固体运载火箭捷联惯导快速水平对准研究
2014-07-09任玉川蔡虹曼邵会兵
任玉川,蔡虹曼,邵会兵
(北京控制与电子技术研究所,北京 100038)
0 引言
小卫星市场的蓬勃发展以及军事航天领域对快速进入空间的迫切需求,使得固体运载火箭成为世界各航天大国发展的重点之一[1]。固体运载火箭可以实现军民两用小卫星的快速、低成本发射,也可用于轨道转移飞行器以及超高声速飞行器等有效载荷的发射[2-3]。
固体运载火箭在射前需进行初始对准,一般分为通过光学瞄准进行的方位对准和运载火箭上捷联惯导测量进行的水平对准。传统上,为了保证水平对准精度,需要采用复杂的滤波环节来进行水平对准,对准时间长达数分钟甚至长达数十分钟,不利于固体运载火箭快速发射需求的实现。考虑到固体运载火箭射前的特点,其环境条件为一种存在扰动的准静止条件,因此,提出了一种基于导航方式的快速水平对准方法,在短时间内根据导航速度误差估计出水平对准失准角,并完成对水平对准角的修正,从而快速完成固体运载火箭捷联惯导的快速水平对准工作。
1 基于导航方式的快速水平对准方法
1.1 坐标系定义
1.1.1 天北西坐标系OnXnYnZn(n)
坐标原点 O取在载体质心处,OnZn指向西(与卯酉圈相切),OnYn轴指北 (与子午圈相切),OnXnYnZn成右手直角坐标系。
1.1.2 箭体坐标系O1X1Y1Z1(b)
原点在箭体质心;O1X1沿箭体纵轴,指向箭体前方,O1Y1在箭体纵向平面内,垂直于O1X1轴,指向上为正;O1X1Y1Z1为右手直角坐标系。
1.1.3 捷联惯导本体坐标系ObtXbtYbtZbt(bt)
该坐标系和捷联惯导本体固连,由捷联惯导本体安装基准面确定,在没有陀螺和加速度表在本体上安装误差的情况下,其三个轴与陀螺和加速度表的敏感轴平行。在没有弹性变形和本体在弹上安装误差时,该坐标系与箭体坐标系重合。
1.2 水平对准失准角估计方法原理
运载火箭箭体在射前经过物理调平,一般可保证捷联惯导的两个水平轴与水平面的夹角在2度以内,并且射前的方位对准工作提前完成,当箭上设备加电,完成快速水平对准并建立射前初始基准后即可快速发射。
该方法假设水平对准角度为0,结合方位对准角度,建立天北西坐标系导航所需的粗略初始基准,利用惯组的测量信息进行导航,同时利用导航速度对两个水平对准角的失准角进行估计,在射前对粗略初始基准进行修正,并结合方位对准信息建立火箭射前初始基准。该方法的原理框图如图1所示。
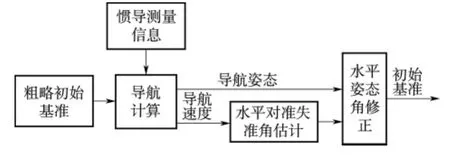
图1 水平对准原理图Fig.1 The scheme of horizontal alignment
设捷联惯导经过方位对准之后,可获得惯组本体坐标系与数学平台坐标系n'之间的方向余弦矩阵Cbnt
'。设n'坐标系偏离n坐标系的失准角为φU,φN,φW,它们都是小角,所以近似有
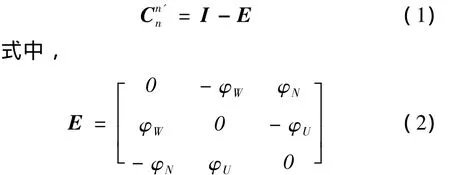
如果能求得 φN,φW,则按照下式修正可获得:

式中,Cn'bt为粗对准得到的结果。因此对准问题转化为如何确定出φN,φW。
捷联式惯导系统的姿态误差角满足如下方程:
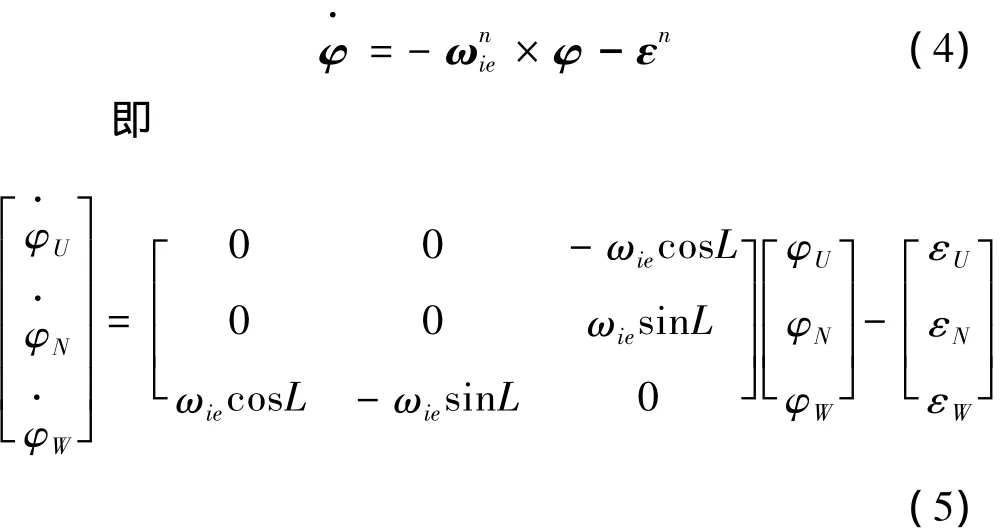
式中,[εEεNεU]T为捷联陀螺的等效随机常值漂移。
上式的解为:
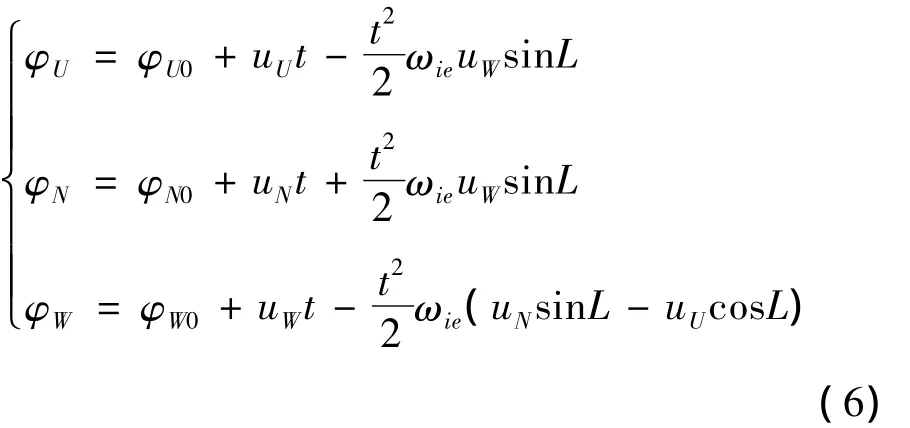
式中,φU0,φN0,φW0,分别为 φU,φN,φW的初值,且
姿态误差角问题转化为确定其初值和等效常值漂移,初始对准问题转化为参数辨识问题。
在晃动基座上,加速度计感测两种成分:重力加速度和晃动干扰加速度,由于加速度表刻度因子以及安装误差已经得到补偿,仅考虑加速度表零偏误差∇x,∇y,∇z则加速度计的输出为:f~b在导航坐标系n'内的分量为:
[∇U∇N∇W]T= Cnb∇b为等效加速度计偏值。
[fdUfdNfdW]T为加速度计输出中的干扰加速度部分。则的水平分量为:

将φW和φN表达式代入上式,并在[0,t]内积分,得速度增量:
短时间内,忽略与时间相关的高阶小量可得:

利用 (14)、(15)两式采用最小二乘方法进行参数辨识便可获得待求的水平对准失准角φN0与φW0,短时间内认为水平对准失准角无变化,即φN≈φN0;φW≈φW0,从而,利用公式 (1)、(2)求得导航坐标系与数学平台系之间的方向余弦矩阵Cn'n,由公式 (3)即可求取捷联惯导本体坐标系与导航坐标系之间的方向余弦矩阵,从而完成快速水平对准工作。
1.3 方法精度分析
从 (12)、 (13)两式可看出:在[0,t]内的速度误差增量中,水平姿态误差初值构成时间的一次方项,包含陀螺等效北向漂移信息的uN及包含方位误差角初值信息的uW构成时间的二次方项,而包含陀螺等效方位漂移信息的uU构成时间的三次方项。
短时间 (如15 s)内,可以认为

并依此关系式来对水平对准失准角φN0进行估计。由于误差项忽略所带来的误差分析如下:
以纬度40度计,考虑加速度表零位误差为10-4g,陀螺常值漂移为0.09(°)/h。则当 t=15s时,由于误差项忽略所引起的水平对准误差为δ=20.667″。而在15 s内由于陀螺零漂所带来姿态导航误差小于1″,可忽略不计。分析表明,该方法可实现15 s内水平对准1'的精度指标需求。
2 仿真分析
设置仿真条件如下:
1)箭体姿态扰动为1Hz、3'的正弦扰动;
2)箭体切向加速度为1Hz、0.7m/s2;
3)初始水平姿态角误差分别为1°、2°;
4)陀螺随机常值零偏为0.09(°)/h,随机游走
5)加速度表随机常值零偏为10-4g,随机游走系数10-5g /。
捷联惯导真实姿态角如图2所示。水平对准失准角估计结果如图3所示,由图可知水平对准失准角的估计结果在15 s内即可完成收敛。修正获取的水平对准角偏差如图4所示,由图可知在1s内水平姿态角即可达到优于1'的精度。在给定的载体动态环境以及主要惯性器件误差条件下,该方法正确有效,可满足指标要求。
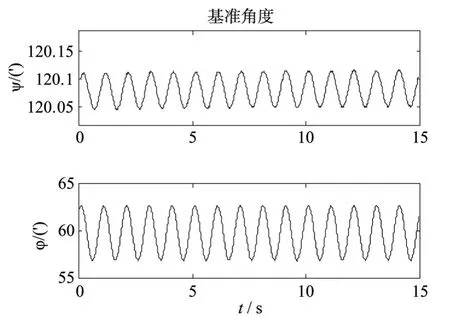
图2 基准角情况Fig.2 The reference angles
3 结论
针对固体运载火箭快速发射的关键技术之一——扰动环境下的快速水平对准技术,给出了一种基于导航方式的快速水平对准方法,在短时间内根据导航速度误差估计出水平对准失准角,并完成对水平对准角的修正,从而快速完成固体运载火箭捷联惯导的快速水平对准工作。在设定的条件下,通过数字仿真分析,在15秒内水平姿态角即可达到优于1'的精度,验证了该方法的有效性,为固体运载火箭水平对准案设计以及工程化应用提供了一个技术途径。
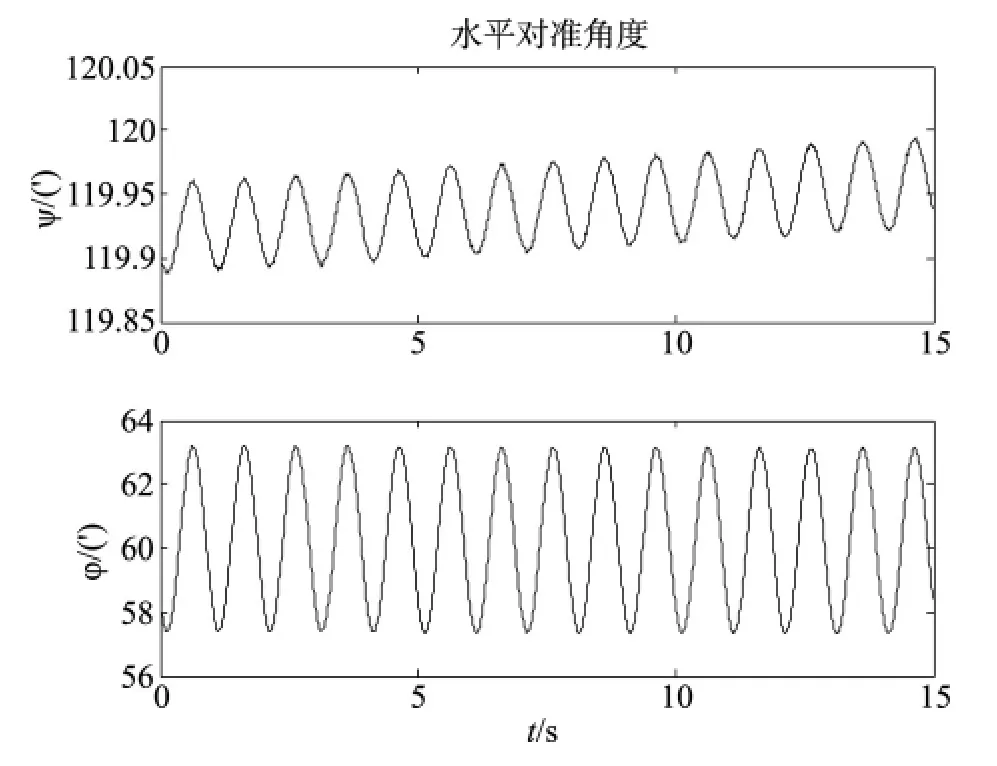
图3 水平对准估计结果Fig.3 The result of horizontal alignment
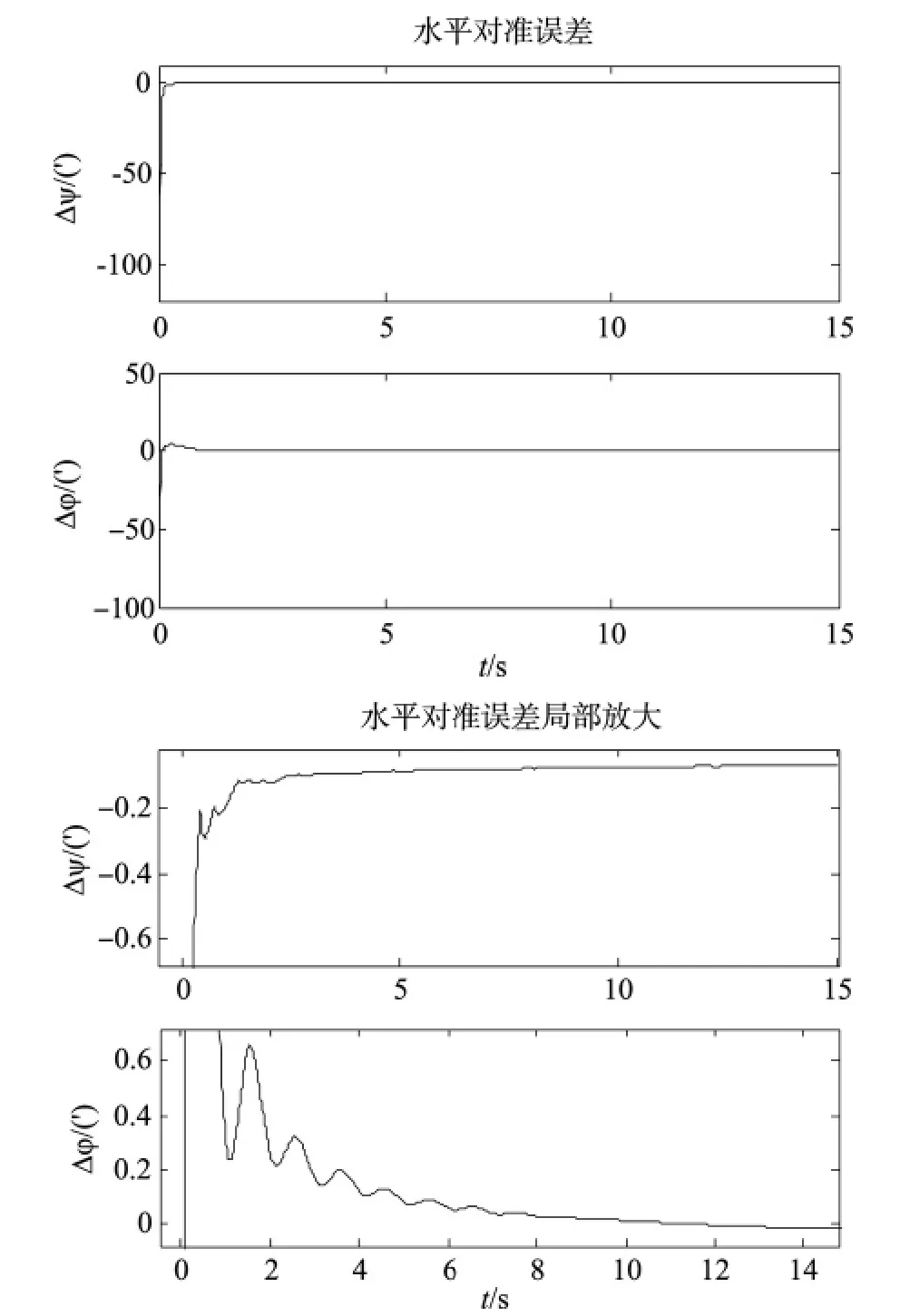
图4 水平对准误差Fig.4 Horizontal alignment precision
[1]Ronald M Sega.Plan for operationally responsive space[C].A Report for Congressional Defense Committees’2007.
[2]潘清,廖育荣,等.快速响应空间概念与研究进展[M].北京:国防工业出版社,2010.[Pan Qing,Liao Yu-rong.The concept and research progress of fast spatial response[M].Beijing:National Defense Industry Press,2010.]
[3]徐鹏.美国快速响应作战发射技术的发展[J].国际太空,2006(10):18-21.[Xu Peng.The rapid response operation emission technology development of USA [J].International Space,2006(10):18 -21.]
