基于Power PC与FPGA的雷达天线远程操控系统设计实现
2014-07-05陈炜浩王金宁陈雪峰
陈炜浩,王金宁,陈雪峰
(中国电子科技集团公司第二十八研究所,江苏南京 210007)
1 应用背景
某雷达将需要的雷达信号通过网络送至远程显控台,并在远程显控台对雷达进行远程操控,如图1所示。

图1 雷达远程操控系统示意图
在雷达实际使用过程中,雷达操作员经常会在雷达“手控”模式下,使用手轮操控雷达天线来回反复扫描某个目标,观察目标回波的波形,对目标属性进行判断,如果手轮转动与雷达天线转动有较大延迟,会造成操作员手眼不协调,影响目标属性的判断。
2 延迟的产生
在远程操控系统中,雷达操控台位定时输出在该时间段内手轮转动的脉冲数,雷达接口设备接收到脉冲数后还原为手轮脉冲信号控制雷达天线。
从手轮转动到天线转动的延迟主要由以下几方面产生,如图2所示。

图2 信号延迟示意图
DELAY1为远程显控台从摇动手轮到输出网络报文的延迟,在实际的工作中DELAY1约为50ms;DELAY2为网络传输延迟,一般要求DELAY2小于2ms;DELAY3为雷达接口设备从接收网络报文到输出手轮信号的延迟;
DELAY4为雷达设计时从收到手轮信号到天线转动固定的机械延迟(DELAY4约100~200ms,操作员已经适应了该延迟);
本文主要针对DELAY3,设计雷达接口设备,在收到遥控终端送来的网络数据后,以很小的DELAY4延迟生成天线所需的信号。
3 方案设计
雷达天线的操控信号为AB相信号,如图3所示。A相位超前为正转,B相位超前为反转。雷达接口设备需要将网络数据转换为AB相信号,以实现雷达天线系统的远程操作控制。
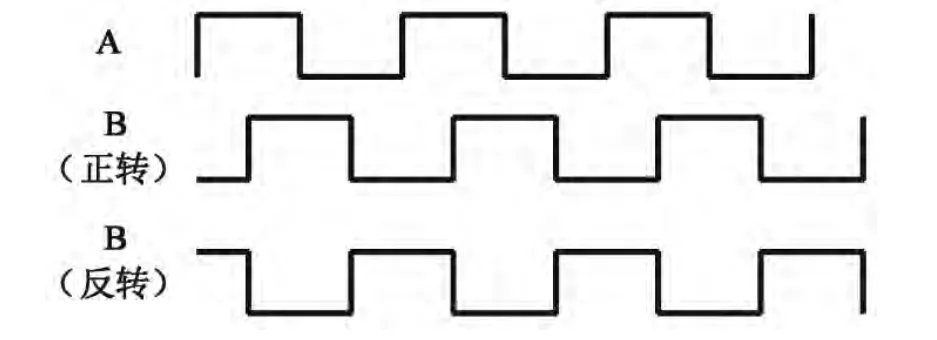
图3 手轮输出波形
为实现较小的延迟,选择具有较强通信能力的PowerPC作处理器,系统采用嵌入式Linux操作系统,结合FPGA进行设计。PowerPC模块主要接收网络送来的脉冲数,解析后通过LocalBus写入到FPGA的寄存器中,FPGA接收到脉冲数后进行处理输出AB相信号,如图4所示。
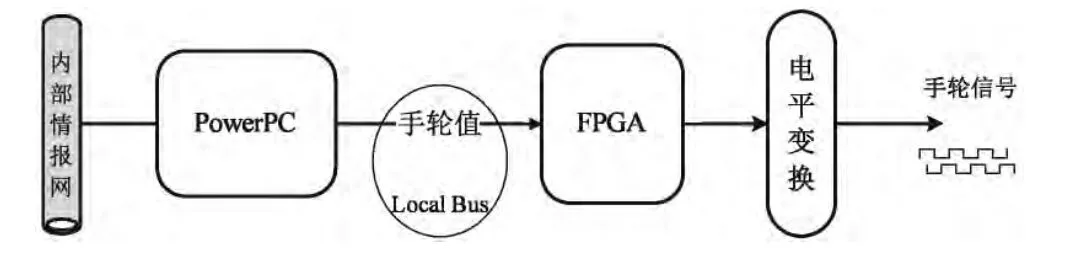
图4 雷达接口设备信号流程图
4PowerPC系统设计
4.1 硬件设计
PowerPC处理器选用Freescale公司的MPC8377E[1],该处理器集成e300c4处理器核,片内具有32Kbytes的指令cache和32Kbytes的数据cache,工作主频可达800Mhz。MPC8377E可以支持2GB DDR2内存。MPC8377E的本地LocalBus总线扩展一片NOR FLASH作为系统的存储空间。其作用是用来存储bootloader、操作系统内核、文件系统。通过88E1111网络芯片接入千兆光以太网(见图5)。
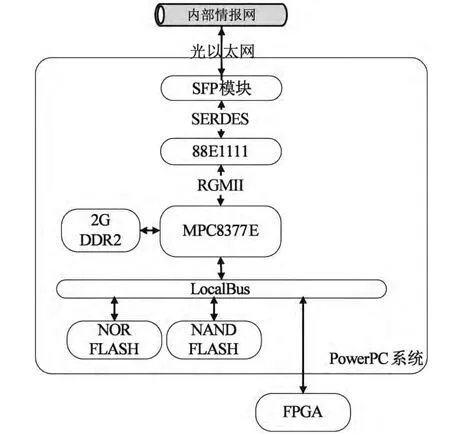
图5 PowerPC硬件系统架构
4.2 软件设计
PowerPC处理器运行远程操控控制程序和LocalBus总线驱动程序,远程操控控制程序通过网路接收雷达天线远程操控命令,对命令进行解析翻译,根据命令类型将操控命令通过LocalBus总线驱动程序向FPGA的相应寄存器写入控制命令。
LocalBus总线驱动程序实现主从设备号申请、设备注册、FPGA地址功能映射、设备硬件控制等功能[2]。Linux内核通过一个file_operations结构体组织对设备操作的具体实现函数,该驱动在设备注册时实现FPGA地址功能映射,通过file_operations结构体中fpga_write函数实现用户层内核层数据交互和FPGA数据写入[3]。
LocalBus配置为通用片选机制(GPCM),向FPGA写入手轮值,LocalBus写时序如图6所示。其中参数tWC,tAWCS,tCSWP,tAWE,tWEN可以由软件进行灵活配置,时序简单,易于FPGA设计实现。
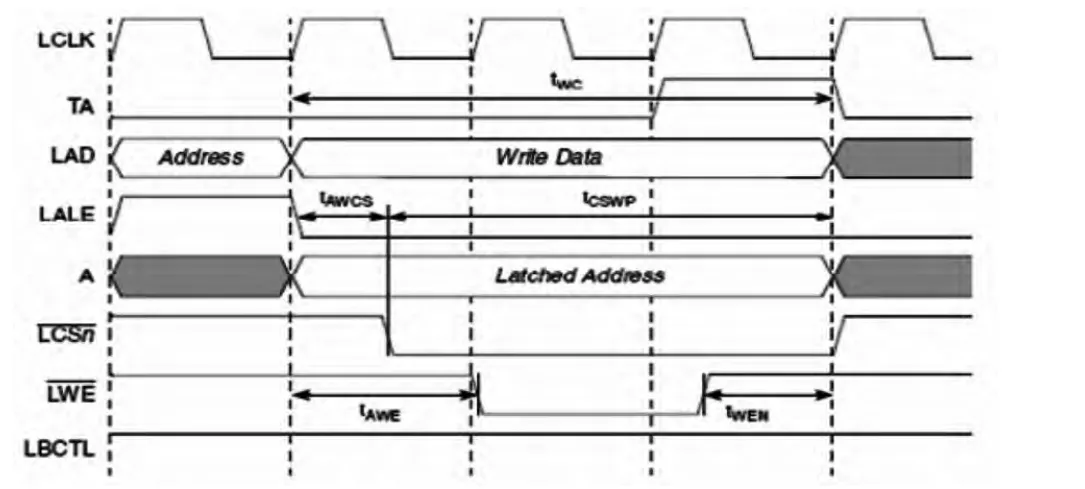
图6 LocalBus写时序
5 FPGA设计
FPGA 采用 Altera 公司 Straix系列的 EP1S25[4],PowerPC 将脉冲数写入到FPGA后,FPGA按照LocalBus写时序解析出手轮脉冲个数值,开始生成AB相信号。流程如图7所示。
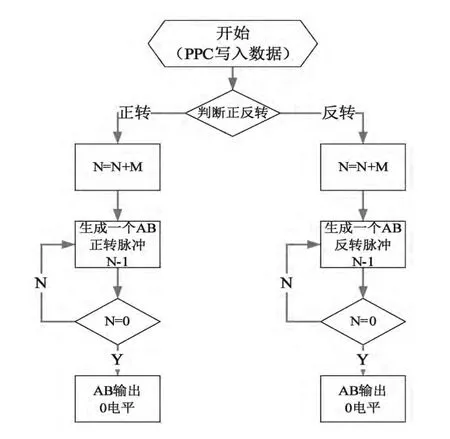
图7 FPGA手轮波形产生流程图
(1)FPGA解析出新的手轮脉冲值后,判断手轮是正转或反转;
(2)将脉冲值与N相加(N为还需要产生的脉冲个数);
(3)生成一个固定脉冲宽度、固定相位差的AB信号,每产生一次脉冲信号,N-1,直至N=0;
(4)AB输出0电平。
输入输出波形如图8所示。
6 实践与应用
经过实际测试,在输出AB相脉冲宽度4ms时,雷达接口设备从接收到网络信号到输出的延迟小于5ms,其中PowerPC从网络接收到LocalBus输出延迟小于3ms,FPGA从收到PowerPC写入数据到输出波形延迟最大约2ms。充分体现了嵌入式系统和FPGA的实时性优势。
本设计已经进行了实践及应用,经过长时间、大范围的使用,功能稳定,运行良好,在以后的工程应用中具备推广前景。
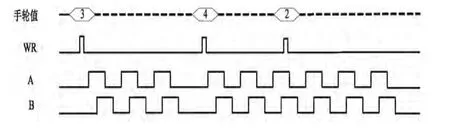
图8 FPGA手轮波形产生波形图
[1]Freescale Semiconductor.MPC8377EPowerQUICCTMII Pro ProcessorHardware Specifications[EB/OL].www.freescale.com.
[2]Jonathan Corbet,Alessandro Rubini&Greg Kroah-Hartman.LINUX设备驱动程序[M].魏永明,耿岳,钟书毅,译.3版.北京:中国电力出版社,2009.
[3]Daniel P.Bovet&Marco Cesati著.深入理解LINUX内核[M].陈莉君,张琼声,张宏伟,译.3版.北京:中国电力出版社,2009.
[4]Altera Corporation.Stratix Device Handbook[EB/OL].www.altera.com.
