基于旋量理论的农用自动化系统末端执行构件运动精度分析
2014-07-05程秀玲单水维
程秀玲,单水维
基于旋量理论的农用自动化系统末端执行构件运动精度分析
程秀玲1,单水维2
1.包头轻工职业技术学院,内蒙古包头014035
2.内蒙古第一机械制造集团有限责任公司,内蒙古包头014030
为了解决农用装置机械臂作业过程中生产效率低与人力成本较高等问题,建立一类农业用自动化系统结构模型,将自动化系统末端执行构件运动控制作为主要研究内容,运用旋量理论对系统末端执行构件运动精度进行分析,最终得到自动化系统末端执行构件位置和姿态误差,为后续农业用自动化系统控制提供一定依据。研究结果表明,通过使用旋量理论得到一类农业用自动化系统末端执行构件的运动误差模型,解决了误差模型不能反映系统实际运动误差的问题;随角度误差增加末端执行构件误差呈现增加趋势,且趋势较为明显,而随长度误差变化末端执行构件误差变化并不明显。
旋量理论;农业用自动化系统;末端执行构件;运动精度
1 引言
随着近年来农用机械领域对生产安全及生产效率的日益关注,各大装备厂商和科研院所加大了对农业用自动化系统的研究力度,通过农业用自动化系统的使用将大大减少作业人数,降低生产安全事故发生可能,提高农业生产效率。
国内学者田海波[1],李宪华[2],魏永泉[3]对农用机械装置中机械臂的性能及运动特性进行深入的研究;国外学者Judd R.P[4],Bai Y[5],Roth Z S[6]也对机械臂运行过程动力学特性及轨迹规划问题进行研究。但是目前而言对于农业作业自动化系统及其控制特性的研究相对而言较少。
因此,针对农业作业过程中生产效率低与人力成本较高等问题,本文以一类农业用自动化系统末端执行构件运动控制作为主要研究内容,建立一类农业用自动化系统结构模型,并运用旋量理论对系统末端执行构件运动精度进行分析,最终得到自动化系统末端执行构件位置和姿态误差,为后续农业用自动化系统控制提供一定依据。
2 农用自动化系统末端执行构件运动精度分析
农业用自动化系统如图1所示,分析得发现该农业用自动化系统自由度为6,末端执行构件使用向量对位姿进行表达,具体为:

图1 农业用自动化系统Fig.1Agricultural automatic system

式中:rx、ry、rz为末端执行构件位置广义坐标,令;为末端执行构件的广义姿态坐标,令φ=(φ1,φ2,φ3)。
运用旋量理论得到自动化系统自由度为n时,运动学正解等式:

式中:gst(0)为自动化系统中各旋转副在转角为零的条件下,与末端执行构件固联的工具坐标系在基准坐标系下位形;iξ为第i个旋转副在基准坐标系下运动旋量坐标;θ为旋转轴的旋转角度;iv为移动方向矢量;iω为旋转副方向矢量。
此时系统中旋转副运动旋量iξ为:

式中:ib为旋转轴上任意一点。
对于自动化系统旋转副,其旋量矩阵指数可以写为:

式中:eωˆθ为一旋转矩阵。
自动化系统末端执行构件运动旋量坐标表示为:

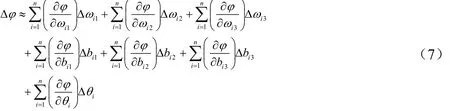
由于自动化系统制造、安装和传动误差等众多误差作用,导致结构参数和运动变量产生误差,这里将以上各种因素导致误差用符号1iωΔ、2iωΔ、3iωΔ、1ibΔ、2ibΔ、3ibΔ、iθΔ表示,所以自动化系统末端执行构件的位姿误差为:

令Mij(j=1,2,3,L,7)分别表示第i根连杆的第j个参数,j=1,2,3,L,7分别表示某一连杆的结构参数bi1、 bi2、bi3、ωi1、ωi2、ωi3和运动变量θi,自动化系统末端执行构件针对结构参数和运动变量的偏导为:

自动化系统末端执行构件位置状态对1ib、2ib、3ib、1iω、2iω、3iω和运动变量iθ的偏导为:

自动化系统末端执行构件姿态坐标参数对结构和运动变量参数的偏导为[8]:

式中:xn、yn、zn、xo、yo、zo、xa、ya、za、xp、yp、zp为基于欧拉角表示的姿态坐标;c、s为结构参数。
3 仿真算例
根据图1所示模型,令机构中il为500 mm,1il-为650 mm,2il-为600 mm,3il-为550 mm。则可以得到机构初始位姿为:
机构中各运动副均为旋转副,各运动副运动时间为2 s,具体运动规律为:

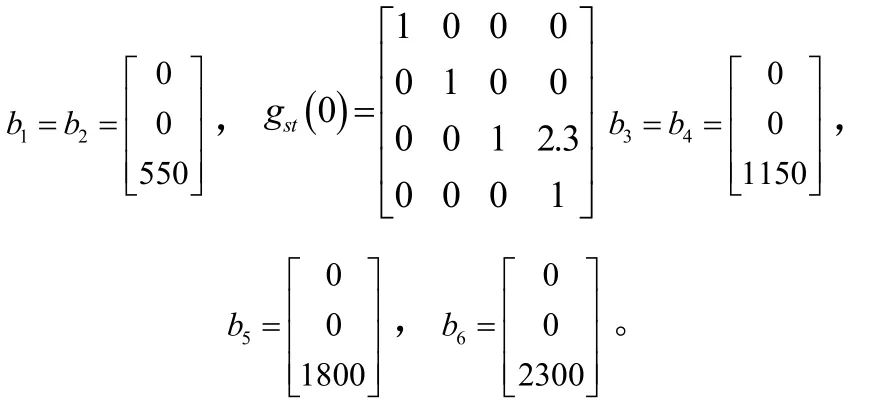
已知1b、2b、3b、4b、5b、6b关系为:
根据建立的理论模型及相关已知参数,求得农业用自动化系统末端执行构件标称位置及误差具体如下文所示。
图2为农业用自动化系统末端执行构件标称位置曲线。由图2可以看出,农业用自动化系统末端执行构件整体的变化区间为:-1.4到2.4 m,其中,z坐标标称曲线相对于x、y坐标而言,其变化范围最大,x坐标标称位置曲线始终大于0。
图3为在长度误差为0.005 m,角度误差为π/1000的条件下,农业用自动化系统末端执行构件位置误差曲线变化图。图3与图2规律基本相似,z坐标误差变化区间与x、y坐标相比较,其误差较大,且y坐标误差曲线始终大于0。
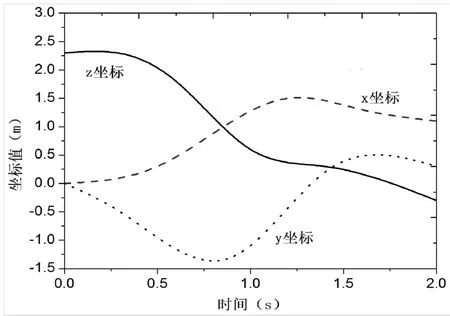
图2 农业用自动化系统末端执行构件标称位置曲线Fig.2Agricultural automatic system end-effector nominal position curve
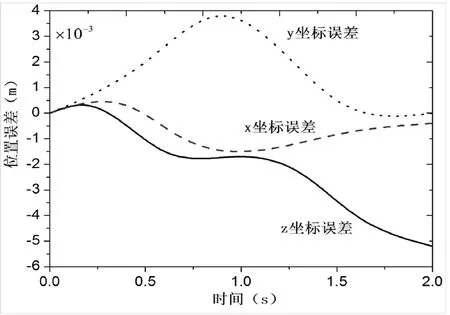
图3 农业用自动化系统末端执行构件位置误差Fig.3Agricultural automatic system end-effector position error
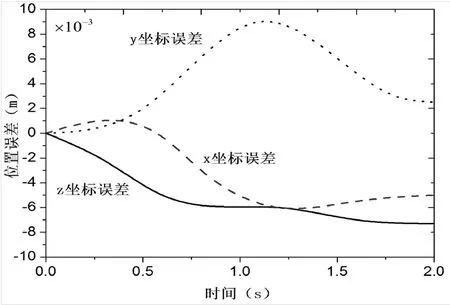
图4 农业用自动化系统末端执行构件位置误差Fig.4Agricultural automatic system end-effector nominal position error
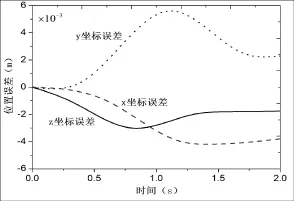
图5农业用自动化系统末端执行构件位置误差Fig.5Agricultural automatic system end-effector position error
图4 为在长度误差为0.005 m,角度误差为π/500的条件下,农业用自动化系统末端执行构件位置误差曲线变化图。图5与图4进行比较,可以发现随着角度误差的增加末端执行构件误差呈现增加的趋势,且趋势较为明显,图4中的具体x、y、z坐标误差变化趋势与图3基本一致。
图5为在长度误差为0.0005 m,角度误差为π/1000的条件下,农业用自动化系统末端执行构件位置误差曲线变化图。图5与图3、4进行对比,可以发现随着长度误差的变化末端执行构件误差变化并不明显,表明长度误差对末端执行构件位置误差的影响程度有限,但图5中的具体x、y、z坐标误差变化趋势仍与图2基本一致。
4 总结
本文为了解决农业生产作业过程中生产效率低与人力成本较高等问题,建立一类农业用自动化系统结构模型,将自动化系统末端执行构件运动控制作为主要研究内容,运用旋量理论对系统末端执行构件运动精度进行分析,最终得到自动化系统末端执行构件位置和姿态误差,为后续农业用自动化系统控制提供一定依据。研究结果表明:
(1)通过使用旋量理论得到一类农业用自动化系统末端执行构件的运动误差模型,解决了误差模型不能反映系统实际运动误差的问题;(2)随角度误差增加末端执行构件误差呈现增加趋势,且趋势较为明显,而随长度误差变化末端执行构件误差变化并不明显。
由于本文研究只是针对农业用自动化系统末端执行构件的运动精度进行分析,后续还将研究基于末端运动精度分析结论的末端执行构件的运动控制,从而最后完成对整个机构的完整性控制以及系统机构运动轨迹规划,此外有一点需要说明本文目前针对农业用自动化系统末端执行构件运动精度分析尚处于理论阶段,后续随着样机试制完成,将重点对装置理论进行实验验证,从而得到完整的农业用自动化系统末端执行构件运动精度控制理论。
[1]田海波,马宏伟,魏娟.串联机器人机械臂工作空间与结构参数研究[J].农业机械学报,2013,44(4):196-201
[2]李宪华,郭永存,张军,等.模块化六自由度机械臂逆运动学解算与验证[J].农业机械学报,2013,44(4):246-251
[3]冯青春,纪超,张俊雄,等.黄瓜采摘机械臂结构优化与运动分析[J].机械传动,201,41(2):244-248
[4]Judd R P,Knasinski.A technique to calibrate industrial robots with experiment verfication[J].IEEE Trans on Robotics&Automation,1991,6(1):20-30
[5]Bai Y,Wang D L.Improve the robot calibration accuracy using a dynamic online fuzzy error mapping system[J].IEEE Transaction on Systems,Man and Cybernetics,2004,34(2):1155-1160
[6]Roth Z S,Mooring B,Ravani B.An overview of robot calibration[J].IEEE Journal of Robotics and Automation, 1987,3(5):377-385
KinematicsAccuracy Analysis ofAgriculturalAutomatic System End-effector Based on Screw Theory
CHENG Xiu-ling1,SHAN Shui-wei2
1.Baotou Light Industry Vocational Technical College,Baotou014035,China
2.Inner Mongolia First Machinery Group Co.,Ltd,Baotou014030,China
In order to solve the problems of agricultural unit operation,low productivity and high labor costs and other,a class of agricultural automation system structure model was established,the main content of the end-effector motion control automation systems,simultaneous kinematics accuracy analysis of systems using screw theory end-effector,eventually the automatic system end-effector position and attitude error were got,which provide a basis for subsequent agricultural automation system control.The results show that screw theory use automated systems to establish a agricultural automation system end-effector motion errors mathematical model solves the error model can not reflect the actual movement of the system error problem;with the angle error increased,the end-effector error showed an increasing trend,and the trend is more obvious,and with the changes in body length error,the end-effector error did not change significantly.
Screw theory;agricultural automatic system;end-effector;kinematics accuracy
TH122
A
1000-2324(2014)05-0720-04
2013-03-11
2013-05-23
程秀玲(1980-),女,汉,硕士,讲师,研究方向:智能控制铸造.