基于CANopen总线方式伺服定位控制系统研究
2014-07-11孙文慧乔卫斌天津水利电力机电研究所天津301900
孙文慧,乔卫斌(天津水利电力机电研究所,天津 301900)
1 概述
1.1 伺服电机
伺服电机又称执行电动机,在自动控制系统中,用作执行元件,把所收到的电信号转换成电动机轴上的角位移或角速度输出。伺服电机作为一个典型闭环反馈系统,主要靠脉冲来定位,伺服电机接收到1个脉冲,就会旋转1个脉冲对应的角度,实现位移,伺服电机本身具备编码器,伺服电机每旋转一个角度,都会发出对应数量的脉冲,和伺服电机接收的脉冲形成闭环,因此,就能够很精确的控制电机的转动,实现精确的定位。伺服电机的位置控制模式就是伺服控制器接收位置命令然后向伺服电机发送相应的脉冲量来控制伺服的定位运动。伺服驱动器接收位置命令的方式有两种,一种是通过端子接线,直接接收外部控制器发出的脉冲量信号,另一种是通过通讯方式接收控制器发出的目标位置点再由驱动器向伺服电机发出脉冲控制伺服。此外,伺服电机的速度控制模式与扭矩控制模式的控制方式相似,是通过输入模拟量或伺服控制器内部寄存器内的数值来控制伺服的输出速度或扭矩,实现伺服的运动控制。
1.2 CANopen总线
CAN(Controller Area Network)是德国Bosch公司在1983年开发的一种串行数据通信协议,通讯速率可达1Mb/s,具有高抗电磁干扰性,而且能够检测出产生的任何错误,保证数据通讯的可靠性。CANopen是以CAN为基础的上层协议,是为了使设备实现运动控制的一种控制网络功能。CANopen作为一种技术先进、可靠性高、实时性强,功能完善、成本合理、完全开放的现场总线,目前在众多行业得到了广泛应用。
2 基于CANopen总线方式的伺服运动控制系统构建
2.1 控制系统设备选择
现以某公司的IC卡自动封装机的定位控制系统为例进行具体说明。IC卡自动封装机的定位系统执行机构主要包括:
(1)1个传送卡片的伺服电机,负责进行卡片的定位传送;
(2)2个芯片搬运伺服电机,每个电机控制一个机械手分别从两路IC卡芯片传输线上吸取芯片,然后放到卡片的指定位置进行封装。
设备基于成本及性能考虑,芯片传送定位执行机构选用步进电机进行控制,不在CANopen的通讯范围之内,故此处不进行介绍。系统控制部分选择用台达系列产品进行设计,以PLC为控制单元,通过CANopen通讯方式与伺服电机进行运动控制系统构建:
• 设备控制部分选用台达DVP28SV11T型PLC;
• CANopen主站选择台达主站模块COPML-SL;
• 伺服选用3个支持CANopen通讯的台达ASDA-A2伺服。
2.2 系统构建
运动控制系统框图如图1所示。
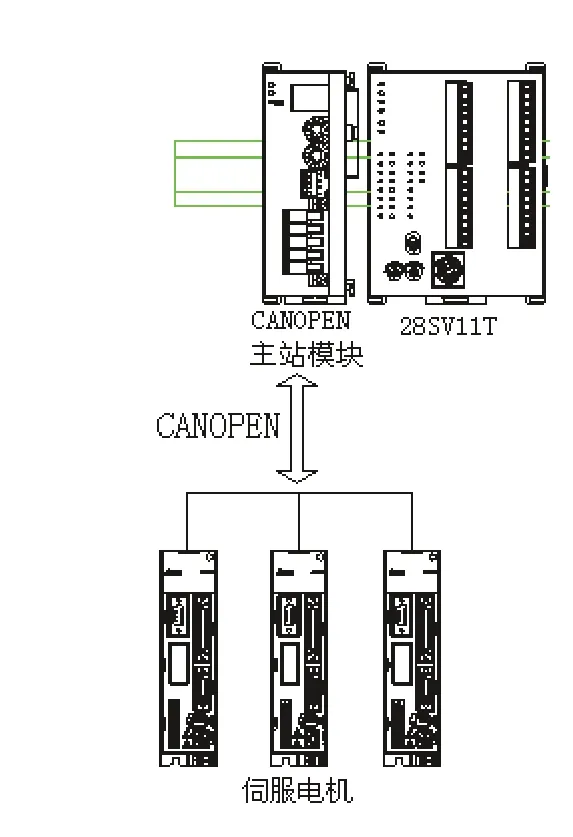
图1 控制系统框图
CANopen主站模块与PLC通过排线相连,3个伺服电机通过通讯线与CANopen主站模块相连。
2.3 CANopen通讯设置
2.3.1 CANopen主站模块设置
(1)要实现CANopen通讯,首先要对CANopen主站模块进行设置。利用Delta CANopen Builder 软件首先完成主站模块与从站伺服的网络架构设置(如图2所示),然后将主站、从站地址与执行相应功能的伺服相对应:001为CANopen通讯主站地址,根据工作需要,从站002伺服设定为相对位置运动方式,从站003、004伺服设定为混合位置运动方式,即相对位置运动与绝对位置运动相互切换的位置运动方式。

图2 CANopen通讯网络图
(2)确定从站控制方式后即可根据各从站伺服的工作方式设定CANopen通讯中从站通讯节点所要建立连接的通讯参数(如图3所示)。以003伺服节点为例,在PDO映射中选择加入基本通讯参数,包括:6060伺服工作模式控制字,6040伺服运行状态控制字,6098原点设定方式,6081伺服速度控制字,607a伺服运行目标位置控制字,以及需要回读的6041伺服工作状态字等。其它伺服从站的PDO映射设置与此类似。

图3 从站通讯节点配置
(3)各从站节点设置完成后,在主站对节点列表进行配置。将各个从站节点添加到节点列表中,同时得到设备输入、输出列表(如图4所示),例如对于003号节点:D6282(16位)为控制字地址,d6283(16位)低八位为控制模式地址,高八位为原点回归方式,d6284(32位)为伺服运行目标位置地址,d6286(32位)为伺服运行速度地址,d6032(16位)为回读伺服运动状态地址。这些地址即为后续PLC编程中PLC内部对应的地址。

图4 通讯节点列表配置
2.3.2 伺服驱动器设置
依据伺服驱动器关于伺服工作于CANopen方式时的规定,首先设定参数表中P1-01为0B,即选择驱动器工作于CANopen通讯模式;然后设定参数表中P3-00为01,即选择伺服的工作模式为位置方式;最后设定参数P3-01为0403,即选择伺服的通讯速率为1Mb/s。
2.4 控制程序编写
依据对CANopen主站设置时得到的设备输入输出节点列表,进行PLC的程序编写。程序初始化阶段,需对伺服的一些必要控制参数进行设定,如003号节点初始化初期设定:工作模式设定D6282=H1、工作速度设定D6286=K10000、目标位置D6284=K10000、伺服工作状态控制字D6282=H8,稍后将控制字D6282=H18,开始启动伺服寻找工作原点,当伺服工作原点指示信号到达时将工作状态控制字D6282=H108,停止伺服运动,此时设定D6283=H2306,伺服将以当前位置作为运动的原点,延时后将此设置还原D6283=H1,这样就完成了003节点伺服工作原点的设置,伺服处于待工作状态。其余两个伺服以相似方式完成各自的工作原点的寻找。设备启动后,再依据工作需要对伺服工作速度、目标位置、工作状态进行控制如图5所示。

图5 伺服控制程序部分
PLC编程时有两点需特别注意:
(1)当整个设备同时通电时,由于PLC的初始化时间远远快过伺服的初始化时间,所以整个设备上电后需要在经过一定时间的延时后,PLC才能运行设备简单初始化程序,启动伺服电机进行工作原点的定位工作,否则会出现伺服电机无响应的情况;
(2)伺服工作在CANopen通讯方式做相对位置方式控制时,如果一条运动指令在执行过程中由于一些特殊情况,导致出现停止信号,则伺服在没有运行到目标位置时因接收到PLC通过程序发出的停止信号而停止运动,此时程序中如不进行必要的处理,则在下一次的伺服启动信号到来时,伺服并不是以所停留的点作为此次相对运动的起点,而是会先完成上一次未执行完的部分运动然后才执行本次运动,这就在本次定位过程中带来位置偏差,为了避免这种情况的出现,当出现由PLC程序发出停止信号终止伺服运动时,可在PLC的停止指令后面编写一条指令来对伺服的工作模式进行修改,稍后再改回原来的模式,经过模式修改操作后,伺服在执行新的运行指令时就不会再执行上一次未执行完毕的部分运动了。
3 基于CANopen通讯方式的伺服运动控制系统调试
3.1 硬件线路搭建
依据设计规划完成各元件的接线工作。用专用通信线连接CANopen通信系统中的各个站点,注意在总线的终端必须加120欧姆终端电阻,否则通信无法连接。
3.2 CANopen通信测试
打开Delta CANopen Builder 软件进行连接,首先对通信口进行通信参数设置:在接口选项中选择via PLC port,即通过PLC进行连接。然后选择所用的COM口及与伺服相应的通讯速率,设置完成后点击连接,软件自动进行网络节点扫描,检测各节点是否正常通信。在通信扫描确定通信正常后,就可以将对主站及各从站模块的设置下载到相应站点了。
3.3 PLC程序调试
通讯测试无误后,依据设备工作的具体工艺要求对所编写的PLC程序进行调试,同时根据PLC回读的伺服电机工作状态字监视电机运行情况,完成对伺服电机的运动控制。
4 结语
本文通过具体案例,介绍了基于CANopen通信协议的多电机控制系统的构建。伺服采用CANopen总线方式做位置控制,相对于直接通过接线发送脉冲的控制方式,接线简单,故障点少,控制设备也不必需要高速脉冲发生功能,同时,采用CANopen总线方式通信抗干扰能力强,实时性、稳定性能好,值得在工业自动化伺服控制中采用。
[1] 李 澄, 赵 辉. CANopen协议及其在电动机控制系统中的应用[J]. 微电机, 2009, 42 (4) : 24-26.
[2] 厉 虹, 杨黎明, 艾 红. 伺服技术[M]. 北京: 国防工业出版社, 2008.
