基于数字水听器的分布式水下声场测量系统*
2014-07-18邢传玺朴胜春
邢传玺, 朴胜春, 宋 扬
(1.哈尔滨工程大学 水声技术重点实验室 黑龙江 哈尔滨 150001;2.哈尔滨工程大学 水声工程学院,黑龙江 哈尔滨 150001)
基于数字水听器的分布式水下声场测量系统*
邢传玺1,2, 朴胜春1,2, 宋 扬1,2
(1.哈尔滨工程大学 水声技术重点实验室 黑龙江 哈尔滨 150001;2.哈尔滨工程大学 水声工程学院,黑龙江 哈尔滨 150001)
设计了一种自容式数字水听器分布式水声测量系统。海洋声学测量系统由多个数字水听器连接构成,各个数字水听器通过电缆逐个相连,可以调整阵元的间隔和阵元个数。数字水听器可对采集获得的数据进行自容式存储或实时上传,优化设计了可高速串行数据传输的RS—485总线,采用8B/10B链路编码,利用串行信号的上升/下降的时钟边沿作为高速时钟采样的起始标志,实现了数据帧的提取,可实现串行编码数据沿双绞线以15 MB/s远距离传输,并在总线上参考IEEE 1588授时协议给出了一种基元同步方案,同步最大误差为0.5 μs。最终通过海上试验证明:采集效果良好,系统工作可靠、整体功耗低,各个阵元同步准确,可以广泛应用于水下阵元测量领域。
垂直阵; 数字水听器; 海洋声学测量
0 引 言
海洋环境非常复杂多变,存在多途效应、频散效应、水中的不均匀性以及边界的不平整等干扰因素,会使声信号在海洋信道中的传播存在严重的畸变和起伏。这些不确定的环境因素限制了接收到的信号的时间和空间的稳定性及连贯性,尤其在远距离低频声传播试验中,这种干扰表现极其明显。采用多元水听器基阵不但可获得空间增益,还可以得到更精确的声级和谱级的测量值[1~4]。因此,目前多元水听器基阵是进行水下声场测量的主要技术装备之一。在国外,众多研究机构纷纷致力于该领域研究。Alessandra Tesei等人研制了一种最新型的数字阵列水听器,可以灵活地通过增加水听器的方式增加阵元数目,并可将水听器信号采集结果通过有线电缆传输至控制单元,并经控制单元发送至PC进行存储[2]。这种数字水听器的缺点就是数据储存必须要有PC参与,且需多路转接后才能进行数据存储。而我国在多元水听器集阵通常采用多个声压水听器捆绑组成集阵,模拟信号通过电缆传输至船上再进行接收,这种方法虽然易与实现,但是缺点也很明显:阵元之间的距离调整复杂困难;模拟信号通过电缆传输损耗影响测量精度,且基元之间的同步性不可控。
本文设计了一种低功耗、高分辨率的水听器数字垂直阵海洋声学测量系统,测试与试验结果表明:该系统可进行速率达15 MB/s的远距离传输,且对10 Hz~10 kHz宽带信号的采集效果良好,性能稳定可靠。
1 系统组成
系统由控制单元、多个自容式数字水听器和连接各个节点的外部电缆构成:控制单元的主要功能为触发各个数字水听器进行同步采集、基元授时;自容式数字水听器对信号进行采集处理;电缆包括了一组优化的RS—485总线和外部电源线。
2 系统设计与实现
2.1 自容式数字水听器的设计与实现
数字水听器主要由压电陶瓷声压水听器、信号调理电路、采集存储电路构成,其外部形状为一圆柱型罐体,底面直径为80 cm,高为100 cm,信号调理电路和信号处理电路及锂电池放置在罐体中,压电陶瓷水听器布置在罐体的底部,输出电线连入罐体。数罐体内部放置了信号调理电路和采集记录电路,其电路组成结构图如图1。
信号调理电路功能是对水听器输出信号进行放大滤波,其采用高阻抗输入电路,并根据声压水听器的电容特性选择输入电容进行阻抗匹配,这样设计可以提高传感器的灵敏度,可得到稳定的可靠的弱电平信号。同时为提高整体动态范围,水听器输出信号分成两路不同的放大增益信号输出通道,两通道增益相差40 dB,对于较小信号可观测高增益通道采集结果,对于高增益通道限幅信号可观测低增益通道采集结果[2]。
采集记录电路主控芯片采用基于ARM CortexTM—M3内核的微处理器STM32F103RET6,A/D转换器采用24位Δ-ΣA/D转换芯片ADS1274,ADS1274有4路同步采集通道,本系统中只采用两路分别连接低增益通道和高增益通道,另两路作为扩展备用[5,6]。
无论系统是否开启实时上传功能,采集到的数据均会存储在SD卡中。在固件程序中开发中,移植了FAT32文件系统和Mass storage协议,系统的USB接口与PC连接后,系统便被识别为可移动存储设备,操作人员可直接使用PC的文件管理系统访问SD卡内数据。根据SD卡存储速度,该数字水听器最高采样率可达100 kHz。如果开启数据实时上传功能,系统采样率将受限于RS—485总线带宽,最高采样率为5 kHz。
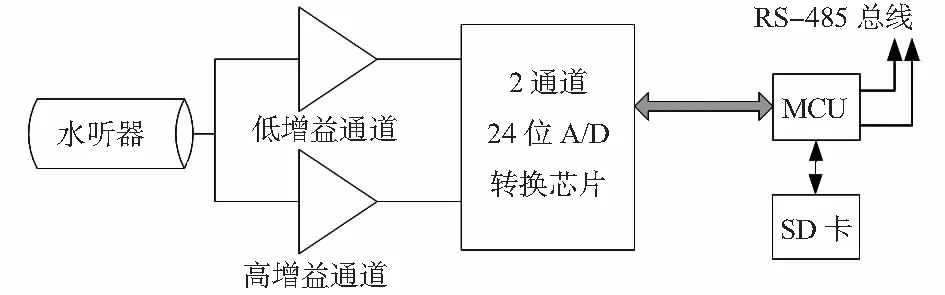
图1 数字水听器电路结构Fig 1 Circuit structure of digital hydrophones
在设计中,电路的器件全部采用了低功耗器件设计,单个数字水听器开始采集时功耗大约200 mW。
2.2 控制单元设计与实现
控制单元在本系统中主要功能有:作为主时钟为所有分布式从时钟同步;控制总线上的数字水听器开始或停止数据采集,保证采集的同步性;在数据进行实时上传时接收数据采集部分的数据,并根据需求将数据通过无线模块上传,控制单元部分还可连接GPS模块,以获得更精准的时间信息用于同步授时。
控制单元通过RS—485总线向数字水听器发送触发信号使其开始或停止采集,如果数字水听器处于数据上传模式,则在采集开始后,控制单元以应答方式依次命令各个数字水听器上传数据。控制单元将接收到的数据通过无线网桥传输到远端PC。为了保证接收数据的码流一致,控制单元选用与数字水听器主控芯片相同序列的ARM CortexTM—M3内核芯片。
2.3 分布式采集节点通信总线设计
为了能实现同步准确和高速数据上传,本系统对通信总线所采用的RS—485接口做了特殊设计:RS—485由主控芯片的PWM接口扩展而成,并不是常规的UART接口,主控芯片的PWM接口最高速率可达到32 MHz,并且还可应用DMA通道。对PWM通道编程使其产生的所需的数字方波编码可实现指令和数据传输。在接收数据时,利用PWM方波的输入捕获功能,通过识别捕获得到的数据上升沿来识别所接收的数据内容。
影响RS—485传输速率的主要因素是传输线的特性阻抗、电缆长度及传输方式[7,8]。传输线上的阻抗不连续和不匹配会导致总线内的数据信号反射,因此,必须在双绞线两端跨接匹配电阻使其匹配,并且在电路的设计中需要降低传输损耗和防止终端阻抗失配。在高速传输时,电缆的寄生电阻和电容时间常数作用在不同的传输码型时会对信号造成延迟时间和延迟抖动,此外,当串行数据中连续的出现数据“0”的低电平和“1”的高电平时,会使信号的直流电平出现漂移,从而使接收器因缺少跳变信号而跑偏。为了消除这一干扰,在数据发送前先进行信道编码以调整直流电平,在数据发送采用了8B/10B编码,接收时采用10B/8B解码,并分别在发送/接收端应用了预加重或均衡,以达到补偿高频分量的衰减,以便进一步提高接收信号强度。经测试,本高速RS—485总线在220 m长的双绞线上数据率可达15 MB/s。
2.4 分布式采集节点同步方式
本系统中将控制单元作为主时钟,连接在各个总线上的数字水听器为从时钟,由主时钟对从时钟进行同步。整个同步过程包括延迟测量和偏移测量校准两部分。其中延迟测量是为了测试信号在传输线上的延迟,而偏移测量校准是为了使从时钟与主时钟的时间信息同步[9,10]。当控制单元放置在水面时,可随时通过GPS进行时钟校准,以此实现每个分布式节点的校准。
延迟测量的流程如图2(a)所示,首先由挂在总线上最末端的数字水听器发出测时延信号,并记录信号发出时间TF0,其余各个数字水听器将其收到测时延信号的时间记录为TF0。控制单元在收到测时延信号后向总线上发送回馈信号,每个数字水听器将收到回馈信号的时间记录为TC0,则传输延迟Delay=(TC0-TF0)/2。本系统通过多次延迟测量,通过对所得结果进行均值计算以使准确度提高。
为了保证测得时延准确,测时延信号与回馈信号采用同样位宽、速率的传输方式。从时钟在延迟测量中用于计时的时间单位决定了时延准确程度,每个数字水听器在采集没有开始之前CPU几乎没有工作任务,因此,将CPU所有资源用来分频产生一个9 MHz频率的时钟来进行校时,9 MHz时钟大约0.1 μs,因此,在本系统的延迟测量里每个时间单位为0.1 μs。测量过程中最大误差不超过5个时间单位,即0.5 μs,满足本系统的同步需求。
因为各个节点之间的晶振均不相同,在使用中会存在时钟偏移现象,因此,必须进行偏移测量校准。偏移测量校准是将从时钟的时间信息与主时钟的时间信息进行同步。本系统中偏移测量流程如图2(b)所示,偏移测量校准过程是由主时钟发起的,主时钟首先向总线上发出校准的同步信号并记录信号发送完毕的时间TIM1,各从时钟节点分别记录各自接收到信号的本机时间TS1,随后主时钟向总线发送TIM1时间信息,各从时钟节点获取到时间信息后计算其与主时钟的偏移值
Offset=TS1-TIM1-Delay,
式中Delay为传输延迟值。得到偏移值后从时钟节点可以进行时间校正,若本机时间为TS2,则时间校正为:TS3=TS2-Offset。

图2 节点同步方式Fig 2 Synchronization mode of nodes
因为本系统的同步总线拥有较高的速率,同步过程完成较快,可通过提高同步频率以获得更高的同步精度。
3 系统测试与海上试验
对本系统分别进行了节点同步性能测试和海上试验。AD芯片开始执行A/D转换后,会输出一个下降沿信号,通过观测此管脚电平可获知AD开始工作时刻。控制单元通过RS—485总线向数字水听器发送开始采集命令后,通过示波器查看总线距离最长的2个数字水听器AD开始信号,误差小于0.5 μs。
为进一步验证各个基元分布式同步性能,分别选取总线上距离控制单元最近、最远、和中间处相邻2个的数字水听器进行相位一致性试验。利用信号发生器从10 Hz开始采用按1/3倍频程递增至1 kHz的方式为各个数字水听器发送信号进行逐点测试,得出距离控制单元最近的数字水听器与其他3个数字水听器之间的相位差。如图3所示,相位差都在0.6°以内,基本符合设计要求。不过通过相位差测量可看出,实际相位误差超过同步误差值,这些误差是模拟信号在通过各自的信号调理电路时所产生的。

图3 相位一致性测量结果Fig 3 Result of phase consistency measurement
本系统在2012年7月在中国黄海某海域进行了海上试验。试验中本系统采用垂直吊放方式,作为信号接收端,分别采用单频6 kHz的CW信号、1~9 kHz的线性调频信号和爆炸声信号作为声源进行试验。接收点距离声源5 km处,2#和10#数字水听器接收到的CW信号其时域信号如图4所示。
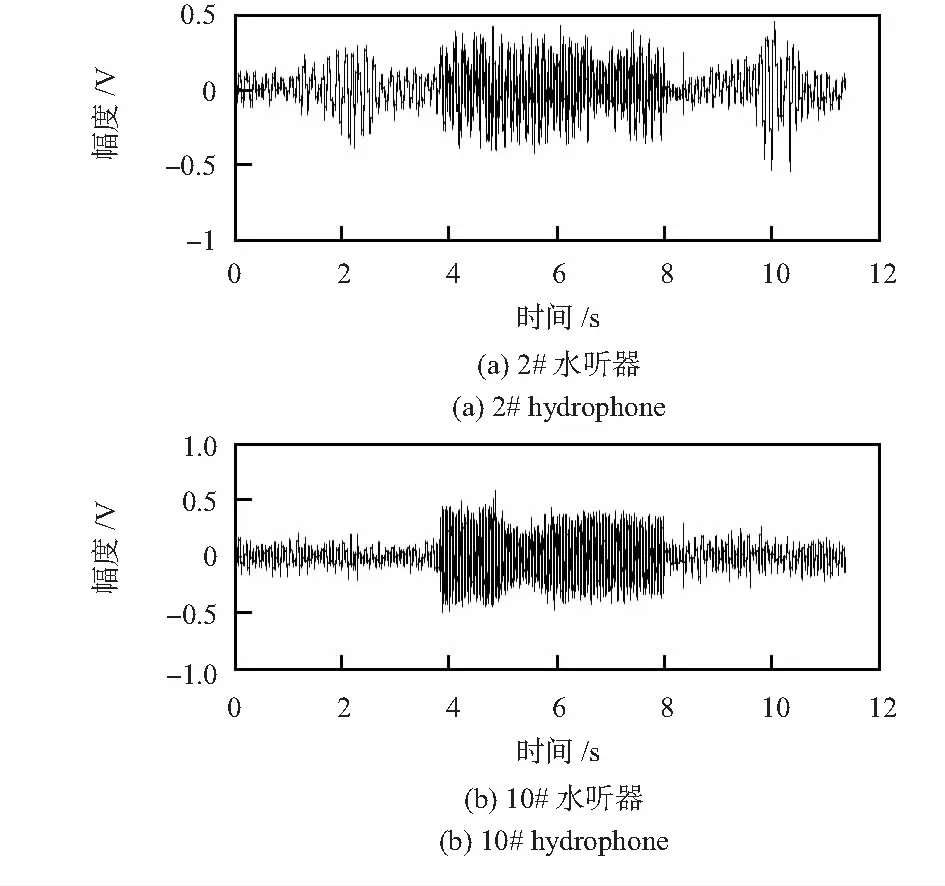
图4 海上试验信号波形Fig 4 Signal waveforms of offshore test
采集结束后16个数字水听器的数据大小和采集时间基本完全一致,海试中各个数字水听器接收到触发信号延迟最大为0.4 μs,可以认为,该海洋声学测量系统的多个数字水听器同步性能良好,可以满足同步采集需要。
4 结 论
本文设计并实现了自容式数字水听器分布式水声测量系统,可根据具体需求选择对采集获得的数据进行自容式存储或实时上传。系统设计了速率可达15 MB/s的高速RS—485接口,通过该数据总线结合IEEE 1588授时协议完成了多个数字水听器之间的同步,各基元之间最大误差为0.5 μs。最终通过海上试验证明:分布式采集系统之间同步准确,且对10 Hz~10 kHz带宽的信号的采集效果良好,系统工作可靠、整体功耗低,可以广泛应用于水下阵元测量领域。
[1] Walkinshaw Helen M.Measurements of ambient noise spectra in the South Norwegian Sea[J].IEEE Journal of Oceanic Enginee-ring,2005,30(2):262-266.
[2] Alessandra Tesei.An advanced digital hydrophone array for ship noise measurements[C]∥ECUA 2010 Istanbul Conference,2010:3-12.
[3] Wagstaff R A,Aitken-head J W.Ambient noise measurements in the northwest Indian Ocean[J].IEEE Journal of Oceanic Engineering,2005,30(2):295-302.
[4] 朱小华,郑 红,廖光洪,等. 沿海声层析仪的设计与实现[J].哈尔滨工程大学学报,2010,31(1):64-68.
[5] 赛尔吉欧·佛朗哥,刘树棠.基于运算放大器和模拟集成电路的电路设计[M].西安:西安交通大学出版社,2009:277-289.
[6] 邢传玺,朴胜春,刘振江,等.一种新型低频声矢量场采集系统的设计与实现[J].仪器仪表学报,2013,34(12):2800-2807.
[7] 李 成,王 鹏,丁天怀,等.RS—485总线的高速串行远距离数据传输[J].清华大学学报,2009,49(5):684-687.
[8] 丁天怀,李 成,王 鹏,等.地震勘探仪器的RS—485高速数据/能量传输[J].清华大学学报,2009,49(5):688-691.
[9] 潘宏伟.应用IEEE 1588协议的电力系统对时技术[D].济南:山东大学,2011:15-22.
[10] 陶 丽.IEEE 1588时钟同步协议的硬件设计与验证[D].哈尔滨:哈尔滨工业大学,2010:12-28.
Distributed underwater acoustic field measurement system based on digital hydrophones*
XING Chuan-xi1,2, PIAO Sheng-chun1,2, SONG Yang1,2
(1.Science and Technology on Underwater Acoustic Laboratory,Harbin Engineering University,Harbin 150001,China;2.College of Underwater Acoustic Engineering,Harbin Engineering University,Harbin 150001,China)
A self-contained ocean acoustic measurement system is designed in the form of vertical array,based on digital hydrophones.The system consists of multiple digital hydrophones,which are connected to each other via cable.The number of elements and distance between each element can be adjusted.The collected datas are either stored or uploaded in real time by digital hydrophones,and high-speed serial data transmission system is optimally designed based on RS—485 bus,rising/falling edges of serial signal enable bit synchronization time-clock recovery,and data frame is realized with the 8 B/10B encoded mode,and bus provides remote data transmission along twisted-pair cable at the transmission rate of 15 MB/s,and a primitive synchronization scheme is also given on the bus in reference to IEEE 1588 timing protocol,whose synchronization the maximum error is 0.5 μs.Finally,tests prove that the acquisition effect is good,the system is reliable,with low overall power consumption and each array element is accurate and synchronous,and it can be widely used in underwater array element measurement.
vertical array; digital hydrophones; measurement of ocean-acoustics
10.13873/J.1000—9787(2014)12—0110—04
2014—05—15
国家自然科学基金资助项目(11104044,11104045)
TB52
A
1000—9787(2014)12—0110—04
邢传玺(1982-),男,黑龙江加格达奇人,博士研究生,主要研究方向为水声信号处理。