单兵自主导航技术研究
2014-07-09徐海刚吴亮华李海军姜述明
徐海刚,吴亮华,杨 军,李海军,姜述明
(北京自动化控制设备研究所,北京 100074)
XU Hai-gang,WU Liang-hua,YANG Jun,LI Hai-jun,JIANG Shu-ming
(Beijing Automatic Control and Equipment Institute,Beijing 100074,China)
0 引言
在现代战争中,尤其是在空中打击之后的地面进攻、巷战、反恐等作战行动中,单兵导航装备对于辅助士兵任务完成、保障其生命安全具有重要的作用。目前,单兵导航装备的核心是卫星导航系统。卫星导航系统能够为武器装备提供高精度的定位、导航与授时信息,但其信号易被干扰,难以到达室内、丛林及水下等区域,导航卫星存在被攻击的危险。因此,在现代战争中,卫星导航系统既不可或缺,又不能过于依赖。
惯性导航系统具有自主、实时、连续、不受干扰等突出特点,可解决各类武器平台及导弹等大型武器装备对自主导航的需求,但难以满足单兵导航对精度、体积、重量、功耗以及成本的苛刻限制,也难以满足高速旋转导弹、制导炮弹、微型无人装备等比较特殊的需求。
针对卫星导航系统不可用情况下武器装备对定位、导航与授时信息的需求,美国DARPA于2010 年启动了 MicroPNT[1-2]计划,通过研制微型陀螺、微型加速度计、微型原子钟并予以高度集成,来实现小体积、高精度的自主定位、导航与授时系统,其实质是一种基于现代最新科技的微型惯性导航系统,在技术上极具挑战性。单兵导航是MicroPNT计划重点研究的方向之一。需要说明的是,目前解决单兵导航问题的方法还有射频定位技术[3],但其与卫星导航系统同样不具备自主性,作者认为,惯性技术是单兵导航的最终解决方案。本报告依次论述了单兵自主导航的基本方案、关键技术、试验情况及发展前景,希望为我国单兵导航技术乃至MicroPNT技术的发展提供参考。
1 基本方案
本部分介绍单兵自主导航系统的基本原理、系统组成和基本算法。
1.1 基本原理
惯导系统应用于测地车时,常采用间隔一定时间的零速修正来实现高精度定位测量;若采用导航级的惯导系统,在10 min间隔零速修正下定位精度能够达到5 m(CEP)的精度,在5 min间隔零速修正下定位精度能够达到2~3 m(CEP)的精度。采用更高精度的惯导系统或者缩短零速修正间隔时间,都能够有效的提高定位精度。
单兵自主导航技术的实现基于这样一个事实:人在行走过程中,脚部着地瞬间的速度为零;若在脚部适当的位置安装一套惯导系统,则这一瞬间的零速可用来修正惯导的导航误差,也就是可以进行零速修正[4-6]。尽管目前体积和重量能够满足脚部安装的惯导系统 (目前只有微机电惯导系统合适)精度较差,但由于零速修正间隔时间非常短,因此,仍有望实现很高的定位精度。这就是单兵自主导航技术的基本原理。
1.2 系统组成
基于上述原理的单兵自主导航系统至少包括一套可以嵌在鞋中的微型惯导系统和一台便携式显控系统;为便于实际应用,还应有监控指挥系统来实现统一的作战指挥。因此,完整单兵自主导航系统应具有定位、便携显控、监控指挥三大功能,相应的,产品包括微惯性导航系统 (下称“微惯导”)、便携式显控系统 (下称“显控”)和综合监控指挥系统 (下称“监控”)三部分,如图1所示。
微惯导主要由微机电陀螺、微机电加速度计、处理器、接口控制等部分组成,此外,还可以集成磁力计、气压计以及卫星接收机芯片等,以获得更为丰富的导航资源。显控可采用一般的PDA或手机,实时接收和显示微机电惯导系统发送来的定位信息和原始数据,同时将定位信息经由无线网络发送给监控,并接收后者的指令;显控与惯导之间可采用有线方式连接,从而更好的保障惯导的电源;导航解算也可以在显控中完成,因为后者具有更强的运算能力。监控可采用具有无线通讯功能的笔记本,接收并显示各单兵显控发送来的定位信息,并通过无线通讯对各单兵实施指挥。实际应用时,惯导、显控以及监控需要相互配合,共同实现单兵定位功能,如图2所示。

图2 单兵定位系统应用模拟图Fig.2 Simulation of navigation system of individual soldier
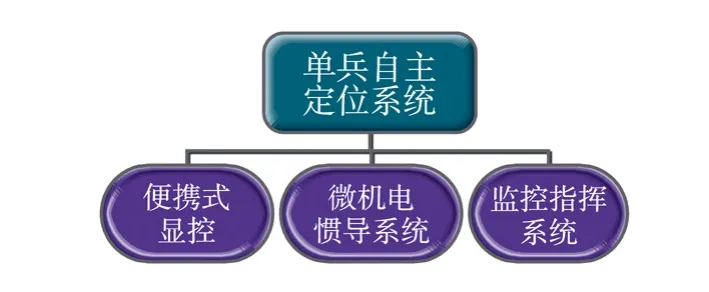
图1 个人导航系统组成结构图Fig.1 Structure of navigation system of individual soldier
1.3 基本算法
单兵自主导航技术的算法主要包括初始对准、导航解算、零速检测、滤波修正四部分。
(1)初始对准技术
初始静止一定时间,由水平方向的两个加速度计输出可完成水平对准,计算公式为
式中:g0为重力加速度;fxs、fzs为x向、z向加速度计输出,s代表系统坐标系;θ、γ为导航系统的俯仰角和滚动角;为俯仰角和滚动角估算值。初始航向角可采用磁力计提供的磁航向角装订,或者直接装订为0,后续的导航都是相对初始位置和初始方位来进行的。
(2)导航解算
导航解算包括姿态更新、速度更新和位置更新三部分算法,与一般的惯性导航解算方法相同;考虑到单兵室内定位系统的导航范围,可采用直角坐标系来进行位置更新,公式为
式中:F(tk)、U(tk)和R(tk)分别表示tk时刻前、上和右的位移,VnF(tk)、VnU(tk)和VnR(tk)表示tk时刻前、上和右的速度,n代表导航坐标系。
(3)零速检测
人在行走过程中,脚部位置的加速度幅值变化情况体现了脚进行抬起→迈步→落地的周期运动,角速度信息也呈现同样明显的特征。图3给出了某次原理试验的加速度幅值变化图。

图3 人体行走过程中加速度幅值变化图Fig.3 The change of acceleration in walking
通过分析一段时间内 (几百毫秒)加速度、加速度幅度变化情况,可以检测出人体的运动状态,基本算法如下:
(4)滤波修正
由静态检测技术检测出静止状态后,最直接的零速修正方法是将解算的速度置零,但该方法对导航精度的提高有限,为此提出零速修正技术,当检测结果为静止状态时,通过“速度”匹配估计出此时的速度误差、位移误差以及水平姿态角误差,并进行闭环修正,从而获得高精度的导航结果。
2 关键因素分析
根据系统组成和工作原理,可能影响单兵自主导航精度的因素主要包括惯性仪表性能和零速修正技术等,下面进行简要分析。
2.1 惯性仪表性能的影响
由1.1的分析可知,惯导仪表的性能是影响单兵自主导航精度的关键因素;通过初步的仿真分析可以看出,在2 m/s的行走速度和最长1秒间隔零速修正的条件下,为实现10 m/h的定位精度,要求惯导系统的陀螺精度优于1(°)/h,加速度计精度优于500ug;为实现10 m/d的定位精度,要求陀螺精度优于0.1(°)/h,加速度计精度优于100ug。
此外,需要引起注意的是,惯导所选惯性仪表的测量范围必须能够覆盖正常的人体运动范围,尤其是在行走过程中,脚部运动的角速度瞬时值比较大。图4为某次单兵导航试验 (慢跑状态)过程中的运动角速度,可见,角速度峰值接近1000(°)/s;通过实验数据发现,陀螺的测量范围需要达到2000(°)/s以上才能基本覆盖人的大部分运动状态。
2.2 零速修正设计
单兵自主导航所能采用的外部辅助手段只有瞬时零速信息,因此,零速修正技术的设计对于定位精度至关重要。影响零速修正性能的主要因素有零速检测和滤波器设计。

图4 慢跑状态下脚部运动的角速度Fig.4 Angular velocity of crus in cantering
(1)零速检测
如图3所示,为准确检测出脚部静止的瞬间,需要根据陀螺和加速度计测量的角速度和加速度来进行判断;由于脚部静止的时间非常短,而零速信息对于导航精度又至关重要,因此,需要非常准确的判断出零速状态;这就需要对不同人、不同运动状态、不同行走环境以及不同安装部位下的运动特点进行大量的试验和分析,找出能适应所有运动状态的判据,建立相应的模型库,确保精确检测出瞬时的零速状态。
(2)滤波器设计
滤波器的设计需要重点考虑以下几方面:一是采用M滤波技术,以适应不同运动状态下静止程度不同引起的测量误差变化;二是采用残差检验方法,以避免对零速的误检测导致滤波器发散;三是要充分利用磁力计这一辅助信息对航向精度保持的作用。
需要重点指出的是,美国MicroPNT计划的单兵导航方案中提及,可采用微型速率计辅助来提高定位精度;作者通过分析和试验验证发现,速率计并不能从根本上提高定位精度,主要原因如下:其一,速率计本身存在标度因数误差和安装误差,并不能精确测量人体的运动,在复杂运动条件下也难以建立误差模型;其二,零速修正是比速率计更为精确的辅助信息,通过试验发现,仅采用零速修正的定位精度与同时采用零速修正和速率计辅助的结果相当,而仅采用速率计辅助的定位精度则大大下降;其三,陀螺漂移造成的逐渐增长的航向角误差,是单兵导航技术另一项关键的误差源,采用速率计辅助并不能修正这一误差,所以不能提高定位精度。
3 样机研制及试验情况
3.1 样机研制情况
采用微机电惯性仪表设计了鞋式单兵自主导航设备,如图5所示,共包括导航、通讯和供电三个模块。
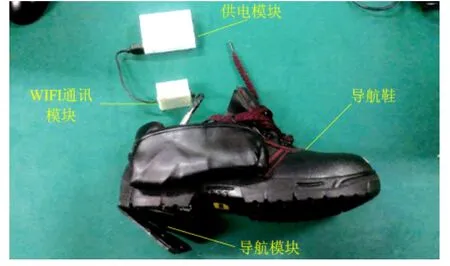
图5 鞋式单兵导航设备Fig.5 The shoe of navigation system of individual soldier
其中,导航模块包括陀螺、加速度计和导航计算机,如图6所示;陀螺测量范围1200(°)/s,实测零偏稳定性50(°)/h;加速度计测量范围18g,实测零偏稳定性500ug;导航计算机采用TMS320C6713B,主频200MHz。

图6 鞋式单兵导航设备的导航模块Fig.6 Navigation module of the shoe of navigation system of individual soldier
3.2 试验情况
在多种环境下对单兵自主导航设备进行了导航试验。在楼梯进行的试验结果如图7所示,可见,导航设备能够精确的描绘出人在楼梯上的运动轨迹。
图7 单兵导航设计楼梯试验Fig.7 The result of experiment on stairs
某次长时间试验过程中的定位误差如图8所示,可见,在20 min的时间内,定位误差不大于20 m。
3.3 总结
通过一系列的试验和分析,作者对单兵自主导航技术的认识可归纳如下:
1)经初步验证,采用惯导系统+零速修正的方案来实现单兵导航的方案是可行的;以目前微机电惯性仪表的性能水平,有望实现100米/小时的定位精度。
2)分析定位误差特性可知,陀螺漂移造成的不断增长的航向角误差,是目前影响定位精度的主要因素;尽管采用磁力计可以在一定程度上减小这一误差的影响,但根本途径只有进一步提高微机电陀螺的精度;采用微型速率计对提高导航精度没有实质性的帮助。
3)陀螺的测量范围是系统设计时需要考虑的一个重要参数;零速检测与误差修正技术是算法设计的关键所在。
4 结束语
单兵导航技术是美国MicroPNT计划的重要研究方向之一;采用微型惯导系统在零速修正下实现单兵导航是可行的,导航精度的提高有赖于微型陀螺仪性能的进一步提高。以目前微机电惯性仪表的性能,有望实现100 m/h的定位精度,满足短时间单兵自主导航需求;随着国内导航级微机电陀螺、微型核磁共振陀螺技术的进步,在未来5~10年内,有望实现10 m/d的微型单兵自主导航系统,满足长时间单兵导航需求。
[1]Andrei M.Shkel.Micro-Technology forPositioning,Navigation and Timing(μPNT)[R].DARPA/MTO for Public Release,2011,9.
[2]Andrei M.Shkel.Precision Navigation and Timing Enabled by Microtechnology:Are We There Yet?[R].The Southern California Section of the Institute of Navigation,2012,2.
[3]汪苑,林锦国.几种常用室内定位技术的探讨[J].中国仪器仪表,2011,54-57.[Wang Yuan,Lin Jin-guo.Indoor Location Technique Based on RFID [J],China Instrumentation.2011,54 -57.]
[4]Lauro Ojeda,Johann Borenstein.Non - GPS navigation with the personal dead-reckoning system [C].SPIE Defense and Security Conference,2007.
[5]Seong Yun Cho,Chan Gook Park.MEMS based pedestrian navigation system [J].The Journal of Navigation,2006,59,135-153.
[6]赵永翔,周怀北,陈淼等.卡尔曼滤波在室内定位系统实时跟踪中的应用 [J].武汉大学学报 (理学版)2009,55(6)[ZHAO Yong-xiang,ZHOU Huai-bei,CHEN Miao et al.Application of Kalman Filter in Indoor Positioning System for Real-Time Tracking[J].Journal of Wuhan University(Natural Science Edition).2009,55(6).]
