宽角相机低空航测的精度分析
2014-07-05林宗坚解斐斐苏国中
林宗坚,解斐斐,苏国中
1.武汉大学遥感信息工程学院,湖北武汉 430079;2.中国测绘科学研究院,北京 100039
宽角相机低空航测的精度分析
林宗坚1,2,解斐斐1,2,苏国中2
1.武汉大学遥感信息工程学院,湖北武汉 430079;2.中国测绘科学研究院,北京 100039
首先从理论上对低空航测精度与相机像场角的关系进行定量分析,得出低空航测应尽可能使用宽角相机的结论;接着指明了单镜头相机扩大像场角的局限和现有市场上的组合宽角相机因重量过大而不适用于低空轻荷载无人机的不足,阐述了笔者研制的具有自检校自稳定功能的组合宽角低空轻小型相机的特点,尤其是实现组合成像静态误差和动态误差自检校的技术原理;针对大比例尺测图的实践,提出通过宽角相机大重叠航空摄影提高低空航测精度的技术建议;最后用典型工程生产数据验证了上述理论分析的正确性。
低空航测;组合宽角相机;二次计算成像;自检校;自稳定;精度分析
1 引 言
低空航测技术的发展弥补了卫星遥感和中高空航测在及时性与精细度方面的不足。卫星遥感和中高空航测经常受阻于阴云天气,不能在需要的时候得到及时的影像;或者为获取不良天气下的及时影像,采用微波雷达技术,从而放弃了光学影像的最具优势的精细度[1-2]。现实中,影像精细度的需求还包括厘米级精细度和建筑物三维精细度[3],这些是卫星遥感和中高空航测所难以满足的。
低空航测具有光度学方面的光能量优势[4],但也有几何学方面的窄像幅劣势[1]。这种劣势不仅使得作业效率低,更重要的是,它导致航测精度降低。为了解决精度低下的问题,根本之路是使用宽角相机[5]。近几年ISPRS学界关于在低空UAV上装载单相机进行航测的研究报导很多[4,6],但是关于装载组合宽角相机的研究报导却很少。其原因之一是当前市面上出售的组合宽角相机系统总重量大都在百千克量级,无法满足轻小型无人机使用[7-9],以致在有人机航测中近几年使用很成功的组合宽角相机未能在UAV低空航测中得以推广。因此本文专门讨论利用宽角相机提高低空航测精度的技术问题,具体包括:为什么低空航测必须使用宽角相机,单镜头相机为什么难以做成宽角,如何做成轻小型组合宽角相机,怎样利用宽角相机提高低空航测精度等。
2 低空航测精度分析
这里专门研究与宽角成像有关的精度问题。以下引用王之卓著《摄影测量原理》的经典理论来说明相机的像场角对低空航测的精度影响十分显著[10]。
2.1 相机定向精度
以单独像对的相对定向为例,相对定向精度可用各相对定向元素(ϕ、ϕ′、ω′、κ、κ′)误差的权倒数Q表示(表1)。
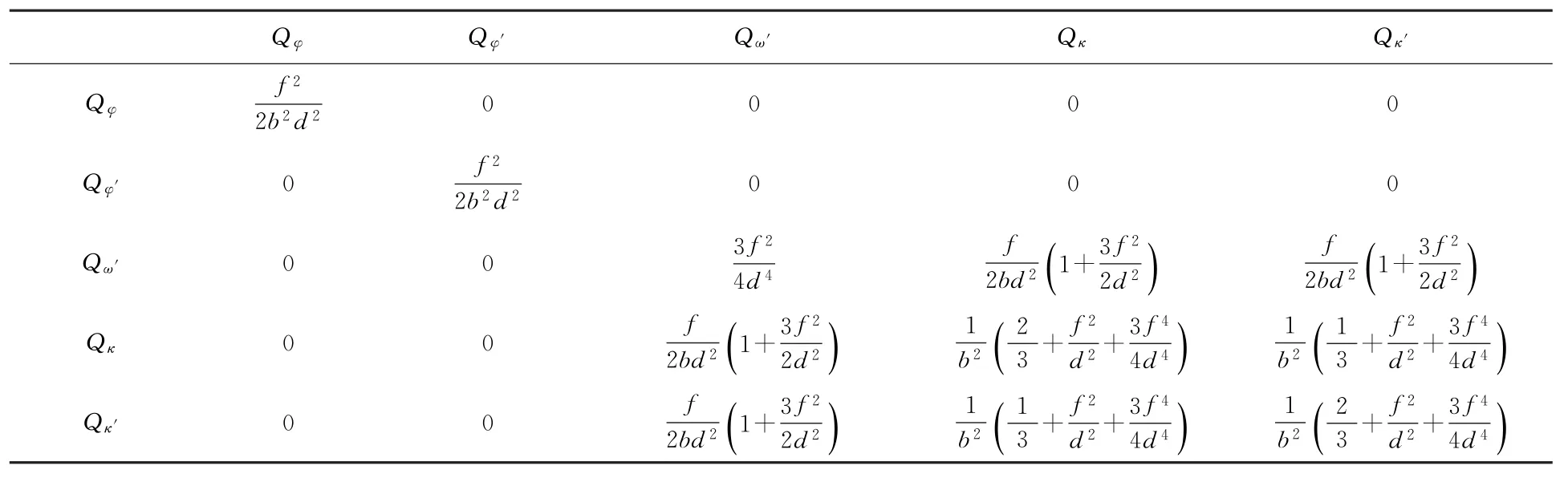
表1 相对定向元素误差权倒数及其相关项Tab.1 The error weight reciprocal of the elements of relative orientation and related items
作为简便的粗略分析,设b=d=f tgθ,其中,f为相机主距,θ为像场角的一半。通过几款不同像场角情况下的相对定向精度对比,可见像场角对相对定向精度的影响是很显著的(表2)。

表2 不同像场角下的相对定向精度对比Tab.2 The relative orientation accuracy comparison with different field angles
为了进一步显示量的比较,举例设b=d=4000像素,σq=0.1像素,则按式(1)可计算各相对定向元素的标准差

计算结果可见,扩大相机的像场角可以数倍地提高相对定向的精度(表3)。值得提示的是,当前市场上优质的IMU(惯导测姿仪)测姿精度在0.003°,这意味着,当使用窄角相机时要依靠IMU提高定向精度,而当使用宽角相机时则可用相对定向校正IMU的累积误差。定姿精度不仅涉及相对定向,而且涉及一切与中心投影(共线方程)有关的操作,涉及空中三角测量构网的精度。

表3 不同像场角下的各相对定向元素的标准差Tab.3 The standard deviation of every relative orientation elements with different field angles
2.2 测图精度
关于立体测图模型的高程与平面精度的估算方法,文献[10]中给出了计算公式

式中,σZ、σX、σY表示在立体模型中量测高程值与平面坐标的标准差;σP和σx分别表示立体模型中量测一个点的视差与坐标的标准差。值得注意的是,这里的σP和σx达不到前面相对定向算式中σq的精度,因为在数字摄影测量情况下,σq是一个立体像对内很多点的平差结果,一般能达到0.1像素,甚至更高精度,而σP和σx是针对一个具体量测点的误差值,一般在1~2个像素值。特别值得说明的是σP、σq、σx值不仅与像元大小有关,而且与影像的信噪比有关。决定影像信噪比有两个重要因素:一是实际地面景物的信息量,也就是通常所说的有没有明显地物或明显特征[11-13];另一是成像系统的光学分辨率,如果空气透明度很低,则光学分辨率降低,信噪比降低。低空航测应依据光度学中像面照度的距离平方反比定律,尽可能地降低飞行航高,以获取高信噪比的影像[14-15]。
式(2)还说明,在一个立体模型中,测图精度是不均匀的,中心部分精度高、边缘部分精度低(图1)。这应当成为测图工程中设计航线重叠度和精度评估值的理论依据。
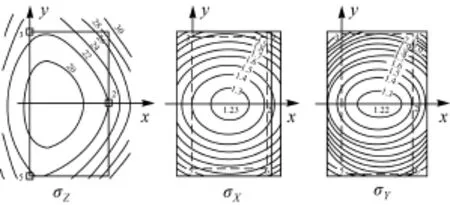
图1 测图精度分布图Fig.1 The distribution map of the mapping accuracy
3 用组合宽角相机提高低空航测精度
3.1 单镜头相机的局限性
如前所述,在低空条件下相机的像场角对航测精度有很大影响。因此低空航测应尽可能使用宽角相机。但是,制造高成像质量的单镜头宽角相机是很困难的[16-17]。根据光度学原理[18],轴外像点的照度可按下式计算

式中,E为主光轴上像点的照度;θ为视场角。这说明,随着相机像场角的扩大,像场边缘像点的光强度会急剧降低,从而导致边缘影像信噪比的急剧下降(表4)。

表4 不同视场角θ情况下的轴外像点与轴上像点照度比Tab.4 The illuminance ratio of images points off and on axis with different field anglesθ
基于这个原因,在数码相机出现后,就不再像胶片相机时代那样以昂贵的代价去补偿边缘像场劣质的缺陷,以制造特宽角镜头的航空相机,而是利用数字影像可拼接性,研制多镜头组合宽角相机,典型产品有DMC、UCD、SWDC等[8,19-20]。
3.2 具有自检校功能的轻小型组合宽角相机
组合宽角相机的基本原理是把主光轴各向倾斜的多镜头(多相机)所获取的多帧面阵影像通过二次计算成像的方法,构建成等效的单中心投影宽角影像。前述的几款国际品牌组合宽角相机,通过精密且强壮的光学机械设计实现了组合宽角成像,虽然成像质量优良,但是,整套设备重量在百公斤量级,不适用于低空飞行的轻小型无人机。为研制运用于低空轻荷载无人机的轻小型组合宽角相机,文献[21]提出了具有自检校自稳定功能的组合宽角成像方法,其核心技术有以下两点。
(1)设计了特殊的组合宽角构像方式,能将光机结构形变的影响转换成重叠区影像的可检测视差,通过影像匹配实现静态误差自检校。
本方法设计了4拼组合宽角相机的构像方式(图2)。4帧中心投影的影像在这里被拼接成一帧等效的单中心投影影像。拼接过程中要改正每次成像瞬间因轻薄机械形变产生的误差,实现向单中心投影的严密转换和拼接[22-23]。首先,通过影像匹配方法检测图中各相邻影像重叠区的影像视差Δxij和Δyij,然后由下列方程求解各相对方位元素的变化增量Δbx、Δby、Δbz、Δϕ、Δω、Δκ。

式中,f代表主距;i、j代表相邻影像片号。
将全部重叠区视差方程进行整体平差,即可解算出各片方位元素的精确值,从而实现4帧影像向单中心投影的精确转换。
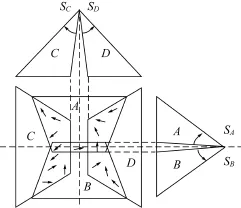
图2 具有自检校功能的组合宽角成像Fig.2 The wide-angle composed imaging with selfcalibration
(2)针对帘幕快门曝光过程和多相机相互间曝光延迟产生的动态成像误差,推导出外方位元素的运动方程及视差函数模型,实现了动态误差自检校。
根据帘幕快门的曝光过程(图3),曝光时间0.001 s,帘幕运行时间0.01 s,这个过程中飞机的6个自由度运动导致影像变形扭曲。
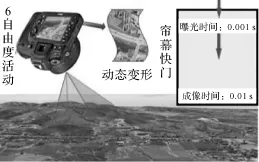
图3 帘幕快门动态影像变形Fig.3 The dynamic deformation with the curtain shutter
多相机间曝光延迟可以产生动态成像误差。在双相机的情况下(图4),前面的相机向左倾斜先曝光,飞机往前飞,后面的相机到达前面相机的刚才位置时向右倾斜曝光,在这段时间内飞机的摇摆运动,使得两个相机的影像拼不起来。
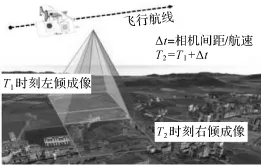
图4 相机间曝光时间差产生的动态变形Fig.4 The dynamic deformation with the camera exposure time difference
为检测与校正以上两种动态误差,导出了以下的相机方位元素运动方程及视差与相机方位元素的关系模型

式中,ΔSxi、ΔSyi、ΔSzi、Δφi、Δωi、Δκi为第i相机(镜头)的方位元素增量;Q为其对应的初始值;V为其对应的运动速度;ΔTi为第i相机的曝光时间延迟。Δxij、Δyij为第i、j影像重叠区的视差值。
用影像匹配方法检测各视差值后,即可通过上述运动方程求解方位元素动态增量,实现对影像的动态误差校正,这是自稳定技术。
3.3 宽角相机大重叠度低空航测
除了在设备上采用宽角相机提高航摄影像几何质量之外,还可配合采用大重叠度航空摄影的作业方法提高低空航测的实际精度。从第2节分析可知,为了提高低空航测精度,必须采用宽角相机的大幅面影像。但是,每个像对模型的测图精度,则是中间高,边缘低。因此,如若仅利用像对模型的中间影像测图(包括DEM、DOM和DLG),则可取得较高精度。实际的做法是,增加航空摄影的影像重叠度。例如,取航向重叠度80%,旁向重叠度60%,对于数码相机而言,增加航向重叠并不降低作业效率,需付出作业的代价仅是旁向重叠度的增加,但相比起成果精度的提高,其性价比是划算的。
4 工程实例分析
本文选取微山岛地区影像数据作为试验数据,进行工程实例分析。微山岛位于山东省济宁市微山县境内,是中国北方最大的内陆岛。微山岛地势西高东低,丘陵面积占70%,最高处海拔91.7 m,面积为9.13 km2,属于航空摄影测量空三加密困难地区。根据本次测区任务的形状特点、地形地貌特点和无人飞艇低空系统的特点,采用飞艇低空组合特宽角航空摄影测量技术。传感器四组合宽角相机LAC如图5所示,其焦距为24 mm,像元大小6μm,像幅大小为7168像素×8192像素,像场角100°×130°,总重15 kg。测区控制点布设采用航向和旁向每隔200 m布设一个控制点的方案。此次飞行获取的单相机影像和拼接后影像共9880幅,地面分辨率能达到4 cm。
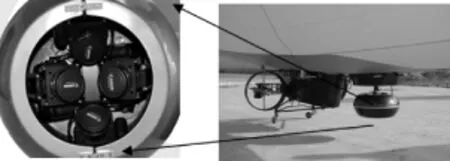
图5 四组合宽角相机LACFig.5 The structure of the four-combined wide-angle camera LAC
4.1 四组合宽角相机地面静态检校和飞行动态自检校精度
利用地面大型室外检校场检校4个子成像单元的镜头畸变、像平面畸变以及各成像单元的位置关系模型参数,依次改正航空摄影过程中成像的部分系统误差;而航摄过程中帘幕快门、异步控制等因素引起的几何畸变通过4成像单元自检校技术加以修正。试验表明:各成像单元引起的静态畸变高达40多个像素,经过地面检校后拼接中误差可控制在0.2像素以内(表5);仅考虑时序控制一项,运动引起的畸变就可能达到20像素以上,经过自检校修正中误差可控制在0.5像素以内(表6)。经过静态和动态检校生成的宽角影像的畸变可控制在1个像素以内,因此,宽角影像实现了立体模型的高精度,突破了传统1∶500航空摄影测量依靠全野外采集高程点的技术瓶颈。
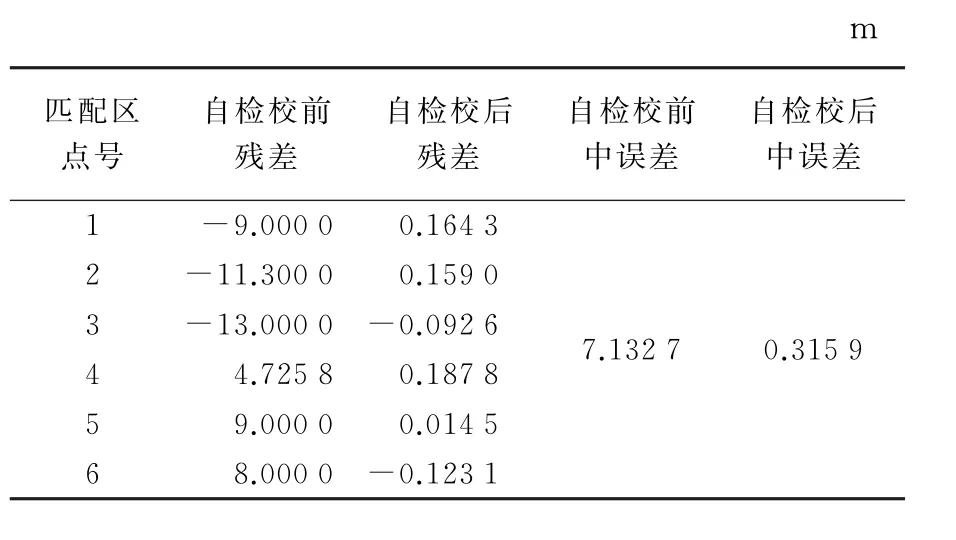
表5 相机地面静态检校精度表(互相关相机检校)Tab.5 The camera accuracy table with static ground calibration field(cross correlation of camera calibration)
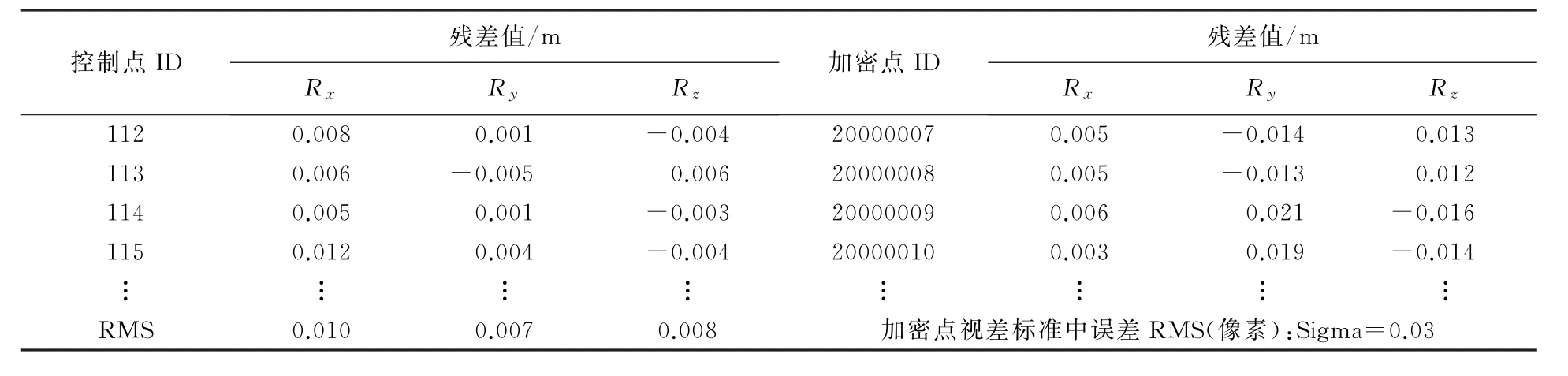
表6 相机飞行动态自检校精度表Tab.6 The camera accuracy table with dynamic calibration field
4.2 相对定向精度试验
这里用实际航拍的影像数据来说明像场角与相对定向精度的关系。将一个宽角影像的立体像对人为裁切成大中小3种不同的像场尺寸。在外方位元素完全相同(而且已知)的情况下,3种不同像场影像的相对定向结果显示出不同的精度(表7)。根据评估结果可知,虽然3种操作都已消除了上下视差,但是,像场角大的立体像对相对定向精度高,像场角小的相对定向精度低。
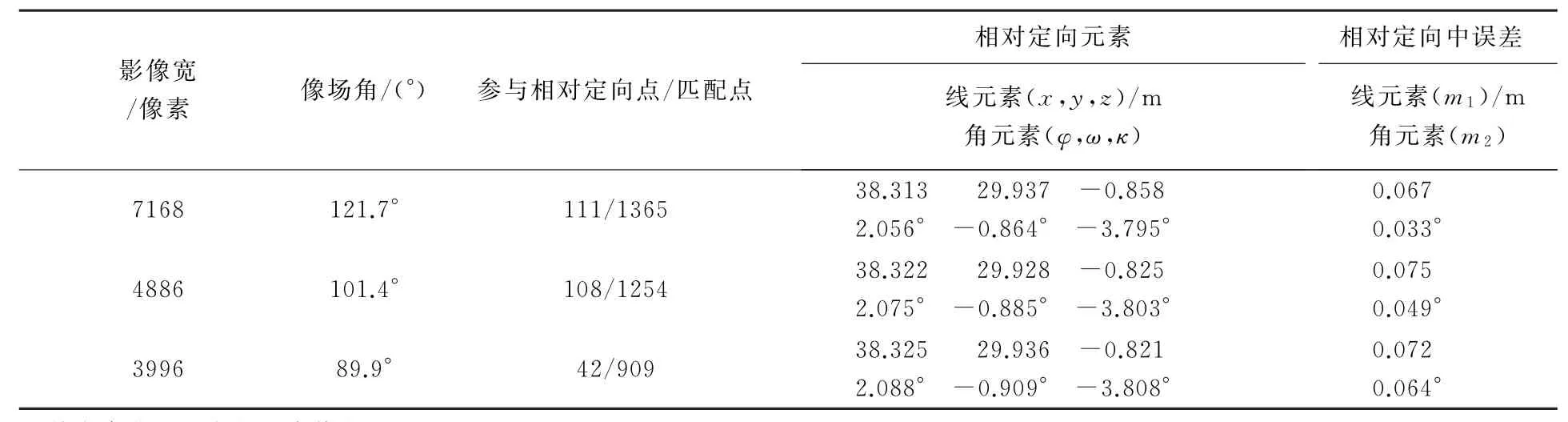
表7 不同视场角影像对相对定向精度对比Tab.7 The contrast of the relative orientation accuracy with different view angle
4.3 航测成果精度试验
试验1:不同重叠度影像平差精度对比试验
选取两条相邻航带共10张影像,修改像对间平均重叠度,利用摄影测量空三平差软件MAPATM进行空三加密。结果表明影像重叠度越高,平差精度越高(表8)。同时大重叠度可增大交会角(表9),通过量测同一地物在不同重叠度(即不同交会角)情况下的高程精度,可见点在高程方向的交会精度随影像重叠度增大有较大幅度提高。

表8 不同重叠度下空三平差精度Tab.8 The aerial triangulation accuracy with different overlaps

表9 不同重叠度下高程精度Tab.9 The vertical accuracy with different overlaps
试验2:实际空三加密试验
利用低空无人飞艇搭载特宽角组合相机LAC及GPS/IMU组合设备,通过航线设计,获取高分辨率的航测影像和比较好的POS定位定姿数据;然后,借助于现代航测自动空三软件MAP-ATM,突破摄影比例尺、姿态角、重叠度等方面的限制,快速且高自动化进行内定向、相对定向及空中三角测量,利用外业控制点进行区域网平差,获得高精度的外方位元素。
根据《1∶500、1∶1000、1∶2000地形图航空摄影测量内业规范》(GB7930—87),1∶500地形图的“平面位置中误差”按0.4 mm计算,即不大于500×0.000 4 m=0.2 m。加密统计表的结果都小于规范规定,完全合格。按照“平面高程中误差”内业加密点的高程中误差规定,平地在0.2 m以内,丘陵地在0.35 m以内,山地在0.5 m以内。经过严格的平差计算检查,结果都符合标准规定的1∶500精度的要求。利用抽图幅精度统计(表10),综合判定“无人飞艇航测在实施1∶500数字成图中的应用研究项目(微山岛测区)”成果质量批合格。

表10 外业散点检测的精度Tab.10 The accuracy by outside scatter detection
5 结 论
本文集中阐述了一条利用轻小型组合宽角相机提高无人机低空航测精度的技术路线。其要点如下:
(1)低空航测的精度与所用相机的像场角有很大关系,因此低空航测应尽可能使用宽角相机。
(2)具有自检校自稳定功能的轻小型组合宽角相机适用于低空轻荷载无人机,是一种低空航测的新型设备。
(3)利用宽角相机进行大重叠度低空航测,可以有效提高成果精度。
[1] LIN Z J.UAV for Mapping:Low Altitude Photogrammetry Survey[C]∥Proceedings of International Society of Photogrammetry and Remote Sensing.[S.l.]:ISPRS, 2008:1183-1186.
[2] LIN Zongjian,LI Deren,XU Yanying.General Review on the New Progress of Earth Observations[J].Science of Surveying and Mapping,2011,36(4):5-8.(林宗坚,李德仁,胥燕婴.对地观测技术最新进展评述[J].测绘科学, 2011,36(4):5-8.)
[3] LI Qingquan,LI Deren.Research on the Conceptual Frame of the Integration of 3D Spatial Data Model[J].Acta Geodaetica et Cartographica Sinica,1998,27(4):326-330.(李清泉,李德仁.三维空间数据模型集成的概念框架研究[J].测绘学报,1998,27(4):326-330.)
[4] ZHANG Y J,XIONG J X.Photogrammetric Processing of Low-altitude Images Acquired by Unpiloted Aerial Vehicles[J].The Photogrammetric Record,2011, 134(26):190-211.
[5] PAN Hongbo,ZHANG Guo,TANG Xinming,et al.Accuracy Analysis and Verification of ZY-3 Products[J].Acta Geodaetica et Cartographica Sinica,2013,42(5):735-744.(潘红播,张过,唐新明,等.资源三号测绘卫星影像产品精度分析与验证[J].测绘学报,2013,42(5):738-744.)
[6] NORBERT H,MATHIAS R.Dense Multiple Stereo Matching of Highly Overlapping UAV Imagery[C]∥Proceedings of International Society of Photogrammetry and Remote Sensing.[S.l.]:ISPRS,2012:387-392.
[7] LI Chang.The Necessary and Sufficient Condition of Camera Calibration and Attitude Determination Based on Vanishing Points with Their Uncertainty Analysis[J].Acta Geodaetica et Cartographica Sinica,2012,41(6): 851-856.(李畅.利用灭点进行相机检校与定姿的充要条件及其不确定性分析[J].测绘学报,2012,41(6):851-856.)
[8] LI Jian,LIU Xianlin,LIU Fengde.Mosaic Model of SWDC-4 Large Format Aerial Digital Camera and Accuracy Analysis of Stereo Mapping[J].Science of Surveying and Mapping, 2008,33(3):102-105.(李健,刘先林,刘凤德.SWDC-4大面阵数码航空相机拼接模型与立体测图精度分析[J].测绘科学,2008,33(3):102-105.)
[9] LI Jian,LIU Xianlin,WAN Youchuan.Generation of SWDC-4 Aerial Digital Camera Virtual Images[J].Journal of Geomatics and Information Science of Wuhan University,2008,33(5):450-453.(李健,刘先林,万幼川.SWDC-4数码航空相机虚拟影像生成[J].武汉大学学报:信息科学版,2008,33(5):450-453.)
[10] WANG Zhizhuo.Photogrammetry[M].Wuhan:Wuhan University Press,2007:34-64.(王之卓.摄影测量原理[M].武汉:武汉大学出版社,2007:34-64.)
[11] SHI W Z.Modeling Appositional and the Matic Uncertainties in Integration of Remote Sensing and Geographic Information Systems[M].Enschede:ITC Publication,1997.
[12] LIN Zongjian,ZH ANG Yonghong.Measurement of Information and Uncertainty of Remote Sensing and GIS Data[J].Journal of Geomatics and Information Science of Wuhan University,2006,31(7):570-572.(林宗坚,张永红.遥感与地理信息系统数据的信息量及不确定性[J].武汉大学学报:信息科学版,2006,31(7):570-572.)
[13] FU Peng,SUN Quansen,JI Zexuan,et al.A Method of SNR Estimation and Comparison for Remote Sensing Images[J].Acta Geodaetica et Cartographica Sinica, 2013,42(4):559-567.(傅鹏,孙权森,纪则轩,等.一种遥感图像信噪比评估和度量准则[J].测绘学报,2013,42(4): 559-567.)
[14] TAO Chunkan,TAO Chunkuang.The Theory of Optical Information[M].Beijing:Science Press,2005.(陶纯堪,陶纯匡.光学信息论[M].北京:科学出版社,2005.)
[15] LIN Z J,DENG B.Quantifying Degrees of Information in Remote Sensing Imagery[C]∥Proceedings of the 8th International Symposium on Spatial Accuracy Assessment on Natural Resources and Environmental Sciences.Shanghai:[s.n.],2008:201-205.
[16] TANG L,DRSTEL C,JACOBSEN K,et al.Geometric Accuracy Potential of the Digital Modular Camera[J].International Archives of Photogrammetry and Remote Sensing,2000,33(B4):103-106.
[17] ZHANG Zuxun.Aspects on Aerial Digital Cameras[J].Engineering of Surveying and Mapping,2004,13(2):1-5.(张祖勋.航空数码相机及其有关问题[J].测绘工程, 2004,13(2):1-5.)
[18] LI Xiangning.Engineering Optics[M].Beijing:Science Press, 2005.(李湘宁.工程光学[M].北京:科学出版社.2005.)
[19] LEBERL F.The Ultracam Large Form at Aerial Digital Camera System[C]∥Proceedings of the American Society for Photogrammetry&Remote Sensing.Anchorage:[s.n.],2003.
[20] TANG L,DORSTEL C,JACOBSEN K,et al.Geometric Accuracy Potential of the Digital Modular Camera[C]∥Proceedings of IAPRS.Amsterdam:[s.n.],2000.
[21] LIN Zongjian,SU Guozhong,XIE Feifei.UAV Borne Low Altitude Photogrammetry System[C]∥Proceedings of International Society of Photogrammetry and Remote Sensing.[S.l.]:ISPRS,2012:415-423.
[22] CUI Hongxia.Research on Photogrammetry with Digital Frame Camera Based on Low Altitude Unmanned Aerial Vehicle(UAV)System[D].Wuhan:Wuhan University, 2006.(崔红霞.无人机低空数码摄影测量系统研究[D].武汉:武汉大学,2006.)
[23] YAO Na.Research on Key Technologies of Low Altitude UAV Borne Multi-head and Wide-angle Composite Cameras and Their Performance Evaluation[D].Wuhan: Wuhan University,2013.(姚娜.低空无人机载组合宽角相机关键技术研究与性能分析[D].武汉:武汉大学,2013.)
(责任编辑:宋启凡)
Accuracy Analysis of Low Altitude Photogrammetry with Wide-angle Camera
LIN Zongjian1,2,XIE Feifei1,2,SU Guozhong2
1.School of Remote Sensing and Information Engineering,Wuhan University,Wuhan 430079,China;2.Chinese Academy of Surveying and Mapping,Beijing 100039,China
Firstly,the relationship between the accuracy of low altitude aerial photogrammetry and the field angle of camera is made by a quantitative analysis from the theory.The conclusion that the low altitude photogrammetry should use wide-angle camera as much as possible is done.Then,the limitation of the single lens camera to expand field angle and the combined wide-angle camera existing on the market not suitable for light load of low altitude UAV(unmanned aerial vehicle)due to excessive weight are pointed out.The characteristics of combined wide-angle low altitude light camera with self-calibration and self-stabilization developed by the author are described,especially the principle of self-calibration for the combination of static error and dynamic error.Based on the practice of large scale mapping,a technical procedure in aerial photography by taking with wide-angle camera and large overlap simultaneously for improving the accuracy of low altitude photogrammetry is proposed.The typical engineering produced data is used to verity the above theoretical analysis.
low attitude photogrammetry;composed wide-angle camera;computational reproduced imagery;self-calibration;self-stability;accuracy analysis
LIN Zongjian(1943—),male,professor, PhD supervisor,majors in photogrammetry and remote sensing.
P231
A
1001-1595(2014)10-0991-07
国家863计划(2013AA063905);国家自然科学基金(41371425;41271451)
2014-03-06
林宗坚(1943—),男,教授,博士生导师,研究方向为摄影测量与遥感.
E-mail:lincasm@casm.ac.cn
LIN Zongjian,XIE Feifei,SU Guozhong.Accuracy Analysis of Low Altitude Photogrammetry with Wide-angle Camera[J].Acta Geodaetica et Cartographica Sinica,2014,43(10):991-997.(林宗坚,解斐斐,苏国中.宽角相机低空航测的精度分析[J].测绘学报, 2014,43(10):991-997.)
10.13485/j.cnki.11-2089.2014.0146
修回日期:2014-07-01