水下战场UUV侦察与监视研究*
2014-07-11李敬辉吉顺东
杨 波 李敬辉 吉顺东
(1.海军工程大学电子工程学院 武汉 430033)(2.92858部队63分队 宁波 315812)
1 引言
水下战场由于自身的复杂性,与陆上战场相比具有以下特点:水下作战平台难以高效通信;能源极难保障;水下节点易受海水侵蚀损坏。因此,世界各国海军一直希望建立持久有效的水下战场监视[1~2]。近年来,无人水下航行器(Unmanned Underwater Vehicle,UUV)技术发展迅速,世界各国正在开发和已经开发出的UUV多达上百型。UUV作为一种新概念武器正呈现出强劲的发展势头,由于具有作战用途广、智能化程度高、隐身性能好、机动能力强、效费比高等特点,因此UUV正在成为新一类的水下作战平台。2005年美国海军发布的《无人水下航行器总体规划》中按舰队和国家需求,将UUV执行情报、监视与侦察作为最优先的任务[3]。美军认为,UUV未来将补充和扩展现有的情报、监视与侦察能力,并将扩大到极浅水域和常规平台难以抵达的地区;UUV通过自身携带的传感器,可以完成收集重要的声场、光电和电磁等数据任务。美军试图利用UUV并结合先进的水下信息网络达到水下战场“单向”透明的目的。而我国发展基础比较薄弱,主要依靠岸基和天基力量,难以完成水下战场的监视任务[4]。
2 UUV常见通信侦察传感器类型
UUV携带的通信侦察传感器类型主要有侦察设备、探测设备、测量设备和通信设备[5~6]等。按使用的工作状态,可将这些传感器分为水面通信侦察设备和水下通信侦察设备,如表1所示。受人工智能技术水平、信息存储和信息处理技术的限制,UUV难以实时处理大量信息,部分功能需要离线后处理才能实现。

表1 通信侦察设备类型
1)侦察设备
水面侦察设备主要包括光电侦察设备和电子(雷达、通信等)信号侦察设备等,用于对水面以上目标和电子信号实施侦察,获取信号、电子、测量和图像情报。光电侦察设备通信包括红外热像传感器和昼光电视传感器等;电子信号侦察设备包括雷达信号侦察设备和通信信号侦察设备等。侦察设备传感器部分安装在UUV的桅杆上,有固定式桅杆和升降式桅杆两种。升降式桅杆在使用时,需UUV浮到水面或近水面升起桅杆,桅杆上的传感器在UUV控制下,观察或侦察水面以上目标或电子信号。
水下侦察设备主要包括成像声纳、水下电视、海洋调查用高频成像声纳等,主要用于对敌近岸海域和敏感海域的水下目标探测、海底地形地貌测量和绘制等。
2)探测设备
水面探测设备主要包括雷达和光学探测设备,用于探测水面和近岸目标[7]。由于雷达功耗大、使用暴露,UUV上通常不会配置雷达;光学探测设备与光学成像侦察设备为共用设备。
水下探测设备主要包括成像声纳、被动探测声纳和水下电视等,用于对水下目标的探测、分类、识别和定位。成像声纳是探测近距离目标的高频声纳,利用主动声纳工作原理探测目标,探测距离为一百至几百米级。按照其在UUV上的布置位置,分为前视声纳和侧扫声纳;按照工作原理分为单波束声纳、多波束声纳和合成孔径声纳等。前视声纳既可用于探测目标,也可用于导航避障。侧扫声纳主要用于探测水中目标,如用于水雷探测和定位、搜救和打捞、海底管线和电缆勘测、水下结构物勘测等,可为使用者提供真实的图像。被动探测声纳为探测远距离目标的低频声纳,利用被动声纳工作原理探测舰艇等机动目标,探测距离为几千米至十几千米,甚至更远。按照其在UUV上的位置,分为舷侧阵声纳和拖曳阵声纳。水下电视是探测近距离目标的高分辨光学设备,探测距离为几米至几十米,用于搜救和打捞、探雷、海底管线和电缆勘测等。其摄像机和水下灯可安装在UUV前部或底部等位置,以便获取目标图像。
3)测量设备
海洋调查用测量设备包括海底地形地貌测量设备、气象水文和海洋水声监视设备等。
温盐深传感器、海流剖面仪和水听器主要用于海洋气象水文和海洋水声测量。海底地形地貌测量设备包括多波束测深声纳、浅层剖面仪和侧扫声纳等设备。主要用于海底地形地貌测量和绘制等,还可用于危险水域的地质、地球物理的勘测,搜救和打捞,掩埋管线和电缆的定位等。多波束测深声纳的测深数据可用于水下自主地形匹配导航。
4)通信设备

图1 法国“阿利斯特”UUV(上)及其通信侦察传感器(下)
UUV的通信设备包括水声通信、无线电通信、卫星通信和光纤有线通信设备等,主要用于UUV与UUV、UUV与其它平台的通信,以实现信息的双向传输。水下使用水声通信,通信距离近、信息量小;水面使用无线电通信和卫星通信,通信距离远、信息量大;水面和水下均可使用光纤通信,通信距离远、信息量大,传输数据可靠。图1是法国“阿利斯特”UUV携带的通信侦察传感器[8]。
3 UUV可提供的情报类型
对利用UUV侦察与监视设备收集的有用信息,进行处理、综合、分析、评价和解释后可以得到的情报类型有图像情报(IMINT)、信号情报(SIGINT)、测量和特征情报(MASINT)等[9],它们分别包括的具体情报如图2所示。
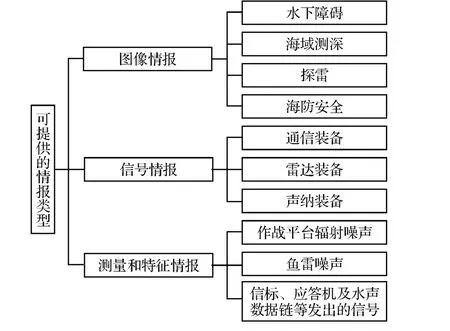
图2 UUV可提供的情报类型
图像情报是指利用UUV的水下电视、声纳等获取自目标的图像,并对这些图像进行解读、分类和评估所得到的情报信息。配备侧扫声纳、多波束回声测深仪、视频摄像机以及辅助灯光的UUV可以执行敏感海域测深、探雷和海防安全等任务。利用最新的合成孔径声纳技术,通过高质量的图像可以分辨几平方厘米的物体。水下战场的图像情报主要用来完成对水雷、水下障碍等的识别和标绘,为战场准备和战后评估提供依据。
信号情报是指UUV利用通信侦听、雷达信号截获、声纳探测等获取的信号,经过操作人员的分析综合后取得的通信、雷达和声纳装备等技术信息和情报。美军设想,利用装备了可伸缩天线的UUV进入接近敌方的通信塔的敏感海域进行通信侦听,以达到获得通信情报的目的。
测量和特征情报是指UUV对来源于特定传感器的数据进行测量,操作人员事后进行定性和定量分析获得的技术信息和情报。UUV利用自身的探测声纳可以实现对舰船、潜艇等作战平台,以及鱼雷发射、航行时的辐射噪声的测量存储,也可以对水下信标、应答机以及水声数据链等发出的信号进行收集,这是声学情报。UUV利用温度、盐度、深度和密度传感器及流速计,完成对航行水域的海洋环境情报的收集。
4 UUV情报、监视与侦察体系结构
一般情况下,UUV侦察与监视到情报保障的工作过程是:由ISR UUV完成对水下战场的监视与侦察任务,利用无线(射频或水声)网络或光纤链路将收集到的信息数据向岸基、天基、水下和水面等指控中心分发,经过操作人员的分析、处理、研究和管理,并与情报资源数据库比对后生成战场情报,以供决策者使用;最后,利用情报分发系统完成情报服务平台对各作战单元的情报保障任务[9]。UUV情报、监视与侦察体系结构如图3所示。单个UUV的侦察或监视过程可以分为以下四个过程:发现(感知目标,并对其信息进行采集)、区分(由于目前的UUV智能程度有限,仅能通过在本身计算机中存储的目标信息进行对比)、识别(UUV通过区分之后,可以对一部分目标如海底管道、水下障碍物进行识别)、定位(在一定的精度下,给出目标的位置)。UUV能够通过自身的传感器,如探雷声纳、电视摄像机,并结合导航装置和深度传感器,利用计算机辅助软件进行数据融合后完成对锚雷的识别和标绘工作。当这些经过简单处理的信息传给指控中心后,会大大减轻操作员的工作量。
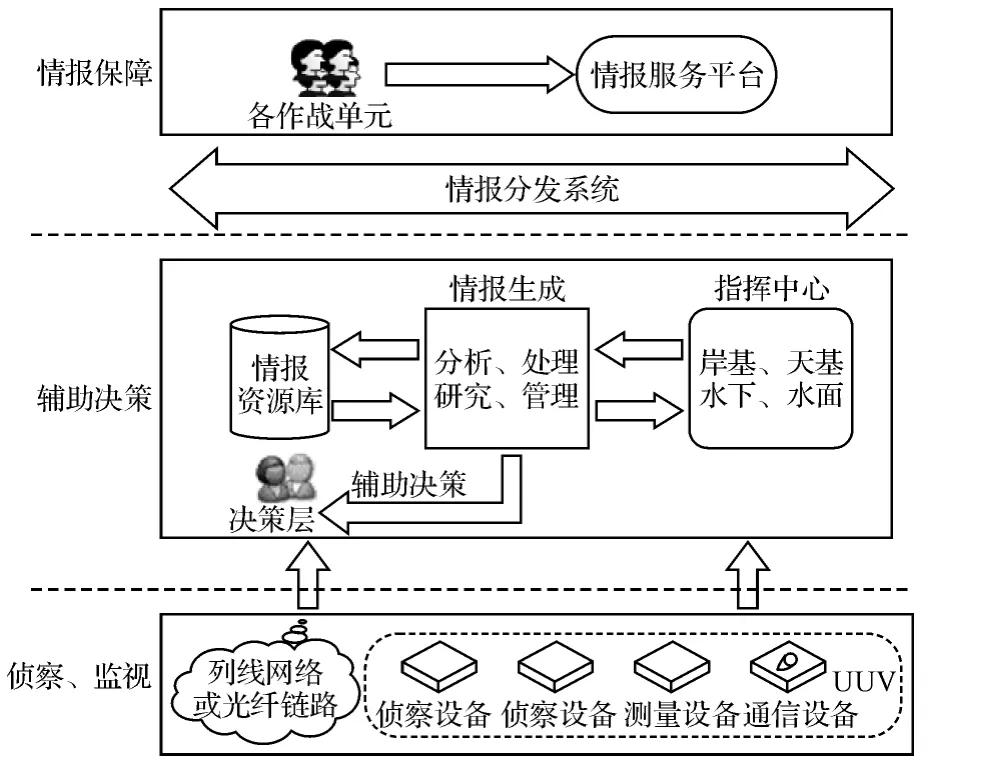
图3 UUV情报、监视与侦察体系结构
5 结语
水下战场是进行水雷战与反水雷战、潜艇战和反潜战的舞台,也是军事强国力图保持军事优势的关键之处。随着我国经济的稳定快速发展,未来发生海上冲突的可能性正在逐步增大,应充分利用UUV的特点,实现对水下战场的侦察与监视,为未来海战提供可靠高效的情报保障。
[1]胡悦.水下通信系统综述[J].探测与定位,2011,12(4):61-68.
[2]李耐和.外军构建水下作战网络[J].现代军事,2007(12):46-50.
[3]陈强,张林根.美国军用UUV现状及发展趋势分析[J].舰船科学技术,2010(7):129-134.
[4]赵良明,刘卫东.水下网络中心战概念与框架研究[J].声学技术,2009(12):136-139.
[5]陈强,董鹏.国外UUV载荷配置分析[J].论证与研究,2010(6):41-40.
[6]陈尧,林平.国外反水雷UUV声纳配置及发展趋势[J].海军学术研究,2011(9):86-88.
[7]喻剑.多国海军已将轻型UUV应用于未知水域探测[J].水雷战与舰船防护,2011(8):55-59.
[8]傅金祝.法国“阿利斯特”自主水下航行器[J].舰船知识,2010(10):66-67.
[9]雷厉.侦察与监视[M].北京:国防工业出版社,2012,2:1-46.