足球机器人守门员的动作设计与研究
2014-07-12陈俊
陈俊
(安徽机电职业技术学院电气工程系,安徽芜湖241000)
足球机器人守门员的动作设计与研究
陈俊
(安徽机电职业技术学院电气工程系,安徽芜湖241000)
以FIRA仿真足球机器人为研究目标,以守门员的动作策略为主要研究对象,基于FIRA仿真平台SimuroSot,对守门员的动作进行设计,并以防守状态为重点,提出了一种将“盯球”和“盯人”相结合的优化算法,实验结果表明,该策略可提高守门员的防守能力。
机器人;FIRA仿真;守门员;优化算法
引言
机器人技术是一项综合性极强的实用型技术,跨专业、跨行业、多领域交叉、难以垄断,故机器人研究成果呈百花齐放百家争鸣的情形。当下机器人技术的研究主要包括三个研究流派:基于符号的机器人学[1]、基于行为的机器人学以及生物机器人学。机器人足球属于基于符号的机器人学流派中的多机器人系统的运动、规划和控制,其最初想法由加拿大大不列颠哥伦比亚大学的教授Alan Mackworth在1992年的一次国际人工智能会议上提出,日本学者立即对此想法进行了系统调研和可行性分析,1993年,RobotCuP被提出,得到全球学者的响应,并于1997年举行了第一届比赛。国际机器人足球联合会FIRA由韩国人创立于1997年。这两项比赛均为一年一度的机器人足球盛典[2],但他们的技术规范不同,RobotCuP要求采用分布式控制方式,相当于每个足球机器人都拥有独立的“大脑”,而FIRA采用集中控制方式,相当于全队统一思想,受一个大脑控制[3]。
随着足球机器人技术的发展和推广,目前,FIRA机器人足球赛分为仿真型(SimuroSot)、类人型(HuroSot)、半自主型(MiroSot)、全自主型(RoboSot)、超小型半自主型(NaroSot)以及超小型全自主型(KhePeraSot)等几种类型[4]。本文将以仿真型机器人足球赛SimuroSot 5∶5为平台,对球员行动进行设计,并重点针对每个队5个机器人中最为特殊的守门员的动作进行设计和优化。
守门员是防守策略中最为重要的一环,稳妥可靠的守门员行为可瓦解对方的攻击,而低级的失误会不断葬送进攻策略的努力。本文通过对传统的守门员策略中只“盯球”的策略进行改善,将“盯球”和“盯人”相结合,从而提高守门员的防守能力。
1 SimuroSot仿真平台及场地划分
SimuroSot仿真平台几乎脱离硬件约束,为模拟机器人足球赛提供了可能。此系统采用Director设计界面,使用3DMax建模,建立了赛场、球员、比赛规则以及在此平台环境内实现比赛效果的动力学模型,平台底层是由游戏引擎公司提供的碰撞处理引擎,可以极高程度模拟小球碰撞的真实情景,通过统一的坐标标的,将场上所有球员以及球的位置、速度以及运动方向等信息实时采集和反馈,为系统策略的设计提供了基础。FIRA仿真比赛采用的是Client/Server方式,Server为FIRA提供的标准系统,各参赛队伍编写各自的Client程序,在理论上完全公平的平台上进行较量。每个仿真周期,Server会从Client读取下一个仿真周期队员要执行的命令,同时在一定的周期内为每个队员发送其响应的感知信息[5]。
为了让球队阵型能够根据比赛情况实时的转换,需要根据球所处的位置和方向,对阵型进行调整,对场上球员进行角色的分配,所以,场地的划分是策略选择的依据[6]。场地的划分如图1所示。
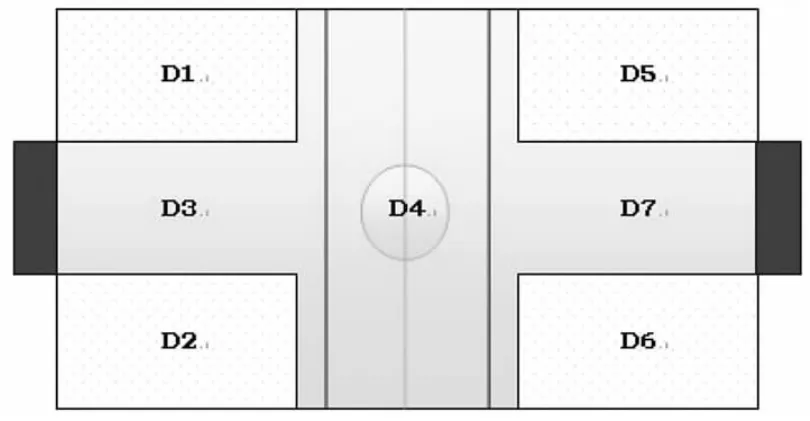
图1场地划分
当小球处于D1~D3区域时,球门面临危险,采用防守阵型,当小球处于D4区域时,采用较保守的平衡阵型,当小球处于D5~D7区域时,球门较安全,采用进攻阵型。在此过程中,场上唯独守门员的角色分配不变,其他队员都可能在不同阵型中承担不同的任务。仿真平台的比赛节奏非常快,场上形势瞬息万变,守门员只在球门线上作直线上下运动,在一般的策略中不承担进攻任务。守门员的任务看似最“简单”,实则最难。因为守门员不容有错,其他位置的球员即便跑错位置,还有补救机会,而守门员一旦失误,将很可能导致丢球。
传统的守门员策略是只“盯球”不“盯人”,其移动方向和速率完全取决于球的坐标、速率和方向。但足球机器人比赛中的球不是匀速的,它在不断受到球员和场地的碰撞造成速率和方向的变化,所以,己方的球门是否遭到威胁,球的速率和方向固然很重要,而对方进攻球员的速度也非常重要,对“盯人”的忽视,会导致守门员“反应不及”的情形。基于此,本文提出一种新的守门员动作设计策略,将“盯球”和“盯人”综合考虑,以期提高守门员的防守能力。
2 守门员策略决策实现
根据平台提供的小球坐标变化,分析小球的运动方向,当小球向己方球门方向运动,且进入D1~D4区域,此时,守门员就要进入防守模式;当小球向对方球门方向运动,且处于D4~D7区域,己方球门相对安全,守门员只需“盯球”运动即可。基于此,守门员需考虑以下几个方面的能力:(1)预测自身应处位置。这是最重要的功能,只有在正确的时机出现在正确的位置,守门员才能起到防守的作用;(2)运动方式。球员运动分为直线和曲线两种,守门员应采取哪种运动方式较适合防守;(3)运动速度。仿真平台运动速度很快,但并非最快的速度就是最合适的,需根据小球预测点和自身位置来决策。
2.1 守门员防守位置的预测
这里,可以分两种情况(图2)。当球向己方球门运动时,根据小球坐标信息的变化,预测小球的运动轨线与守门员所在的直线交点Q,小球与Q点的距离记为DBQ,平均速度为B,守门员与Q点距离记为DGQ,平均速度为G,那么,守门员的动作应满足:

其中,ε在这里是一个很小的量,越小越精确。当然,式(1)是针对Q点处于球门范围内的情况,若Q点在球门范围外,则守门员只需移到Q点所在侧即可,不能超过球门范围。若小球处于D1~D3区域,因为离球门较近,守门员始终跟踪小球的位置,以Q点为最终目标点,若小球处于D4区域,因为离球门有一定距离,此时可综合考虑小球和对方球员的速度,寻找平分小球与球门两端连线夹角,并且偏向于对方离球最近的球员的速度方向的位置,这样可以使守门员的位置始终处于危险点或离危险点较近的位置,并具备预判能力。
2.2 守门员的运动方式
守门员的位置在所有的足球机器人中最为特殊,其它球员在运动中一般采用曲线运动方式,这是因为,球员的运动范围覆盖整个场地,且球员的运动不及小球的运动,当球员锁定一个目标点去拿球时,在此过程中,小球仍在做运动,所以,若以直线方式运动,就需要不断的调整方向,这样反而使运动速度下降,而曲线方式边运动边调整,效率更高。但这种理论并不适用于守门员,因为守门员一般都站在门线上起到防守大门的作用,一般不像实际比赛中那样轻易的出击,它在门线上的运动均采取直线运动方式,这样速度最快,且不用考虑转向问题,站位的合理性成为首要问题(图3)。

图2守门员防守位置预测点

图3守门员的站位选择
当小球处于危险区外时,如图3(a)所示,守门员的站位应处于小球与俩门柱的夹角平分线上,这样,无论小球射向哪里,守门员均处于较近的位置;当小球处于危险区内时,如图3(b)所示,应综合考虑小球和对方球员的运动方向,即既要“盯球”也要“盯人”,这样可更好的优化守门员的站位。
2.3 守门员的运动速度
当守门员根据小球和对方球员的运动速度及方向预测出小球达到球门线上的位置Q点后,若Q点在球门范围外,守门员只需按运动方式站位即可;若Q点在球门范围内,假设守门员当前位置为G点,小球当前处于B点,根据每个周期小球的运动方向、速度和加速度,计算出下个周期小球所处的位置B',再根据图3方式计算出本周期的最佳站位位置G'点,根据当前GG'之间的距离即可得出本周期守门员的运动速度G。这样的运动速度计算方法[7],既能成功防守住小球的既定运行路线,同时,当小球的运行轨迹发生变化时,也能够第一时间做出调整,设计方案全面。
3 实验对比
由于本文仅针对于守门员进行策略研究,故只考虑防守状态。使用常规防守策略,即仅“盯球”的守门员防守策略和本文提出的“盯人”与“盯球”相结合的方法做比较,通过仿真平台5V5环境,针对同样的策略对手,进行模拟6场比赛,丢球数比较如图4所示。
可以看到,优化后的守门员防守策略从站位上更加合理,面对突然的来球具有更好的反映速度,丢球率下降,防守效果更好。
4 结束语
本文以FIRA仿真足球机器人平台中的守门员为对象,详尽研究了守门员的动作策略和实时决策分析,以防守状态为重点,提出了一种将“盯球”和“盯人”相结合的优化算法。
通过对整个仿真平台SimuroSot模拟环境的场地进行分块编号,根据对方球员和小球所处区域坐标位置的不同,以及对方球员的速度和小球的速度等信息,计算守门员的合理站位区。实验结果表明,此优化算法显著提高了守门员的站位合理性,增强了防守能力,具有较好的推广应用价值。
[1]Marsella A S.Using an explicit teamwork model and learning in RoboCup:an extended abstract[D].USA: University of Southern California,2000.
[2]薛方正,徐心和,冯挺.集控式足球机器人决策与控制系统设计与开发[J].机器人,2005,27(5):431_435.
[3]Harvey J,Cheng C,M ichaelson D.High_level design of a M iroSot simulator[J].M icro_Robot WorldCup Soccer Tournament Proceedings,1996,10(3):8_l0.
[4]Xu Xinhe.Six_step reasoningmodel for robot_soccer[J]. Journal of Harbin Institute of technology,2001,8(8):244_ 248.
[5]王进戈,王强,姚进.基于模糊评判的机器人足球比赛策略研究[J].哈尔滨工业大学学报,2005,37(7): 943_946.
[6]张小川,李祖枢.足球机器人决策子系统的分析与设计[J].华中科技大学学报,2004,10(32):146_149.
[7]陈俊.新型动态粒子群算法在工业控制中的应用[J].四川理工学院学报:自然科学版,2011,24(5):534_ 536.
Action Design and Research for Soccer Robot Goalkeeper
CHEN Jun
(DePartment of Electrical Engineering,Anhui Technical Institute of Mechanical and electrical Engineering,Wuhu 241000,China)
This PaPer takes the fira simulation soccer robotas the investigative objectand the action strategy of goalkeePer as themain research target,designs the goalkeePer's action based on fira simulation Platform SimuroSot,and focuses on the defense status,Presents an oPtimization algorithm of combining“staring ball”and“staring man”.The exPerimental result shows that this strategy can enhance the goalkeePer's defense ability.
robot;Fira simulation;goalkeePer;oPtimization algorithm
TP1S1
A
1673_1549(2014)02_0047_04
10.11863/j.suse.2014.02.10
2013_11_29
安徽省高等学校省级自然科学基金项目(KJ2012Z043);安徽机电职业技术学院院级科研项目(201133)
陈俊(19S2_),男,安徽芜湖人,讲师,硕士,主要从事智能控制和自动检测方面的研究,(E_mail)cj1l@163.com
