激光导引头四象限探测器偏差信号特性研究
2014-07-13梁巍巍黄振宇张文攀殷瑞光刘艳芳
梁巍巍,黄振宇,张文攀,殷瑞光,刘艳芳
(中国洛阳电子装备试验中心,洛阳471003)
引 言
从近几次的世界局部战争可以发现,光电精确制导武器在战场上发挥着越来越重要的作用,其中半主动激光制导武器以其高精度、低成本成为使用频率最高的光电精确制导武器[1-3]。半主动激光制导武器主要依靠武器前端的激光导引头起作用,四象限探测器(quadrant detector,QD)是导引头的重要组成元件,主要负责搜索和捕获目标的漫反射信号,传给后续信息处理电路形成制导指令,导引激光制导武器实现精确打击,因此,其性能参量直接影响着激光制导武器的精度[4-5]。参考文献[6]中分析了传统四象限测角算法等几种测角算法在计算四象限探测器偏差信号的性能;参考文献[7]中针对四象限探测器的解算偏差信号精度问题,研究了基于不同光斑模型计算方法存在的误差;参考文献[8]中研究了四象限探测器测角算法基础上,提出了一种将插值法和传统算法相结合的改进算法,该偏差信号解算算法可有效提高探测定位精度且工程上易实现[6-8]。从相关报道可看出,四象限探测器偏差信号是影响激光导引头探测定位精度的关键,本文中从四象限探测器探测定位原理出发,通过研究偏差信号与入射光斑大小、探测器分划线宽度和背景光强度的关系,提出了对应的优化建议,研究结果有助于提高激光导引头的探测定位精度。
1 四象限探测器探测定位原理
为了对目标进行定位,四象限探测器相对光学系统离焦放置。在激光导引头搜索跟踪目标过程中,由目标漫反射的激光指示信号经光学系统汇聚在四象限探测器光敏面上,形成目标光斑。如图1所示,为四象限探测器光敏面示意图,四象限探测器被中间的间隔分为4份,象限之间的间隔被称为“分划线”,分划线对入射光没有响应[9]。
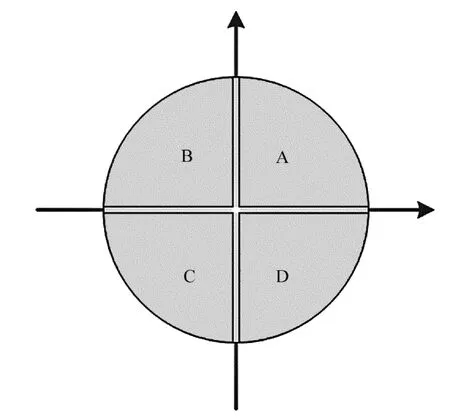
Fig.1 Schematic diagram of facular on quadrant detector
四象限探测系统通过目标光斑在4个象限上的分布情况,来解算目标在空间的位置。如图2所示,为四象限探测器和差比幅电路原理图,其中,A,B,C,D分别代表四象限探测器4个象限,UA为入射光斑在A象限产生的光电压(其余相同)。当目标光斑的几何中心落在探测器的某一象限上,经过信息处理电路对信号的处理,输出导引指令到尾部仪器舱,控制激光制导炸弹舵面偏转,修正弹体的实际飞行方向与理想的追踪方向间的偏差,使误差角减小并逐步趋于0,最终控制激光制导炸弹按导引规律飞向目标。
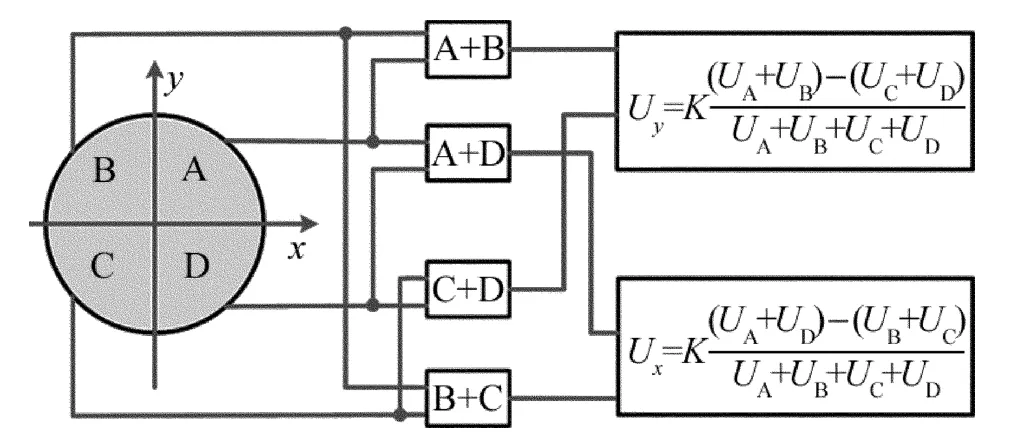
Fig.2 Block diagram of orientation detection circuitof quadrant detector
假定目标漫反射激光指示信号在四象限探测器上形成圆型光斑,半径为r,光斑能量分布均匀,光斑中心坐标(x,y),则俯仰和偏航方向的偏差信号为[4]:
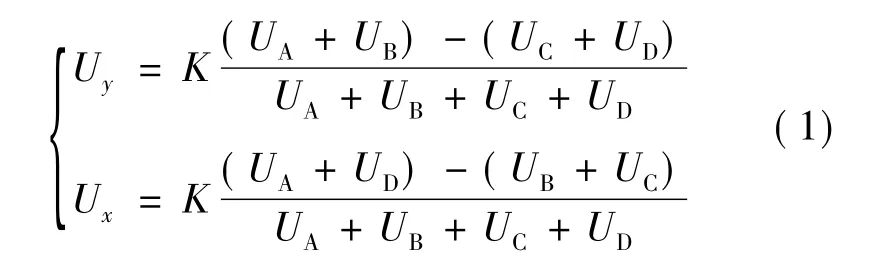
式中,Ux和Uy分别为四象限探测器x方向和y方向偏差信号电压;K为比例系数。
导引头信号处理一般采用和差比幅电路,以便对输出信号进行归一化处理。由于各象限输出的光电流值与接收到的目标反射能量有关,而这一量是随着探测系统到目标的距离变化的,这就加大了对后续电路动态范围的要求,采用和差比幅电路可以消除上述影响。俯仰和偏航方向的偏差信号仅取决于各象限上目标光斑的面积之差。于是,(1)式可改写为:

由(2)式可得,只要测出A,B,C,D这4个象限的输出信号和光斑半径r,即可求得目标光斑中心在四象限探测器光敏面上的位置(x,y)。
2 四象限探测器输出偏差信号特性研究
2.1 入射光斑大小
由(2)式可以看出,偏差信号不仅和入射光斑中心的位置有关,而且还和入射光斑的大小r有关。由于四象限探测器分划线的影响,存在最小入射光斑,即入射光斑小于最小光斑时,若光斑落入四象限探测器分划线内,则探测器没有制导信号输出,如图3所示,假定四象限探测器分划线宽度为2a,则入射光斑半径r至少应满足:

当光斑太大,覆盖了整个探测器的4个象限,这样即使光斑中心不在四象限探测器的中心,俯仰和偏航方向的偏差信号输出都为0,系统也会判定为光斑在探测器中心,不输出制导指令,这显然也是一种误判。
如图4所示,为不同入射光斑大小情况下,四象限探测器输出偏差信号归一化曲线,四象限探测器x方向的偏差信号电压Ux和偏移量x均经过归一化处理,归一化后的范围为-1~1,r为入射光斑半径,R为探测器光敏面半径。当入射光斑比较小时,偏差信号Ux的变化范围会比较大,但是偏移量x变化范围比较小,如当r/R=1/4时,偏移量x的变化范围为-0.3~0.3,偏差信号Ux随偏移量x变化剧烈,偏移量有一个小的改变,偏差信号Ux就会有明显的变化,这说明探测系统灵敏度很高,可以探测到微弱的信号变化,但是探测器的线性范围比较小。入射光斑半径慢慢增大到r/R=1/2时,偏移量x的范围为 -1 ~1,线性范围约为 -0.9 ~0.9,偏差信号变化范围Ux为-1~1,偏差信号Ux随偏移量x变化变慢,但是探测器的线性范围比较大;当入射光斑增大到r/R=3/4时,偏移量x的线性范围为-1~1,偏差信号 Ux变化范围约为 -0.45 ~0.45,偏差信号随偏移量x变化太慢,对偏移量变化不够灵敏,导致探测器的灵敏度下降。
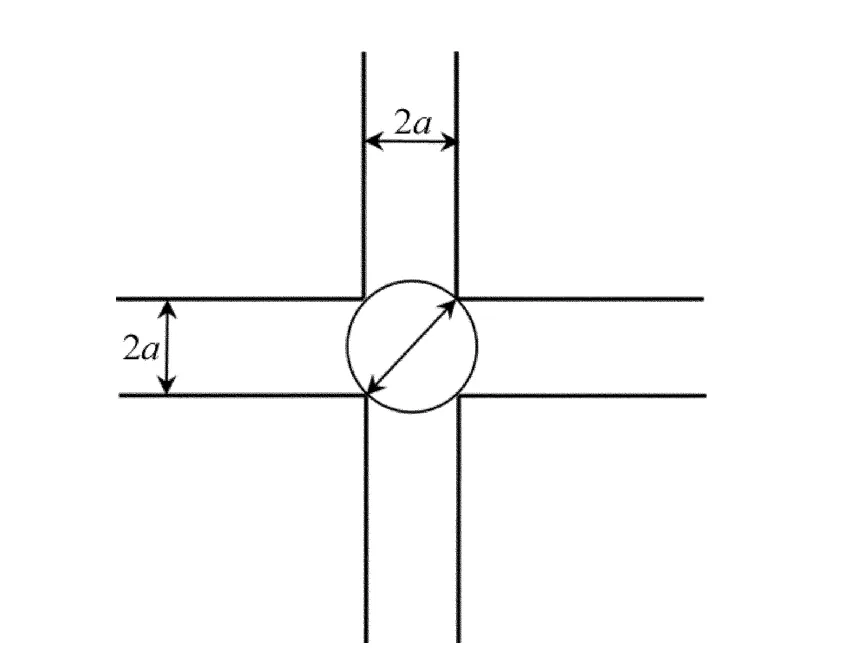
Fig.3 Schematic diagram of minsize of light spot on quadrant detector
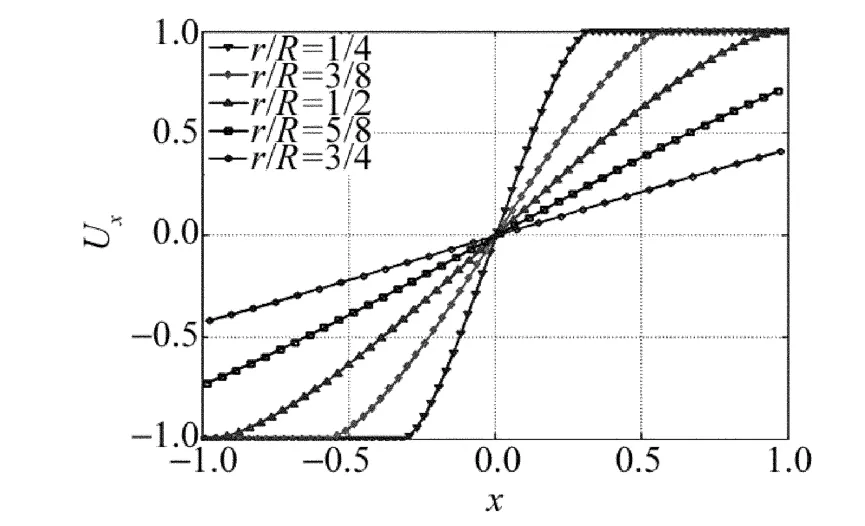
Fig.4 Normalized curve of error signal in different size of light spot
图5 为不同入射光斑大小情况下,计算出的光斑中心与偏移曲线的斜率之间的关系。横轴为光斑偏移量x,纵轴为偏差信号Ux的斜率。随着入射光斑半径的增大,偏移量曲线的斜率在不断变化,即偏移信号与偏移量之间的关系不是线性的。可以看出,随着光斑半径的增大,斜率的最大值减小,斜率由最小值达到最大值时相对的偏移量增大,即四象限探测器的灵敏度降低了。同时,随着光斑半径的增大,偏差信号与偏移量的范围增大,即四象限探测器的动态跟踪范围增大。

Fig.5 Relationship of the facular center and the slope of error signal in different size of light spot
由上可得,随着入射光斑半径r的逐渐变大,四象限探测器的灵敏度会变低,动态跟踪范围变大。四象限探测器的选择既要考虑探测器的灵敏度,又要考虑其线性范围,对这两项指标进行综合考虑,选取合适的光斑尺寸。
入射光斑的大小由导引头光学系统决定,在实际应用中,激光导引头光学系统经过特殊设计,可以控制入射激光光斑半径是光敏面半径的一半左右,即在r/R=1/2附近时,4个探测器每一个都能接收到入射光斑的一部分能量,四象限探测器具有较好的动态范围和较高的探测灵敏度,探测系统可以获得较好的综合性能。而光学系统参量的确定与很多因素有关,比如弹的制导率(比例导引或速度追踪)、攻击的目标类型(固定目标,慢速目标或活动目标)等。光学系统参量一旦确定,那么目标在探测器光敏面上的目标光斑就基本不变,只有当弹目距离非常近时,目标入射光线相对导引头光学系统不能近似为平行入射光线时,入射光斑才会有较大变化,甚至会覆盖探测器整个光敏面,此时,系统就不能给出正确的制导指令,弹体进入截断距离,断掉制导指令信号。
2.2 分划线宽度
由于四象限探测器是在同一块硅基底上采用半导体工艺,制作出性能基本一致的4个探测器。为了隔离4个探测器,通过腐蚀、掩膜和掺杂等工艺形成了探测器间的分划线,由于采用同一块硅基底,不可避免地会出现串扰。四象限探测器分划线为了满足系统探测精度的需求,不能做得太宽,另一方面,为了避免象限间信号串扰,也不能做的太狭窄。四象限探测器分划线宽度因光敏面直径不同而有所不同,分划线宽度约为几百微米,串扰约5%。为了分析分划线宽度对探测定位精度的影响,研究了不同宽度分划线对输出偏差信号的影响,如图6所示。

Fig.6 Normalized curve of error signal in differentwidth of division line
为了研究不同探测器分划线宽度下,探测器输出偏差信号归一化曲线,假设入射光斑r/R=1/2,从图中可以看出,当分划线宽度2a/R=1/40时,探测器的线性响应范围约为-0.9~0.9;随着分划线宽度逐渐变宽,探测器的线性范围逐渐变小,当分划线宽度2a/R=9/40时,探测器的线性响应范围迅速减为-0.5~0.5,线性响应范围有了明显的减小,并且入射光斑落入分划线的几率也变大,光斑落在分划线内损失的能量也越来越大,探测器输出线性度变差,位置偏差变化剧烈,使探测系统误差变大。随着分划线宽度的变化,探测器的最大偏差位置也在变化。因此,分划线宽度应在探测器串扰允许的情况下越窄越好,在这种情况下,探测器的串扰度和一致性参数就显的非常重要。
2.3 背景光强度
在四象限探测器探测信号过程中,背景光是影响输出偏差信号的因素之一。背景光主要来源于自然光源(如太阳)、复杂的光电环境和通过光学系统在光敏面上的其它漫反射信号[10-12]。已经有相关新闻报道,由于射击时没有考虑到太阳光因素,导致我军列装的某型激光制导炮弹偏离目标千米之远[13]。背景光特别是太阳光信号被激光导引头接收,虽然激光导引头的窄带滤光片能够滤除大部分太阳光信号,但由于窄带滤光片具有一定的带宽,一般在工作波长1.06μm附近具有约20nm带宽,所以仍然有一部分太阳光信号被探测器接收,导致激光导引头的探测器输出较大的暗电流和电流噪声。虽然探测器放大电路中的隔直电路能够滤除直流分量,但探测器的电流噪声能够经前置放大电路、主放大电路放大后被信息处理电路处理,从而降低导引头探测器的信噪比,甚至使目标散射的指示激光信号淹没在噪声中。因此,需在分析探测器性能时考虑背景光的影响。
根据和差比幅电路公式(1)式可知,背景光的存在,使UA+UB+UC+UD在很大程度上增加,但是对于(UA+UB)-(UC+UD)和(UA+UD)-(UB+UC)几乎没有影响,探测器输出偏差信号在一定程度上有所减小。假设背景光均匀分布,入射光斑r/R=1/2,背景光强度与入射激光强度之比为0,10%,20%和30%情况下探测器输出偏差信号归一化曲线,如图7所示。
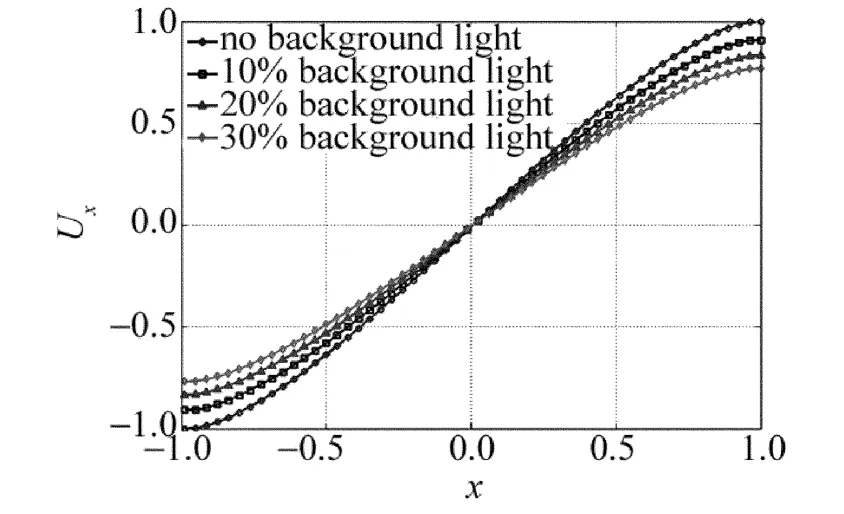
Fig.7 Normalized curve of error signal in different intensity of background light
由图7可知,随着背景光的增强,偏差信号的线性范围在减小,斜率在降低,说明探测器的探测灵敏度在降低。
背景光的存在,干扰了探测器定位,使探测器灵敏度明显下降,必须采取各种措施进行有效抑制。对于光谱上不同波段可以通过加窄带滤光片的方式,来减小背景光带来的影响;对于同波段的信号,可以通过数字信号处理的方式,如电路上采用频率分离的方法抑制;最后就是对四象限探测器采用标准调校的方式,对归一化曲线进行调零校准,也可以进一步抑制背景光对偏差信号的影响。
3 结论
根据四象限探测器偏差信号形成的原理,深入研究了其与光斑位置大小、分划线宽度和背景光强度的关系,分析了影响激光导引头四象限探测器探测定位精度的因素。
(1)随着入射光斑变大,四象限探测器的灵敏度会变低,动态跟踪范围变大。入射光斑在r/R=1/2附近时,可以获得很好的综合性能,此时,四象限探测器具有较好的动态范围和较高的探测灵敏度。
(2)分划线宽度应在探测器串扰允许的范围内做的越窄越好,应该对探测器的一致性和串扰做进一步考核。
(3)背景光的存在会使四象限探测器的灵敏度降低,应该采取措施抑制背景光。
通过研究不同条件下对四象限探测器输出偏差信号的影响,分析了影响激光导引头四象限探测器探测定位精度的因素,研究结果有助于提高激光导引头的探测定位精度。作者接下来将进一步研究四象限探测器偏差信号对激光制导武器精度的影响,建立导引头全数学模型,分析评估各种因素对半主动激光导引头的干扰效果。
[1]WANGW F,LIU ZG,WANGSC,etal.Design ofenergy simulation system for laser guided weapons [J].Laser Technology,2012,36(6):844-848(in Chinese).
[2]WANG K B.Status quo,key technology and development of laser guided weapon [J].Infrared and Laser Engineering,2007,36(5):651-655(in Chinese).
[3]WANG K B.Latest development and trends of semi-active laser guidance technology[J].Infrared and Laser Engineering,2008,37(9):275-279(in Chinese).
[4]XU D S.Optimal design for signal light spot of detecting systems with quadrant detectors[J].Journal of Hunan Institute of Science and Technology(Natural Sciences Edition),2007,20(1):50-53(in Chinese).
[5]GAO Z J,ZHANG A J,SHIG H.Simulation study on the seeker of aerodynamically stabilized laser-guided aerial bomb [J].Opto-Electronic Engineering,2007,34(1):4-8(in Chinese).
[6]HU X L,ZHOU S C.Analysis and research on several anglemeasurement algorithms based on four-quadrant detector[J].Laser& Infrared,2007,37(6):546-547(in Chinese).
[7]CUIR J,WANG JW,LIX M.Model error analysis of quadrant photodetector[J].Laser& Infrared,2011,41(5):516-519(in Chinese).
[8]CHEN Y,ZHU TR,LIH G.Analysis and improvement in anglemeasurement algorithm of the four-quadrant detector[J].Laser &Infrared,2009,39(6):669-672(in Chinese).
[9]CHEN Y,ZHU T R,LIR.Design and realization of the anglemeasurement algorithm of the four-quadrant detector based on the interpolation algorithm [J].Infrared and Laser Engineering,2011,40(3):544-547(in Chinese).
[10]KUANG C F,FENGQ B,LIU B.Study on background light influences on four-quadrant detector[J].Laser & Infrared,2004,34(6):493-495(in Chinese).
[11]LISW,ZHANG JL,HAO J,et al.Elimination of the interference of bias light for laserwarning systems[J].Laser Technology,2012,36(5):642-644(in Chinese).
[12]HAN C,BAIB X,YANG H M,et al.Study four-quadrant detector in the free space laser communication[J].Chinese Journal of Lasers,2009,36(8):2030-2034(in Chinese).
[13]JIA Q L.New-style shell hit the targets.[EB/OL].(2012-11-06).http://news.xinhuanet.com/mil/2012-11/06/c_123919 630_2.htm(in Chinese).