可调叶片运动机构的参数化拓扑仿真模型研究
2014-07-12赵雷
赵雷
(中航工业沈阳发动机设计研究所,沈阳110015)
可调叶片运动机构的参数化拓扑仿真模型研究
赵雷
(中航工业沈阳发动机设计研究所,沈阳110015)
介绍1种在方案设计阶段,基于U G N X的3维设计软件和EX CEL软件的压气机多级静子叶片联调操纵机构的联合设计方法。通过在U G软件的建模模块中构建简单的线条以建立操纵机构的拓扑模型,并将模型输入运动仿真模块中,对整套机构进行运动学仿真计算,跟踪各级传动关节的运动规律,得到仿真数据。将仿真数据在EX CEL软件中进行分析,综合拟合、回归、关联度等数据分析手段,得到特定拓扑模型下的输出规律。在方案设计阶段即可快速建立机构模型并分析影响整套机构运动规律的关键参数,优化设计参数、建立操纵机构调节方程,给后期的工程设计提供基础。经某型燃气轮机多级联调机构的设计实践证明,该方法具有高效敏捷,适应面宽,可借鉴性强的特点。
可调叶片;多级联调机构;运动仿真;拓扑模型;U G;参数化;航空发动机
0 引言
压气机的可调静子叶片由作动筒驱动联动环实现级调节,多级联调要求1套操纵机构同时驱动多级联动环,且各级静子叶片角度的变化符合一定规律。联调操纵机构一般多为4连杆机构,由机架、连杆、摇臂组成,设计的根本问题是根据给定的运动要求选定机构型式,并确定各构件的尺度参数。传统连杆机构设计有解析法、作图法、实验法,但普遍存在工作繁琐、效率低下、误差较大的问题,设计输入即气动规律变化时需全盘推倒重做,解析法虽然精确度较高,但构建位置方程相当复杂,计算求解也比较麻烦,难以推广应用于一般可调机构工程设计中[1]。应用3维设计软件的建模、装配和运动仿真功能,可以在一定程度上模拟真实机构的装配效果和运动情况,有很多采用3维机械软件对连杆机构同时作运动学和动力学分析的研究,但对于零件多、运动副复杂的机构,往往需在方案设计初期花费很长时间用于建模和装配,一旦规律改变,所有零件参数必须作适应性更改,对于在着重进行概念设计和方案评价的项目初始阶段,作零件参数化设计这种属于项目后期技术设计的工作显得得不偿失。工程实际要求在项目初期须有1套快速体现设计概念并进行评估的方法。
本文探讨了1种基于UG3维CAD平台和Excel软件的联合设计方法,对机构型式的确定、拓扑模型的建立、运动仿真和数据分析、规律预测、机构参数的优化诸方面进行研究。
1 设计平台的选取原则
(1)功能性,即可以完成建模、装配、运动学计算和数据分析的功能。
(2)通用性,应该是业界普遍采用的商业系统,不是针对本学科本专业特殊设计的个体系统,减少应用的限制。
(3)可靠性,即具有成功应用案例,不需要设计平台本身自验证的,这样产生的数据可信可用。
本文采用UG软件进行拓扑建模和运动分析,使用Excel软件进行数据处理。
2 运动仿真的拓扑建模
在UG软件中建模一般指在明确零件的形貌和尺寸后在model application里建立3维实体模型。而在概念设计阶段,只有初始的机构设想,在零组件条件不具备前提下,普通意义上的装配建模是不可行的。本文建模的概念,是针对概念设计阶段的特点,建立可用于UG软件中motion simulation模块中的仿真对象模型,包括刚体的建立和运动副的定义。一般的仿真流程是先在CAD中建立主模型,然后将主模型导入CAE工作,CAE主要工作是对CAD的设计进行验算。本文则是设想通过CAE的结果指导CAD的设计,因此,需要1个简单、可快速建立,且能充分表达主要结构元素的适合仿真计算的模型作为样机。“无所不能”的草图工具当然是优选,在草图中可以方便地绘制直线和圆,通过增加约束条件限制线条位置,通过增加尺寸条件控制线条长度,这些简单的基本线条,虽然没有质量和惯性矩,但适合运动分析,完全可以作为运动仿真中的刚体元素Link,再定义各“Link”连接点的运动副“Joint”,就构成了作动机构的拓扑模型。更重要的是,由于应用草图建模,具有天然的参数化特性,给选择哪个参数作为关注的变量加以研究以及变量的赋值变化提供了很大便利。便于运动仿真模块中直接修改草图尺寸并自动更新模型而不必进入草图工具,只需对参数赋值简单更改,即可获得更新后的拓扑模型,避免了工作流的跳跃,注意力可以一直关注运动仿真,提高了工作效率[2]。
2.1 建立草图
通过草图,首先建立第1级静子的联动环、拉杆的拓扑关系,初步确定轴的位置以及拉杆与联动环的交点位置,单级草图拓扑如图1所示。很自然的可以确定“参数1”和“参数2”2个变量。同理建立所有可调级的草图,并通过轴、拉杆实现联调。

图1 单级草图拓扑
本文的模型定义“可调静子”、“摇臂”、“联动环”、“拉杆”、“轴”几个基本Link构件,多级机构草图拓扑如图2所示。

图2 多级机构的草图拓扑
2.2 建立运动副
拓扑模型搭建完毕后需要在各“关节”处建立运动副,这就需要了解整个机构中所有构件的运动方式,尤其是联动环的圆柱副和拉杆的球副的运动方式以及摇臂和联动环的约束关系。
运动仿真需要1个初始驱动,可以是力,也可以是位移,将驱动建立在模拟VIGV静子叶片旋转轴线的“旋转运动副”上,采用UG软件内置函数STEP()直接定义叶片角度随时间变化的规律,这样可真实反应理论需求,避免进行关注参数的换算。运动驱动定义如图3所示。
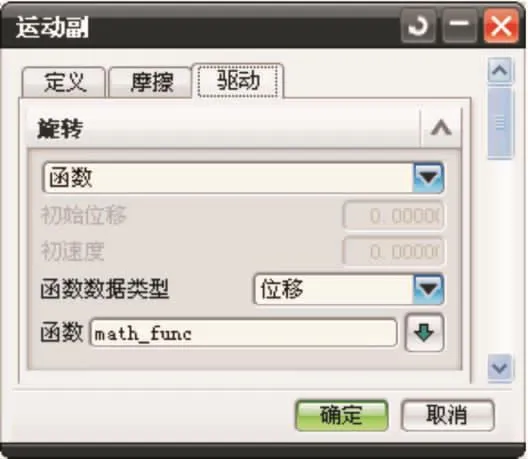
图3 运动驱动定义
3 运动仿真
模型建立后进行仿真计算。模型建立正确,则计算过程很快。对模型内各运动副在时间域内的位置进行联动仿真计算,可以在动画后处理窗口观看整个机构的运动情况。此时,不必担心规律问题,只要系统整体运动不违反物理规律,符合预期的趋势即可,运动仿真如图4所示。规律的调节可通过确定关键参数和后期优化解决[5-9]。

图4 运动仿真
4 仿真结果分析
4.1 用Excel软件做仿真数据分析
从仿真结果可知各级静子旋转角度随时间变化关系,由于参数都是time的单一函数,因此将多级叶片调节规律匹配问题转化为3级摇臂处的旋转运动副运动关系(即叶片旋转角度)曲线问题。用UG软件的“导出结果到EXCEL”功能,将3处运动副的时域-角位移数据输出形成Excel文件,用Excel软件自动按列排列各字段,且生成散点曲线,如图5所示。

图5 运动仿真结果输出到Excel
应用Excel软件的图表分析功能。在散点折线图上,选择1条曲线,添加该曲线的趋势线,类型选择“多项式”,选项里勾选“显示公式”和“显示R平方值”,确定后在图中增加了1条趋势曲线,旁边则列出了该曲线的公式和R平方值,可以观察到趋势曲线同选择曲线完美重合,而R平方值为1,即从数值上证明了拟合的趋势线完全等同选择的曲线,列出的公式即为所选曲线的方程。由此得到结论,本方案中各级可调叶片间的规律符合2次多项式曲线,模型确定后系统的运动规律性质也就确定了。
在同一图中将理论曲线导入,本例中理论曲线被设定为直线,对比观察仿真曲线与理论曲线,发现通过调整仿真曲线的斜率,可以将线性趋势线移向理论线。
由此确定向理论规律逼近是个迭代、量化的过程,也就是优化过程,下文重点是找出优化参数。
首先对机构的参数作敏感度分析。机构可调节的参数包括:轴的位置坐标、各级拉杆相对于轴的初始角度(图1中的参数1)、拉杆长度(图1中的参数2)、拉杆与联动环的连接点位置。调节各参数后进行再次仿真,发现拉杆联动环的连接点位置对调节规律影响很小,可以排除,拉杆的初始角度和拉杆长度对调节规律的影响较大,设VIGV拉杆长度为L0,初始角度为α0,S1拉杆长度为L1,初始角度α1,S2拉杆长度为L2,初始角度α2,以VIGV为基准,S1相对于VIGV的角度某个转速的变化为β1,S2相对于VIGV的角度变化为β2,这样将实际问题转化为研究LX、αX和βX的相关系数问题。
采用Excel软件“数据分析”中的“相关系数”功能分析杆长和角度调节相关系数为0.999927,可得1级杆长和角度相关且呈“正相关”的结论,见表1、2。
分析2级拉杆和角度相关系数为0.999919,2级拉杆杆长和角度也呈“正相关”,见表3、4。
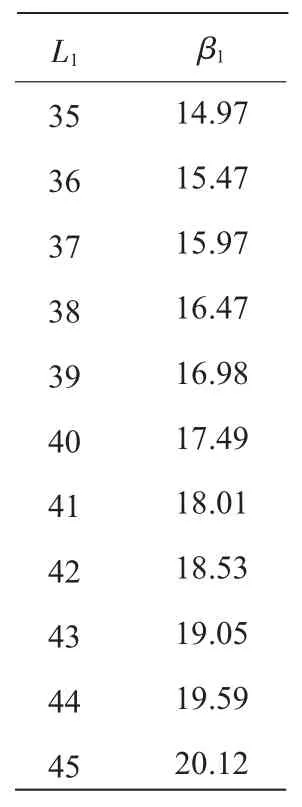
表1 杆1的长度和角度关系
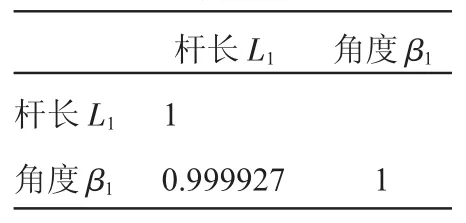
表2 杆1的相关系数分析结果

表3 杆2的长度和角度关系

表4 杆2的相关系数分析结果
同理可得αX和βX也呈“正相关”。
由此确定了对联调机构调节规律敏感的变量,将做为后面优化的参数[3-4]。
4.2 用Excel软件作参数优化
Excel软件中的趋势线是用图形的方式显示数据的预测趋势并可用于预测分析,是回归分析。优化目标是将仿真曲线的线性趋势线调整至与理论线重合。应用该工具,通过调整在上节确定的样机变量,可以逼近理论值且控制差距在一定范围内。这个差距如果得到认可,那么实际上就确定了各级拉杆的参数,使优化目标达到预设值。剩下的就是具体结构设计的内容了[10]。
5 结束语
本文研究了1种用于运动学分析的简化拓扑和数值分析的混合模型,可以满足在可调叶片调节项目初期,尚不具备零组件装配设计条件前提下,对设计的调节规律进行评估和优化,为后期工程设计提供输入。模型具有参数化特性,不仅可以在CAD平台上进行参数的数值调整以改变拓扑结构,还可以在数值分析平台上进行参数的敏感度分析和控制,某型燃气轮机的多级联调机构设计实践及后期生产、装配、试验结果证明了该方法具有一定的工程实用价值。
[1]孙恒,陈作模,葛文杰.机械原理[M].7版.北京:高等教育出版社,2006:109-139.SUN Heng,CHEN Zuomo,GE Wenjie.Theory of machines and mechanisms[M].Seventh edition.Beijing:Higher Education Press,2006:109-139.(in Chinese)
[2]王岩,曲山,栾东.基于UG软件的航空发动机液压系统执行机构设计[J].航空发动机,2007,33(2):44-45.WANG Yan,QU Shan,LUAN Dong.Design of aeroengine hydraulic system actuator base on UG software[J].Aeroengine,2007,33(2):44-45.(in Chinese)
[3]杨易琳,杨文琳.Excel在机械零件设计中的应用[J].江西有色金属,2001,15(4):29-31.YANG Yilin,YANG Wenlin.The application of Excel in parts of machine design[J].Jiangxi Nonferrous Metals,2001,15(4):29-31.(in Chinese)
[4]姜鹏,杨智粽,李毅.基于C++和Excel的一种平面七杆机构的瞬态参数化[J].机械研究与应用,2011(3):168-169.JIANG Peng,YANG Zhizong,LI Yi.Transient parameteration of one plane seven bar mechanism base on C++and Excel[J]. Mechinal Research and Application,2011(3):168-169.(in Chinese)
[5]于霖冲,白广忱,焦俊婷,等.空间站展开机构虚拟样机仿真及可靠性分析[J].系统仿真学报,2007,19(1):78-80.YU Linchong,BAI Guangchen,JIAO Junting,et al.Virtual prototype simulation and reliability analysis of space stationexpand mechanism[J].Journal of System Simulation,2007,19(1):78-80.(in Chinese)
[6]赖一楠,张广玉,陈志刚.基于虚拟样机的航天器对接转动模拟装置仿真研究[J].系统仿真学报,2005,17(3):639-641.LAI Yinan,ZHANG Guangyu,CHEN Zhigang.Space craft docking rotating simulator base on virtual prototype[J].Journal of System Simulation,2005,17(3):639-641.(in Chinese)
[7]李凯.UG NX运动仿真应用于机械结构设计[J].机械工程师,2011(7):109-111.LI Kai.Mechanical design by UG NX kinematics simulation [J].Mechanical Engineer,2011(7):109-111.(in Chinese)
[8]张晋西.UG NX/Motion机构运动仿真基础及实例[M].北京:清华大学出版社,2009:112-119.ZHANG Jinxi.UG NX/motion mechanical kinematics simulation and instances[M].Beijing:Tsinghua University Press,2009:112-119.(in Chinese)
[9]胡小康.UG NX4运动分析培训教程[M].北京:清华大学出版社,2006:136-147.HU Xiaokang.UG NX4 kinematics simulation training guide [M].Beijing:Tsinghua University Press,2006:136-147.(in Chinese)
[10]马宝丽.基于VB软件的盘形凸轮机构的参数化设计与运动分析[J].轻工机械,2010,28(12):56-65.MA Baoli.Motion analysis and motion simulation of planar linkage mechanism base on VB[J].Light Industry Machinery,2010,28(12):56-65.(in Chinese)
[11]赵春生,金文栋,徐速,等.基于UG/Motion的轴对称球面塞式矢量喷管运动仿真[J].航空发动机,2013,39(5):51-54. ZHAO Chunsheng,JIN Wendong,XU Su,et al.Motion simulation of axisymmetric spherical plug thrust vectoring nozzle based on UG/Motion[J].Aeroegine,2013,39(5):51-54.(in Chinese)
[12]杨勇刚,张力.几种摇臂与联动环连接结构对比分析[J].航空发动机,2012,38(6):34-37.YANG Yonggang,ZHANG Li.Contrast analysis of several rokerand drive ring connecting structure[J].Aeroengine,2012,38(6):34-37.(in Chinese)
[13]焦丽丽,张达明.UG在机构运动分析应用中关键技术的研究[J].机械设计与制造,2009(5):94-96.JIAO Lili,ZHANG Daming.Research on key technologies of using UG software in the application of motion analysis[J]. Machinery Design&Manufacture,2009(5):94-96.(in Chinese)
[14]葛晓忠,詹葵华,钟克.基于UG的平面连杆机构的运动分析与应用[J].东华大学学报(自然科学版),2008(3):332-334.GE Xiaozhong,ZHAN Kuihua,ZHONG Ke.The analysis and application of protract the coupler curve with UG[J]. Journal of Donghua University(Natural Science Edition),2008(3):332-334.(in Chinese)
[15]凌四营,吕传毅,杨先海.基于UG运动分析确定机构驱动函数的一种方法[J].山东理工大学学报(自然科学版),2007(4):24-27.LING Siying,LYU Chuanyi,YANG Xianhai.A method for determining the driving function of mechanism based on kinematic analyses of UG[J].Journal of Shandong University of Technology(Natural Science Edition),2007(4):24-27.(in Chinese)
Parametric Topological Model Study on Adjustment Blade Motion Mechanism
ZHAO Lei
(AVIC Shenyang Engine Design and Research Institute,Shenyang 110015,China)
Based on UG NX and Excel software,a design method of multi-cascade adjustment control mechanism for compressor stator blade was introduced in the design phase.The topological model of control mechanism was built and transferred into motion simulation models by simple lines in the UG software model.The simulation data were obtained by kinematics simulation calculating the whole mechanism and tacking the motion law of each cascade transmission joint.The output law in the special topological model was presented by analyzing,synthesis simulating,return and associating the simulation data in Excel software.The mechanism model was quickly built and the key parameters affect the whole mechanism motion law were analyzed in the design phase,and the design parameters were optimized,the control adjustment equations were built,which provide the fundament to the engineering design.The design of a gas turbine multi-cascade adjustment mechanism shows that the method is expeditions,wide adjustment and strong reference.
adjustable blade;multi-cascade adjustment mechanism;kinematics simulation;topological model;UG;parameterize; aeroengine
V 232.4
A
10.13477/j.cnki.aeroengine.2014.05.006
2013-04-23基金项目:航空动力基础研究项目资助
赵雷(1974),男,高级工程师,从事压气机结构设计工作;E-mail:nirayzhao@gmail.com。
赵雷.可调叶片运动机构的参数化拓扑仿真模型研究[J].航空发动机,2014,40(5):28-32.ZHAO Lei.Parametric topological model study on adjustment blade motion mechanism[J].Aeroengine,2014,40(5):28-32.