西门子变频器的应用第2讲 MM440变频器在电梯控制中的应用
2014-07-11浙江工商职业技术学院李方园
浙江工商职业技术学院 李方园
The Application of MM440 AC Inverter in the Elevator Control

1 电梯的驱动方式
电梯停层时梯速为零,正常运行时以额定速度作匀速直线运动。在零速与额定速度之间则作加速或减速过渡,对这一段时间里电机转速的控制叫作调速。在轿厢作加速或减速运动时,乘客会出现超重与失重。普通人对超重和失重的承受能力是很有限的,我国国标GB10058规定了a值不得大于1.5m/s2。另外,如果加速度总在疲动,乘客就会有颠簸的感觉,甚至出现眩晕。这就要求加速度变化率尽可能减小。
自电梯驱动中应用调频调压调速技术后,其调速性能已完全可与原直流电机驱动相媲美。除了具有良好的舒适感之外,平层准确度也大为提高,而且具有明显的节能效果。
2 制动电阻的选型
电梯是一种垂直运输工具,它在运行中不但具有动能,而且具有势能。它经常处在正反转、反复起制动过程中。一般情况下,电梯控制采用的是能耗制动,即采用制动电阻加制动单元的方式。
在电梯应用中,制动电阻阻值绝对不可小于表1中对应值,可以稍大。制动电阻连续功率最好按表中峰值功率选,至少要保证在一次全程检修运行中满功率制动而不过热,因为当轻载上升或重载下降时,电机长时间处于制动状态。例如5.5kW变频器,制动电阻阻值为56Ω,功率至少为3900W,同时设置:P1237=5, P1240=0。制动电阻连接在B+、B-端。

表1 制动电阻值
3 脉冲编码器
脉冲编码器对于传动装置的驱动性能、稳定运行具有十分关键的意义,现场调试人员务必认真安装、调校。脉冲编码器与脉冲编码器模板的连接线必须采用屏蔽线,最好采用双绞屏蔽线甚至双屏蔽双绞线,在编码器一侧预留屏蔽接地点,以便在特殊情况下采用双端屏蔽。原则上该连接线应使用无断头屏蔽线,如无法避免断头,必须对断头连接处作屏蔽处理。
(1)脉冲编码器模板
脉冲编码器模板将脉冲编码器的脉冲信号转换成变频器可识别的转速信号,脉冲编码器与脉冲编码器模板的连接线必须采用屏蔽线,在模板一侧必须接地,暴露于屏蔽层外的部分尽量短,编码器模板的外观如图1所示。
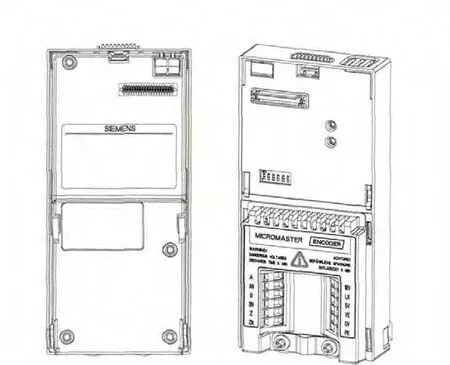
图1 脉冲编码器外观
需要说明的是:
• 编码器模板可以用于高压晶体管逻辑(HTL)和晶体管-晶体管逻辑(TTL)数字编码器.
• 编码器模板的电源是通过变频器面板上的一个40-线插接头,直接由MICROMASTER 440变频器供电。
• 在下列情况下,为了编码器模板的正常工作,必须提供一个外部电源 (接线方法如图2所示) :编码器消耗的电流为140mA或更大时,电源电压为直流18~24V;编码器消耗的电流为 330mA 或更大时,电源电压为直流5V;所用的电缆长度大于50米时,供电电源的电压必须与编码器模板的要求相匹配,并且不超过24V DC。
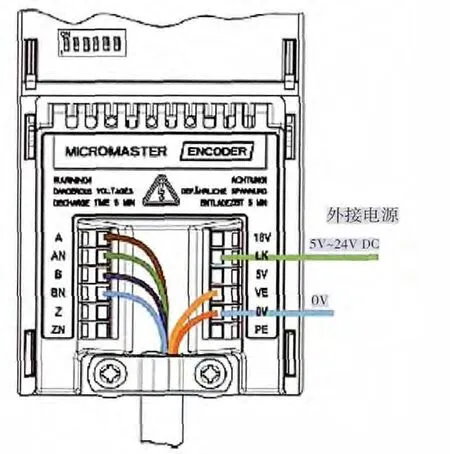
图2 具有外接电源的编码器
(2)屏蔽及端子、DIP 开关
为了保证编码器能够正确完成其功能,必须遵照下面列出的指导原则:编码器模板与编码器之间的连线只能采用具有双绞线的屏蔽电缆;电缆的屏蔽层必须与编码器模板上的屏蔽线接线端子相连接;如果编码器电缆具有“屏蔽/地/接地”接线端,这一接线端应该与编码器模板上的PE (保护接地) 端子相连接;信号电缆的安装位置一定不要紧靠动力电缆。
编码器模板上的DIP 开关是供用户正确地选择与编码器模板连接的编码器的设定值(单端输入或差动输入),具体见参考文献[2]。
4 基本调试步骤
(1)快速调试(如表2所示)
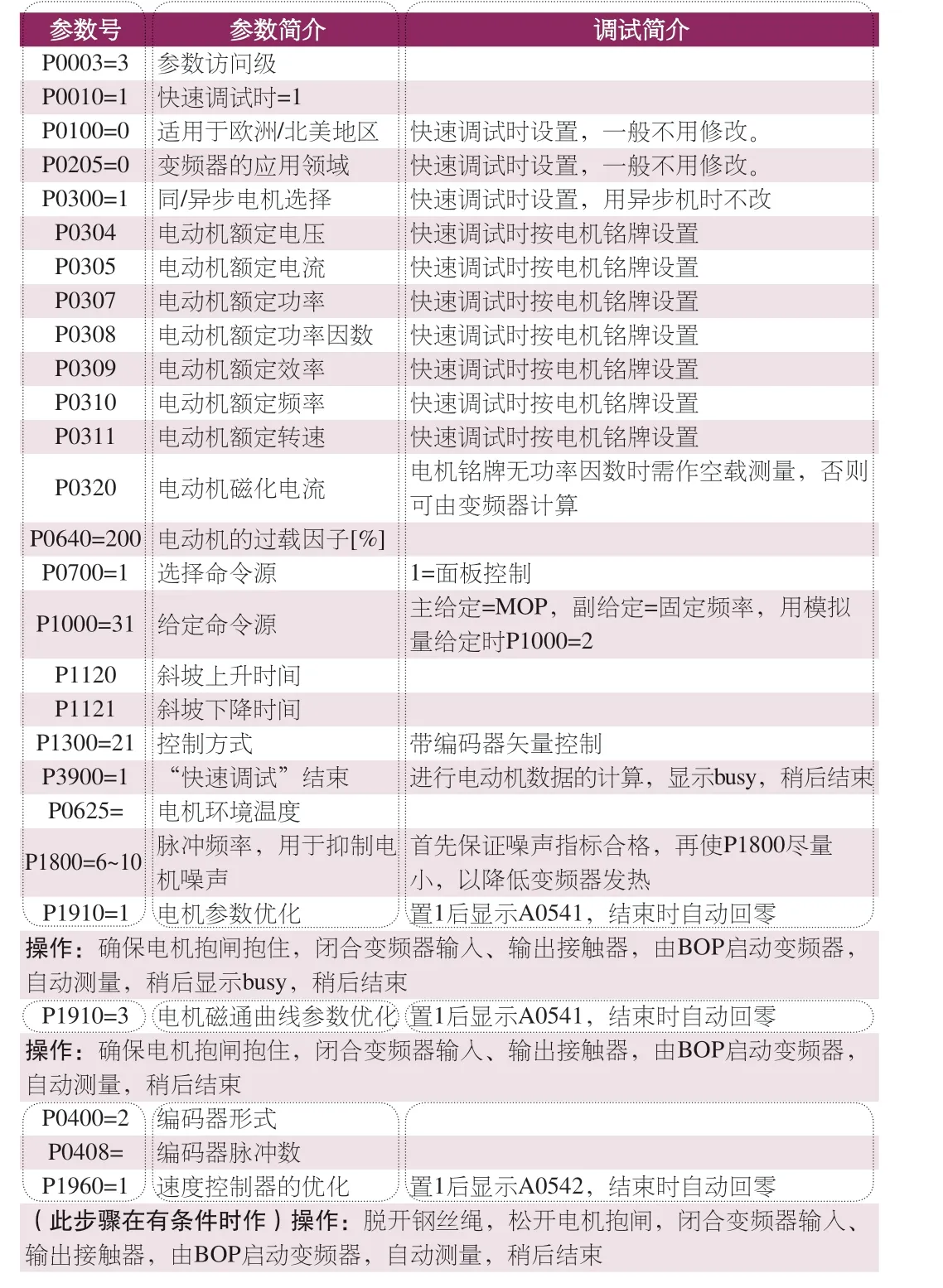
表2 快速调试参数
(2)基本参数设置(如表3所示)

表3 基本参数设置
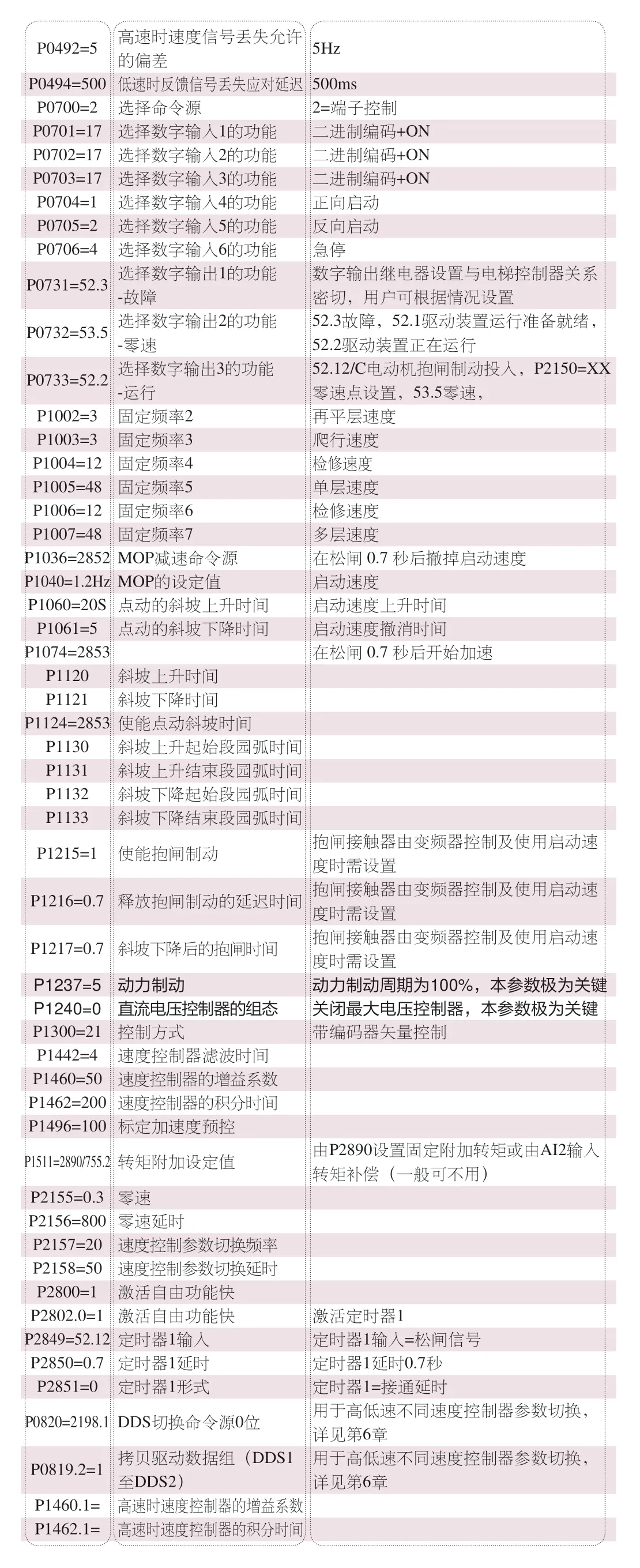
P0492=5 高速时速度信号丢失允许的偏差 5Hz P0494=500 低速时反馈信号丢失应对延迟500ms P0700=2 选择命令源 2=端子控制P0701=17 选择数字输入1的功能 二进制编码+ON P0702=17 选择数字输入2的功能 二进制编码+ON P0703=17 选择数字输入3的功能 二进制编码+ON P0704=1 选择数字输入4的功能 正向启动P0705=2 选择数字输入5的功能 反向启动P0706=4 选择数字输入6的功能 急停P0731=52.3 选择数字输出1的功能-故障数字输出继电器设置与电梯控制器关系密切,用户可根据情况设置P0732=53.5 选择数字输出2的功能-零速52.3故障,52.1驱动装置运行准备就绪,52.2驱动装置正在运行P0733=52.2 选择数字输出3的功能-运行52.12/C电动机抱闸制动投入,P2150=XX 零速点设置,53.5零速,P1002=3 固定频率2 再平层速度P1003=3 固定频率3 爬行速度P1004=12 固定频率4 检修速度P1005=48 固定频率5 单层速度P1006=12 固定频率6 检修速度P1007=48 固定频率7 多层速度P1036=2852 MOP减速命令源 在松闸 0.7 秒后撤掉启动速度P1040=1.2Hz MOP的设定值 启动速度P1060=20S 点动的斜坡上升时间 启动速度上升时间P1061=5 点动的斜坡下降时间 启动速度撤消时间P1074=2853 在松闸 0.7 秒后开始加速P1120 斜坡上升时间P1121 斜坡下降时间P1124=2853 使能点动斜坡时间P1130 斜坡上升起始段园弧时间P1131 斜坡上升结束段园弧时间P1132 斜坡下降起始段园弧时间P1133 斜坡下降结束段园弧时间P1215=1 使能抱闸制动 抱闸接触器由变频器控制及使用启动速度时需设置P1216=0.7 释放抱闸制动的延迟时间 抱闸接触器由变频器控制及使用启动速度时需设置P1217=0.7 斜坡下降后的抱闸时间 抱闸接触器由变频器控制及使用启动速度时需设置P1237=5 动力制动 动力制动周期为100%,本参数极为关键P1240=0 直流电压控制器的组态 关闭最大电压控制器,本参数极为关键P1300=21 控制方式 带编码器矢量控制P1442=4 速度控制器滤波时间P1460=50 速度控制器的增益系数P1462=200 速度控制器的积分时间P1496=100 标定加速度预控P1511=2890/755.2 转矩附加设定值 由P2890设置固定附加转矩或由AI2输入转矩补偿(一般可不用)P2155=0.3 零速P2156=800 零速延时 P2157=20 速度控制参数切换频率 P2158=50 速度控制参数切换延时 P2800=1 激活自由功能快 P2802.0=1 激活自由功能快 激活定时器1 P2849=52.12 定时器1输入 定时器1输入=松闸信号P2850=0.7 定时器1延时 定时器1延时0.7秒P2851=0 定时器1形式 定时器1=接通延时P0820=2198.1 DDS切换命令源0位 用于高低速不同速度控制器参数切换,详见第6章P0819.2=1 拷贝驱动数据组(DDS1至DDS2)用于高低速不同速度控制器参数切换,详见第6章P1460.1= 高速时速度控制器的增益系数P1462.1= 高速时速度控制器的积分时间
5 速度控制器的调整
速度控制器的相关参数如下:
• P1442——速度实际值的滤波时间;
• P1460——速度控制器的增益系数;
• P1462——速度控制器的积分时间。
其调整原则如图3所示。
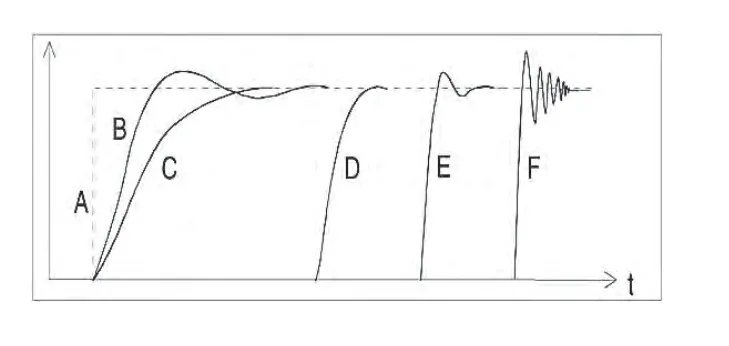
图3 调整原则
图3 为A速度给定,其余为反馈曲线。
A:速度给定信号;
B:P1460和P1462都偏小;
C:P1460偏小,低速控制效果差,高速时振动小;
D:最优;
E:轻微超调,P1460偏大,P1462偏小,低速时控制效果好,高速时可能会振动大,在需要较高动态响应时采用;
F:严重超调,P1460太高,P1462太小。
在调整过程中需要说明的是:减小P1442有助于抑制超调。但太小时反应过于灵敏,系统容易震荡。P1442大时,可减轻由负载波动引起的频繁调整,但会引起超调,尤其是停车时容易过冲。调试时该参数一般先不动,可作为辅助手段与P1460/1462配合调整。
6 结语
变频器应用在电梯中的案例越来越多,本讲主要针对西门子MM440在电梯控制中最常见的制动电阻配置、编码器选用与安装、参数设置提出了一个综合的思路,希望能在实践中起到一个参考作用。
[1] 李方园. 图解变频器维修[M]. 北京: 机械工业出版社, 2014.
[2] 李方园. 零起点学西门子变频器应用[M]. 北京: 机械工业出版社, 2012.