轮椅的运动的模式和电动机的运动状态,其中运动状态主要有三种,即普通模式、锻练模式和电动模式,各个模式对应不同的应用。摇杆产生的模拟信号量控制电动机的速度大小和方向。
下级计算机采用Philips公司LPC2136芯片,驱动模块采用电动机专用控制芯T MS320LF2407A和直流永磁电动机,实现两电动机的协调运动,LPC2136根据接收到的指令的控制信息,控制直流永磁电动机的转速、方向和电磁开关的开闭。监测模块实时监测电动机的运行状态和故障类型,LPC2136通过RS-232再将电动机状态和故障类型传至单片机通过LCD显示。
3 锻练模块的设计
使用轮椅的人大多是下肢患有残疾而上肢健全,无论是什么原因引起的肢体残疾而造成的行动不便都会对使用者的心理造成巨大的负担,甚至从此一蹶不振。根据相关研究表明,让轮椅使用者自食其力是降低心理压力的最有效方法。通过自主移动轮椅并且在移动轮椅的过程中能够增加上肢力量的锻练,可以有效的帮助他们从心里上暗示自己并未完全丧失运动能力,可以像正常人一样生活、锻练,能够激起他们内心的能量,以增加他们实现梦想、施展才华的勇气和信心,可以有效的激发患者的创造力和潜能[3]。
基于上述观点,给轮椅增加了锻练模式,该模式下,通过在轮椅后轮轴处配合一阻尼器,通过阻尼器的作用增加使用者推动轮椅的力量,从而达到上述目的。阻尼器与后轮轴的配合是通过齿轮啮合实现的,阻尼器固定在轮椅后轮轴上方支架处,在后轮轴上安装有一可移动齿轮,只要按下操作面板上的控制模式按键就可以移动该齿轮的位置实现与阻尼器的离合,其示意图如图4所示。
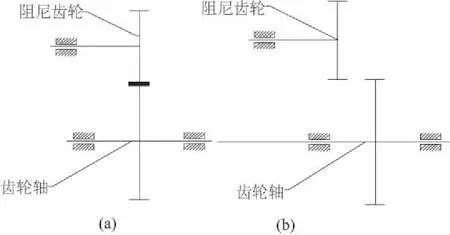
图4 阻尼器的离合示意图
4 计算与仿真
4.1 轮椅推力的计算
轮椅受到自重和人体质量以及地面对其支撑反力,其中自重p1=20kg,人身质量p2=75kg,以轮椅为研究对象,Fa,Fb,Fc,Fd分别是来自地面对车轮的支撑反力,6个力相互平行,组成空间力系,如图5。取坐标系xyz,列出平衡方程如下:
代入数据得:
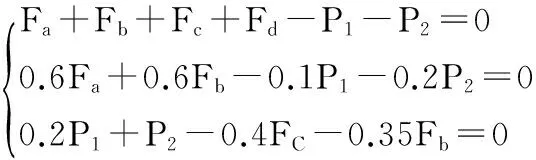
其中:Fa=Fb,Fc=Fd,解得:
Fa=Fb=141.7N,Fc=Fd=333.3N
按照摩擦系数μ=0.3计算,则轮子与地面的摩擦力:
f=μFc=0.3×333.3=99.9N
即轮椅使用者至少需要99.9N的力才可以将轮椅推动。
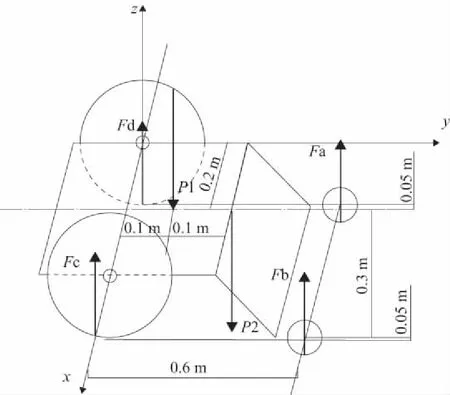
图5 轮椅的空间力系示意图
4.2 仿真模型的建立
4.2.1 虚拟样机模型
在ADAMS/View中输入和输出其他应用程序的CAD文件图形,需要ADAMS/Exchange模块的支持。ADAMS/Exchange模块支持IGES,STEP,DXF/DWG和Parasolid等几种格式图形文件的输入和输出[4]。通过Parasolid的数据格式将Pro/E建好的轮椅三维实体模型及装配体导入到Adams/View环境下,分别编辑各组件的属性和构成组建元素的属性,包括名称、颜色、材料属性等信息[5]。轮椅虚拟样机主要由以下几个部分组成:车身、两个后轮、两个前轮及两个前叉。
4.2.2 仿真计算工况的确定
1) 定义约束和驱动
ADAMS/ View提供了12种常用的运动副工具。通过这些运动副,使模型中各个独立的部件联系起来形成有机的整体。文中轮椅的仿真模型主要用到的运动副有旋转副、固定副。将运动地面与大地之间定义为固定副,将车架后轴与两个后轮之间定义为旋转副,将前叉与前轮之间定义为旋转副,最后在后轮轴与后轮的旋转副上添加驱动力矩[6]。
2) 自由度的计算
机械系统的自由度表示系统中各构件相对于地面机架所具有的独立运动数量。自由度与系统的构件数量、运动副的类型和数量、原动机的类型和数量、其他约束条件有关[7]。ADAMS中自由度(DOF)的计算公式为:
其中,n表示系统的总活动构件数,pi,m表示第i个运动副的约束条件数(运动副总数) ,qj,X表示第j个原动机的驱动约束条件数,其他约束条件数用Rk表示。本例中共有6个活动构件,4个转动副,一个固定副。故自由度
DOF=6×6-5×4-6=10
3) 施加配重和定义接触
将模型导入ADAMS后需要给所有零件定义材料属性,系统会根据所选择的材料自动计算部件的质量和转动惯量。另外,轮椅使用者自身质量的施加也是仿真模拟现实环境的必要条件,故将75kg的质量简化为一球施加在座椅上。部件的重力在建模初始完成设置,在全局坐标系中设定重力加速度G=9.80665,方向沿y轴负向为件间的接触力。
4.2.3 仿真运行与分析
完成样机建模和输出设置,在即将开始仿真之前,需要对模型进行最后的验证,排除建模过程中隐含的错误,以保证仿真分析顺利进行。利用模型自检工具,检查不恰当的连接和约束、没有约束的构建、无质量构建、样机的自由度等。另外在进行动力学分析之前,先进行静态分析,以排除系统在启动状态下的一些瞬态响应[8]。
在主工具箱选择仿真工具图标,在参数设置区设置仿真参数,设置仿真时间(End Time)为5s,仿真步数(Steps)为50,开始仿真。仿真结束后,通过ADAMS/Postprocessor模块输出分析结果曲线,如图6所示。
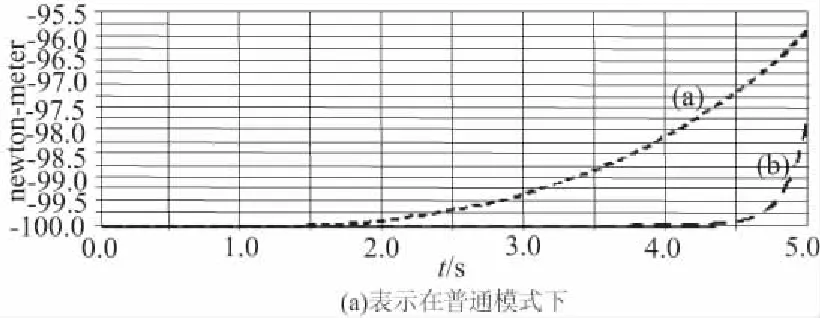
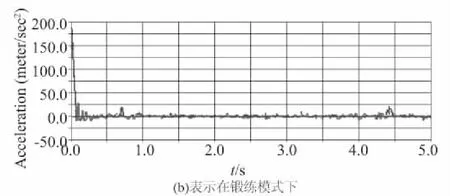
图6 后轮驱动力曲线和加速度曲线
从图中可以看出仿真结果与计算结果基本吻合,即在平路需要100N左右的力才能将轮椅移动,而在锻练模式下,由于增加了阻尼力,对使用者的上肢驱动力量要求有所增加,从而达到了辅助锻炼上肢的目的,同时轮椅的运行平稳性也有所提高,增加了轮椅的舒适性。
5 结论
经过实验和仿真,多功能轮椅能很好地完成各种应用模式下的动作:1) 在普通模式下就相当于一款手动轮椅,适合在室内等运动范围较小的环境下或他人帮助情况
下使用;2) 锻练模式用于辅助上肢力量的锻练,以强身健体、增加患者的康复信心;3) 电动模式下,以蓄电池作为动力源,配合有液晶显示、报警、鸣笛、故障检测等预定功能,能够轻松完成前进、后退、左转、右转、制动等动作,适合作为代步工具。其中,在锻练模式下做了理论计算与仿真计算的对比,结果基本相吻合,符合预期设计要求,对使用者上肢力量锻练有所帮助,轮椅运行的平稳性也有所提高,同时对增加患者的康复信心也有积极的作用。
[1] 王仁杰,曾庆军. 基于DSP+单片机的主从式电动轮椅控制器设计[J].机械技术与工程,2009,9(9):20-23.
[2] Sun lin ing,Yao Yu feng.Research on the Open Manipulator controller for assisting the Elderly and the Disabled[C].International Technology and Innovation Conference,Shanghai,2006.
[3] 陈志刚. 基于残疾人心理需求的手动轮椅设计与研究[D].西安:西安交通大学,2009:19-23.
[4] 李增刚.ADAMS入门详解与实例[M].北京:国防工业出版社,2007:47-51.
[5] T.Y.Lin.Research and development of an auxiliary driving unit with retract mechanism for wheelchairs[Z],Tainan, Southern Taiwan University,2006. .
[6] 刘军.竞速轮椅的结构设计及虚拟仿真[J].兰州交通大学学报,2011,6(2):55-58.
[7] 郑凯,胡仁喜,陈鹿民.ADAMS 2005 机械设计高级应用实例[M].北京:机械工业出版社,2006:55-56.
[8] 郭卫东.虚拟样机技术与ADAMS应用实例教程[M].北京:北京航空航天大学出版社,2008:33-34.
Research and Simulation of New Type of Multifunctional Wheelchair
DAI Jia-quan, YUAN Zu-qiang, LIU Yong-qing
(School of Mechanical and Power Engineering, Nanjing University of Technology, Nanjing 210009, China)
A new type of multifunctional wheelchair is introduced in view of its single function on the present market. There are three main models, such as common mode, exercise mode and electric mode. Different mode is used for different application. The overall control plan of the system is designed. The solid model is established by Pro/E its simulation analysis is done by ADAMS and the result is compared with the theoretical one. It indicates that the damper has obvious effect on user’s arm and its stability is also improved.
multifunctional wheelchair; single-chip; design; simulation
戴加全(1987-),男,硕士研究生,主要研究方向为助老助残机器人的研究。
TH12,TP391.9
B
1671-5276(2014)02-0099-03
2013-01-31