夜间车流量检测算法
2014-07-09田晓霞王学军
田晓霞,王学军
(石家庄铁道大学 信息科学与技术学院,河北 石家庄 050043)
社会经济的快速发展使得私有汽车的数量急剧增加,智能交通系统(ITS)作为一种实时、高效的交通管理系统以其能够有效地解决交通拥堵问题得到世界的认可。车流量检测方法的研究在智能交通系统的研究中占有很重要的地位,而车辆检测和车辆跟踪是智能交通系统中获取车流量信息的第一步。
1 夜间车辆检测
作为全天候交通视频监控的一部分,夜晚情况下由于照明条件差,车身可见度低并且车灯光晕会引起背景的混乱从而极大地加深了检测的难度,因此夜间车辆检测因其复杂的光照条件一直是个棘手的难题。
为了解决夜间车辆检测这一难题,相关学者主要从以下两个方面着手进行了研究,一是在硬件上,采用高性能的摄像机,这种方法在检测道路行人时有效但是在检测夜间车辆时会受到车灯光晕及车灯投射光线的影响。目前常用的方法仍然是通过CCD摄像机拍摄夜间视频,通过检测车辆中的车头灯对夜间车辆进行检测[1]。二是针对夜间车辆检测算法进行了研究,一些学者考虑到在夜间受车灯光晕及其路面反射光线影响严重,因此试图采用帧差法[2]来消除车灯光晕和路面反射光线,而帧差法本身就有不能完整的检测车辆前景的缺陷。一些学者根据夜间车灯所具有的明亮、稳定且不受路灯投射光线和天气情况影响这几个特征做了大量的研究工作。在夜间,车灯无外乎车前灯[3]和车尾灯[4,5]这两种。田齐在文章中提取出的明亮的车前灯是采用灰度值形态学变换的方法,然后对同一车灯进行匹配进而对车辆进行检测,但是这种方法也不能准确地提取出车前灯因为此方法存在着不能很好的解决车灯投射光线及路面反射光线的问题。还有一些学者利用车灯颜色信息来提取车灯,考虑到车尾灯呈偏红色进而利用车尾灯中心区域像素的偏红程度这个特性来提取车尾灯,然后再对车灯进行配对和跟踪。该算法虽然计算量小但并不是每辆车的车尾灯都呈现偏红色,因而不能只利用夜间车尾灯呈偏红色这一特征来实现车灯的提取。
夜间交通视频图像中,要提取的完整的车辆目标由于车辆与背景的对比度过低变得较为困难,这时夜间道路识别车辆具有显著且稳定的特征就非车灯莫属。夜间道路上基本每辆车都有两个明亮的车灯,但是存在部分车尾灯因受到其它车辆车前灯照射变得不是十分明显而且颜色特征也不稳定。综上考虑,本文提出了一种提取车前灯的夜间车流量检测算法。图1给出了夜间车流量检测流程图。

图1 夜间车辆检测流程图
2 车灯的提取
2.1 图像灰度化
从交通现场传来的实时视频帧一般是通过彩色摄像机采集的数字彩色图像,彩色图像的每个像素是由红、绿、蓝3种基本色调按不同比例组合而成的。为了减少工作量用以下公式对图像进行灰度化:

其中0.299、0.587、0.114为实验推导出的合理的权值[6]。其彩色图和灰度图分别如图2,3所示:

图2 彩色图像

图3灰度图像
2.2 车灯的分割
本文采用直接对图像二值化的方法来提取车灯,将耀眼的车前灯从背景中分离开来,对图3进行二值化后的图像如4所示。从图4可以看出对视频帧进行二值化后的车灯前景是不规则的,除了车灯外还有大面积的车灯投射光线,而且还存在噪声,这是由于夜间车灯光晕或路面反光引起的。对于既要消除噪声又要保持图像细节的视频帧来说,中值滤波器能够很好的解决。
中值滤波器[7]是一种非线性滤波器,它的主要功能是让某一像素与周围像素值之差较大的像素改变,然后取与周围像素值相近的值从而消除噪声点。对图4进行中值滤波后的图像如图5所示:

图4 二值化
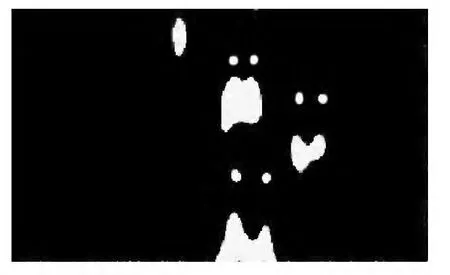
图5 中值滤波
从以上两图可以看出,中值滤波后可以较好地滤除视频帧中的噪声。接下来就需要在图像前景中识别出车灯。
2.3 车灯的识别
通过上一节分析可知,应用图像二值化的方法从夜间交通图像中分割出来的包括车灯和大面积的车灯投射光线。所以,需要从前景中查找出车灯。本文经过分析比较了车灯和车灯投射光线之间的差异[8]:(1)车灯呈椭圆形而投射光线的形状不规则;(2)车灯的面积比投射光线的面积小并且车灯面积在一定范围内。
为了量化这两点差异,简单介绍一下与夜间车辆检测算法相关的形态学特征,包括面积(S)、周长(P)、圆形度(SP)。
(1)面积(S)和周长(P)。
形态学中常用来表示一个物体大小的参数是面积和周长。车灯连通区域的面积是指该车灯连通区域所有像素的总和,周长是指该连通区域边界上的所有像素的总和。对图像中的像素点进行领域判断,将特定区域中有前景点又有背景点的像素点称为边界点[9]。
(2)圆形度(SP)
SP是指物体接近圆的程度[6],即物体越接近圆,圆形度越接近于1.
对本文视频帧中分割出的每个连通区域计算其S、P和SP等参数,然后设置一些阈值,假设某个区域的参数在阈值范围内,那么该区域为车灯,否则认为是非车灯并且将其在前景图像中去除。图6为提取出的车前灯,车灯边缘线在视频帧中用红色标出。从图中可以看出,该算法可以较好的从夜间交通视频帧中将车前灯提取出来。

图6 提取出的车前灯
3 车灯配对
只提取出车前灯并不能实现车流量的统计,因为交通道路中存在着各种类型的车辆,如公交车、摩托车、小轿车,可能还有故障车等,这些车辆的车前灯数不但各不相同而且还会出现某些故障车车前灯坏掉的现象,所以不能简单的利用所有车灯数减半的方法来计算车流量。所以,还需要对车灯进行帧内匹配和帧间跟踪从而得到准确的车流量数据。车灯匹配解决的是车灯属于哪一辆车的问题,而车灯跟踪解决的是车流量统计的问题。
采用以下规则进行帧内车灯配对:
(1)属于一个车灯对的车灯在距离上应在一定的范围之内,即满足下面两式:

其中(xi,yi)是一个车灯的坐标,(xj,yj)是与该车灯配对的另一个车灯坐标。
(2)属于同一个车灯对的车灯运动轨迹相差不多,也就是要配对的两车灯连线的斜率接近于0。中心连线的斜率为:

(3)要配对的两个车灯大小相似。
(4)与一个车灯配对的只能有一个车灯,对于故障车、摩托车或电动车有可能找不到匹配的车灯,那么将该车灯的信息保存在跟踪数组中。
根据以上规则,可确定帧内车灯的配对的算法:
(1)计算当前帧两车灯之间的横坐标之差distanc_X和纵坐标之差distanc_Y。
(2)若两个车灯i和j之间的距离满足公式(2)式和公式(3)式,则他们可能属于同一辆车。
(3)若对该车灯可能属于同一辆车的车灯数为1,则匹配成功。否则根据距离和车灯大小在帧中选取最佳匹配车灯,完成帧内车灯匹配。
(4)对于落单的车灯,进行单独标定,认为这是一辆车。
4 车灯跟踪
前面章节中已较完整的论述了将车灯提取出来的过程,而且实现了帧内车灯的配对,也就是说每一组车灯代表一辆车,接下来要实现帧间车灯的匹配就要对配对好的车灯进行跟踪。由于交通视频帧率快并且相邻两帧时间间隔很短,一定时间内车辆运动的距离较短并且车灯面积变化不大,因此设计了以下三个匹配准则:
(1)计算车灯对的中心坐标(x,y),也就是车灯对连线的中心坐标,假如只有一个车灯,那么该车灯中心即为车灯对的中心。在相邻两帧图像中,车灯对的中心移动距离在一定的范围内。设车灯对的两车灯的坐标分别为(x1,y1)、(x2,y2),那么中心坐标(x,y)为:

(2)计算每个车灯对的平均面积(avgS),假设只有一个车灯,那么该车灯的面积即为平均面积。相邻两帧中车灯对的平均面积相似。
(3)车灯对中的车灯数目保持不变。并用特征向量LPi=(x,y,avgS)表示当前帧中各车灯对的中心坐标和平均面积。
根据以上匹配准则,车灯对帧内跟踪算法如下:
(1)用特征向量LPi= (x,y,avgS)T表示当前帧中的各个车灯对的信息,如果当前帧是第一帧,则将帧中的所有车灯对信息保存在目标链中,分别另每个车灯对的跟踪次数为1.并将下一帧中各个车灯对与目标链中的各个车灯对进行匹配。
(2)如果当前帧不是第一帧则将当前帧中各车灯对信息与目标链中的各个车灯对进行匹配。
(3)若匹配成功,则用当前帧中该车灯对信息更新目标链中该车灯对的信息,并另跟踪次数加1,否则转为(1)。
(4)若连续跟踪次数超过一定的阈值T(本文中设置为6),则认为该车灯对属于同一车辆,车辆计数加1,否则车辆计数不变。
(5)检测目标链帧中的所有车灯对,对于连续数帧都没有跟踪到的车灯对(设置阈值TT,本文中设置为10),认为该车灯离开了场景并删除该车灯对的信息。
(6)保存目标链中各个车灯对的计数结果,即统计车流量。
5 结束语
采用了一种基于车前灯的夜间车流量检测算法,提出了利用图像二值化的方法提取车灯,并根据车灯的形状特征识别车灯,然后设计了车灯帧内配对和帧间匹配准则并给出车灯对跟踪算法的流程。该算法能过较好地进行夜间车辆检测并且有很高的实时性。然而针对复杂环境(如雨天、存在大型车辆、交通拥堵)下的夜间车流量检测并非简单的车灯配对、跟踪就能解决,还需要考虑时域信息的利用,这将是下一步的研究工作。
[1]王圣男,郁梅,蒋刚毅.智能交通系统中基于视频图像处理的车辆检测与跟踪方法综述.计算机应用研究[J].2005,9(7):9-14.
[2]唐佳林,李熙莹,罗东华.一种基于帧差法的夜间车辆检测方法.计算机测量与控制[J].2008,16(12):1811-1813.
[3]田齐.基于汽车前照灯的夜间车辆定位方法研究[J].交通信息与安全.2010,2(28):58-60.
[4]刘勃,周荷琴,魏铭旭.基于颜色和运动信息的夜间车辆检测方法[J].中国图象图形学报.2005,10(2):187-191.
[5]刘尊洋,叶庆,李菲,等.基于亮度与颜色四阈值的尾灯检测算法.计算机工程[J].2010,36(21):201-206.
[6]吴海涛.复杂环境下的夜间车辆检测与交通视频昼夜亮度变化模型研究[D].上海:上海交通大学.2007.
[7]杨高波,杜青松著.图像/视频处理应用及实例[M].北京:电子工业出版社.2010.
[8]吴志伟.基于视频的车流量检测技术研究[D].广州:华南理工大学.2012.
[9]宋国云.数字化铁谱图像自动分割与识别技术研究[D].广州:华南理工大学.2007.
