新型雕刻机器人控制策略的研究
2014-07-04罗继曼张明山安玉振孙晓伟
罗继曼,张明山,安玉振,孙晓伟
(沈阳建筑大学交通与机械工程学院,辽宁 沈阳110168)
0 引言
新型雕刻机器人能够5自由度的运动,即是实现X,Y,Z轴平动和绕X,Y转动。与传统5自由度串联机械手相比,具有结构简单、承载能力强、精度高和末端件惯性小等优点,在高速,大承载能力的场合,与串联机器人相比具有明显优势。另外,雕刻机器人相对于传统的5自由度串联机械手具有反应速度快,积累误差小,易于实现的优点。在运动学和动力学方面,参考文献[1-4]对并联机器人的发展史、位置、奇异性和运动学进行了分析,参考文献[5-6]对各种并联机构的动力学进行了分析与研究;在控制策略方面,参考文献[7-9]对并联机构各种控制算法以及仿真方法进行了研究。雕刻机器人拥有合适的运动控制策略,能够保证刀尖点运动过程中具有较好的位置精度,减少了位置控制误差,从而获得较好的表面加工质量。
1 雕刻并联头运动学分析
新型混联雕刻机器人由机床本体和雕刻并联头2部分组成。机床本体主要实现X,Y轴的平动(X轴有1个伺服电机控制,实现X轴平动;Y轴有2个伺服电机控制同步控制,同步实现Y轴的平动),雕刻并联头有3个伺服电机控制。新型混联雕刻机器人如图1所示。
雕刻机器人的雕刻并联头,是由静平台、动平台、伸缩杆和约束链4部分组成,如图2所示。其中,3根伸缩杆与静平台通过虎克铰链相连,通过球铰链与动平台相连,伸缩杆均为移动副,3个移动副为本机构的3个驱动副。伸缩杆通过虎克铰与静平台相连,通过另一端与动平台保持固定。

图1 新型混联雕刻机器人

图2 雕刻并联头
静平台的外接圆半径为R1,静坐标系原点O与静平台质心重合,其中,Y轴恰好通过B2点,Z轴垂直向上,X轴与B2B3轴相交。动平台的外接圆半径为R2,动坐标原点p与位于动平台的质心,其中,y轴通过b2点,z轴垂直向上,x轴与b1b2轴相交。
由坐标转化建立如下方程:

动坐标系中,末端执行器p相对于静坐标系的齐次方程为:
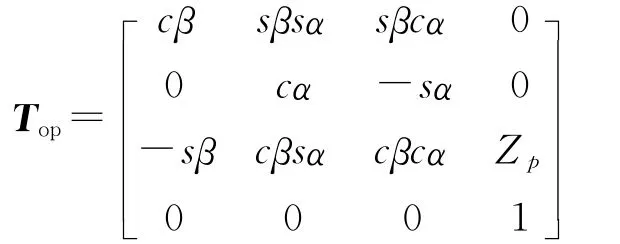
c为cos,s为sin,下同。因此,3个驱动杆杆长矢量Li可在固定坐标系中,表示为:

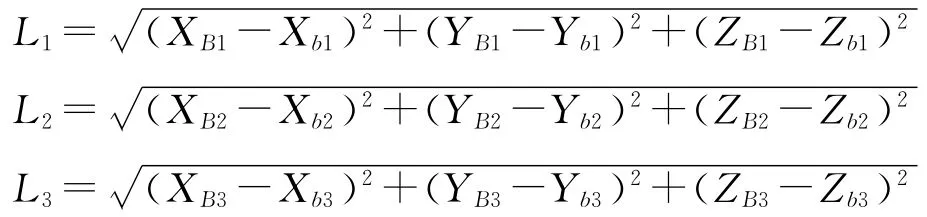
3根伸缩杆的杆长为:

运动学逆解为:
根据解析法求得α,β,Zp分别为:

刀尖点在静坐标系的位置矢量为:

2 混联雕刻机器人控制策略的研究
2.1 PD控制
PD控制器结构简单、实时计算量小,它是机器人运动控制中最常用的一种控制器。系统控制如图3所示。
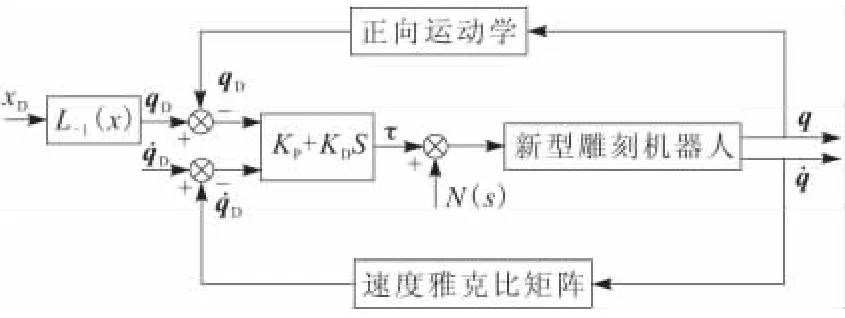
图3 PD控制系统
KD=diag(KD1,KD2,KD3),KDi>0 (i=1,2,3);KP=diag(KP1,KP2,KP3),KPi>0(i=1,2,3);L-1(x)为雕刻机器人运动学逆解;xD为刀尖点的期望位置;N(S)为扰动项;qD为关节的期望位置;q为关节的实际位置D为关节的期望速度;q为关节的实际速度。新型雕刻机器人雕刻并联头关节空间的动力学方程为:

PD控制规律为:

2.2 PD加重力补偿控制
PD加重力补偿控制是在传统PD控制基础上考虑了重力补偿因素的一种控制策略,相比其他派生控制策略具有易于实现的特点。该新型控制策略由于考虑重力补偿,在机器人高速运动的情况下具有较好的控制效果。系统控制如图4所示。

图4 PD加重力补偿系统
PD加重力补偿的控制规律为:

2.3 计算力矩法
计算力矩控制是以PD控制为基础。通过在PD控制上加入速度反馈、加速度前馈和重力补偿得到。在计算力矩控制法作用下,控制系统如图5所示。
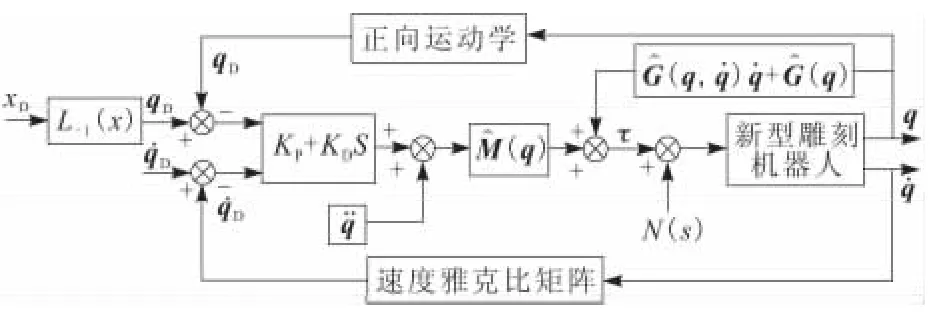
图5 计算力矩法控制系统

3 3种控制策略的位置控制仿真
设新型雕刻机器人雕刻并联头的轨迹模型为:

静平台的质量为M=150 kg,静平台外接圆半径R1=0.378 m,动平台的质量为mp=35 kg,动平台外接圆半径R2=0.25 m,外接圆3根驱动杆的质量完全相同mt=25 kg,仿真时间为6 s。
3.1 PD控制
参数设置:KD=diag(6 000,6 000,6 000),KP=diag(2 000,2 000,2 000),外部干扰信号取最小值为0,最大值为1 000的随机信号。
根据PD控制算法,得出了动平台刀尖点的位置误差曲线和驱动力的变化曲线。Matlab/Simulink仿真结果如图6所示。
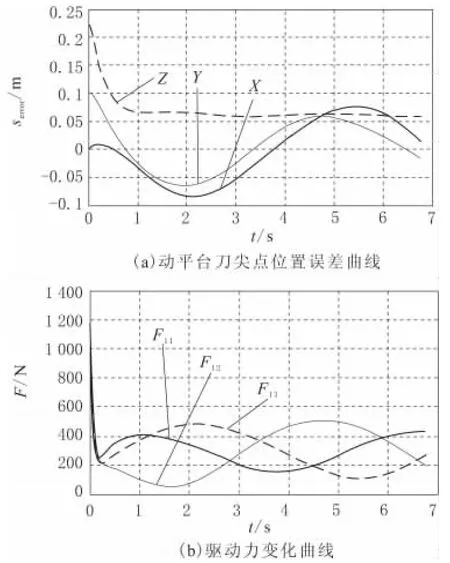
图6 PD控制
3.2 PD加重力补偿控制
参数设置:KD=diag(6 000,6 000,6 000),KP=diag(2 000,2 000,2 000),外部干扰信号取最小值为0,最大值为1 000的随机信号。
根据PD加重力补偿控制算法,得出了动平台刀尖点的位置误差曲线和驱动力的变化曲线。Matlab/Simulink仿真结果如图7所示。
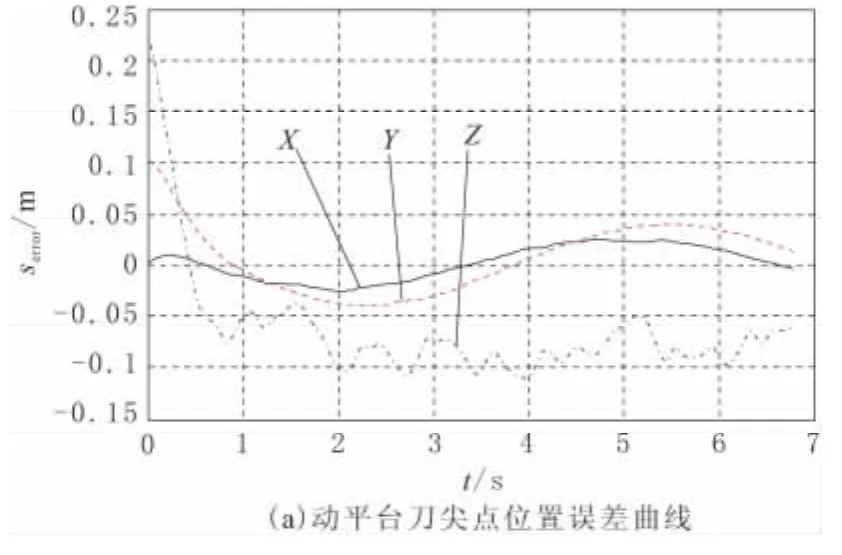

图7 PD加重力补偿控制
3.3 计算力矩法
参数设置:KD=diag(6 000,6 000,6 000),KP=diag(300,300,300),外部干扰信号取最小值为0,最大值为1 000的随机信号。
根据计算控制算法,得出了动平台刀尖点的位置误差曲线和驱动力变化曲线。Matlab/Simulink仿真结果如图8所示。

图8 计算力矩控制
根据图6~图8得出以下结论:
a.当新型雕刻机器人受到外界干扰后,在仿真时间段内,动平台刀尖点的位置误差曲线随时间变化,都逐渐都趋向于0。计算力矩法的位置误差曲线随时间回归0的速度最快,效果最好。
b.当新型雕刻机器人受到外界干扰后,在仿真时间段内,PD控制算法驱动力随时间变化且始终存在,PD加重力补偿控制算法随时间变化跳跃较大,计算力矩法控制驱动力随时间变化很快趋近于零。
4 结束语
基于新型雕刻机器人的运动学模型,研究了新型雕刻机器人雕刻并联头的3种控制策略。针对新型雕刻机器人的3种控制算法,采用Matlab/Simulink软件进行仿真,对比得知,计算力矩法效果较好,具有较强的外界抗干扰性。因此,采用计算力矩法,适合5自由度雕刻机器人。
[1] 刘善增,于跃庆,佀国宁,等.3自由度并联机器人的运动学与动力学分析[J].机械工程学报,2009,45(8):11-17.
[2] 虞启凯,游有鹏,韩江义.3-UrSR6自由度并联机构位置分析[J].农业机械学报,2011,42(12):215-219.
[3] PatanèF,Cappa P.A 3-DOF parallel robot with spherical motion for the rehabilitation and evaluation of balance performance[J].IEEE Transactions on Neural Systems and Rehabilitation Engineering,2011,19(2):157-166.
[4] 李长河,蔡光起.并联机床的发展与与国内外的研究现状[J].青岛理工大学学报,2008,29(1):7-13.
[5] 贾小辉,田延岭,张大卫.3-RRP柔性并联机构动力学分析[J].农业机械学报,2010,41(10):199-203.
[6] Lauzier N,Gosselin C.3-DOF cartesian force limiting device based on the delta architecture for safe physical human-robot interaction[A].2010 IEEE International Conference on Robotics and Automation[C].USA:Anchorage Alaska,2010.3420-3425.
[7] 黄茹楠,高英杰,王洪瑞.并联机器人的一种鲁棒最优控制结构[J].燕山大学学报,1999,23(2):175-177.
[8] 温敬召.并联机器人模型及其控制策略的研究[D].武汉:武汉理工大学,2012.
[9] 王胜开,王正林,陈国顺,等.Matlab/Simulink与控制系统仿真.3版[M].北京:电子工业出版社,2012.
