基于卡尔曼滤波滑模变结构转子位置观测器的PMSM无差拍控制
2014-07-04邱忠才郭冀岭王斌肖建
邱忠才, 郭冀岭, 王斌, 肖建
(西南交通大学电气工程学院,四川成都610031)
0 引言
永磁同步电机(permanent magnet synchronous machines,PMSM)是一个多变量、强耦合、非线性的高阶系统。其无转速传感器控制研究对于解决转速传感器带来的安装问题、体积变大、干扰和可靠性降低的问题具有重要意义。关于永磁同步电机的转子位置和转速辨识,目前观测器的估算方法主要有:自适应观测器[1]、卡尔曼滤波器[2]、滑模变结构观测器(sliding mode observer,SMO)[3-6]等。其中的滑模观测器的观测方法具有对电机参数变化不敏感,具有较强的鲁棒性特点。但是滑模观测器有系统抖振的问题存在,还要进行相位补偿等不足。
无差拍控制算法[7-8],根据电机和逆变器在同步轴系下的数学模型预测下一时刻逆变器的开关信号。这种算法为控制系统提供了低转矩脉动和高电流频率响应,是永磁同步电机电流预测的理想控制方式。相比于传统的矢量控制可以得到更高的动态响应性能和更小的电流谐波分量。
本文所设计的新型滑模变结构观测器,采用sigmoid函数减小抖振,用卡尔曼滤波器代替低通滤波器提取反电势然后进行转子位置角的计算,设计锁相环进行转速的提取。根据无差拍控制的思想,推导出了永磁同步电机电流预测方程,无差拍电流控制器根据电流给定和反馈值计算得到电压矢量,通过空间矢量脉宽调制模块将电压矢量转换为开关信号。通过实验验证了所设计的永磁同步电机无转速无差拍控制系统的正确性。
1 永磁同步电机模型
滑模变结构转子位置、转速观测器是在永磁同步电机两相静止坐标系下的数学模型进行分析设计,而无差拍控制策略是在同步旋转坐标系下推导得出,其两种坐标系下的数学模型分别如下。
1.1 两相静止坐标系下数学模型
PMSM在两相静止坐标系下的数学模型为

反电动势方程为

式中:iα、iβ、uα、uβ、eα、eβ分别为定子电流、电压、反电势在α、β轴的分量;Rs为定子相电阻;Ls为定子电感;ψf为转子永磁体磁链;ωr为转子角速度;θ为转子角位置。
1.2 两相同步旋转坐标系下数学模型
PMSM在两相同步旋转坐标系下的数学模型为

式中:id、iq、ud、uq分别为定子电流、电压在 d、q 轴的分量;对于表贴式永磁同步电机d、q轴电感有Ld=Lq=Ls。
2 新型滑模观测器设计
2.1 常规的滑模观测器
根据数学模型和滑模变结构理论定义切换函数为

is=[iαiβ]T为电流实际反馈值,选取切换面为

通常电流观测器

式(6)中的 zα、zβ的表达式为

k为滑模增益。由式(6)减去式(1)得电流误差动态方程为

由等效控制理论得到

通过低通滤波器滤波之后获得平滑的感应电动为

由式(2)得估算转子位置角为

低通滤波器会带来相位延迟,并且延迟的相位与截止频率和输入信号的角频率有关,得补偿相位为

考虑相位补偿之后的转子位置角为

转速通过对转子位置的微分获得

图1为传统滑模观测器结构。

图1 传统滑模观测器结构Fig.1 Structure diagram of conventional sliding mode observer
构造正定的李亚普诺夫函数,即

对式(16)求导,并把式(9)带入之后可得滑模观测器的稳定条件为

2.2 改进的新型滑模观测器
2.2.1 sigmoid函数减小抖振
根据滑模变结构理论,在实际系统中由于切换开关的不理想性以及系统存在的惯性等原因,抖振现象是必然存在的。高频的抖振不仅增加了系统的能量损耗、影响了控制准确性,而且很容易触发系统中没有建模的高频部分,从而严重影响系统性能甚至使系统失去稳定性。抖振只能被削弱而不能被彻底消除,为了减小抖振,采用sigmoid函数(18)取代常数切换的控制函数式(8),新 zα、zβ的表达式为(19)。


其中,k为滑模增益。
2.2.2 开关增益自适应律选取
采用sigmoid函数取代sign函数,同样证明可得稳定条件是式(17),由式(17)可以看出为了满足稳定条件,滑模增益必须足够大,但是k过大会造成抖振噪声,导致不必要的估计误差,因此对开关增益采用如下自适应律,即

显然式(20)确定的自适应率自然满足式(17)。
2.2.3 扩展卡尔曼滤波器提取反电势
从前面常规的SMO分析可知,通过一阶低通滤波器获得反电势来计算转子位置角的时候会导致相位滞后,所以要进行相位补偿,为了改善这个问题构造了一个具有扩展卡尔曼滤波器结构的模型式(22)进行反电势的提取,根据式(26)进行转子位置角的计算。用该扩展卡尔曼滤波器进行反电势获取,去除高次谐波,并进行转子位置角计算可以不用相位补偿就可以有较小的转子位置角误差。

构造反电势观测器,即

式中,k2是正的常数。
式(22)减去式(21)得

构造李亚普诺夫函数来证明式(23)的稳定性

对式(24)求导并把式(23)带入后可得

因此设计的扩展卡尔曼反电势观测器是稳定的。通过观测得到的反电势通过式(12)就可以得到电机的转子位置角为

可以省去相位补偿环节。
2.2.4 锁相环进行转速估计
文献[6]指出,扩展卡尔曼滤波器可以辨识出转速,但是响应速度比较慢,转速辨识的快慢不影响电势的获取,所以上节用来进行反电势提取的卡尔曼滤波器可以有效的滤除高次谐波扰动。采用锁相环获得电机的转速,可以解决由转子位置角进行微分计算转速的扰动问题。
由永磁同步电机数学公式(2)可得

由观测得到反电势和锁相环估算的转速积分后得来的转子位置角来跟踪实际转子位置角。
定义偏差值为

经过PI环节得到估算转子电角速度ω^r,然后经过积分来跟踪实际转子位置角变化。转速检测的锁相环见图2。其输入是卡尔曼滤波器的输出e^α、e^β,输出是转子电角速度观测值。该新型滑模观测器如图3,采用sigmiod函数代替sign函数,经过卡尔曼滤波器滤波后,再采用锁相环技术进行转速估算,具有结构简单、对电机参数不敏感、转速辨识响应速度快、避免了通过转子位置角微分计算导致的运算误差等特点。

图2 锁相环结构图Fig.2 Structure diagram of PLL

图3 新滑模观测器结构Fig.3 Structure diagram of novel sliding mode observer
3 无差拍控制
电机在dq坐标下的数学公式(3)可以写为

对式(29)求解可得连续域通解为

对上式离散化处理,做如下假设,在采样时间T足够小的条件下,系统输入变量u在一个T内基本不变,变量D代表反电动势影响,相对电流来说变化缓慢,同样认为在一个T内基本不变,得到离散通解为

在采样T足够小的条件下,再做如下近似,即

带入式(31)后可得电流预测模型,即

式中:
由式(33)可得

由无差拍控制律可知,要求dq电流的下一周期预测值等于电流给定值,即

带入式(34)可以得到dq坐标系下的定子电压计算公式为


4 实验分析
基于本文设计的新型滑模变结构永磁同步电机转子位置观测器和无差拍控制策略,进行了实验研究,系统结构如图4所示。实验对象为表贴式永磁同步电机,电机参数是:额定功率2.2 kW,额定电压380 V,额定电流5.1 A,额定转矩14 N·m,额定转速1 500 r/min,额定磁链0.55 T,转动惯量0.015 4 kg·m2,75℃时候的相电阻 3.45 Ω,定子电感0.012 H,极对数2。
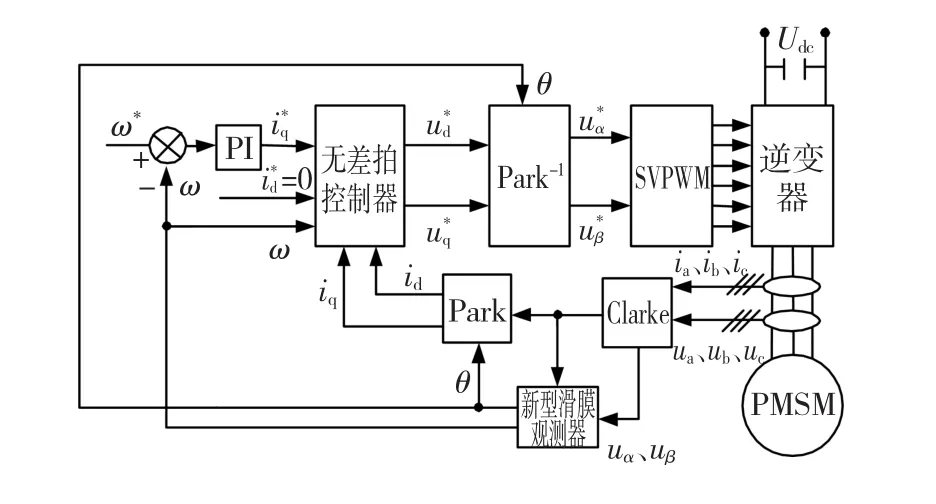
图4 系统结构框图Fig.4 Block diagram of system
交—直—交主电路结构中的交直环节由三相自耦调压器和三相不控整流器实现,中间直流环节用电容器完成滤波,直流电压大小通过自耦调压器进行调节,逆变器由3只IGBT加缓冲电路构成。核心控制芯片选用 TMS320F2812,驱动电路选用2SC0108T芯片,实验主电路和控制电路如图5(a)所示。
电机采用永磁同步电机—直流电机同轴连接机组,直流电机功率2.2 kW,他励方式,直流电机的电枢绕组与电阻箱相连。直流电机作发电机运行,为永磁同步电机的负载,如图5(b)所示。电机配有欧姆龙增量式光电编码器,用来测量转速和转子位置作为实际值与本设计的滑模变结构转速、转子位置观测器的结果对比。
实验中,先给定转速450 r/min,用增量式光电编码器检测到的电机转子位置角和转速完成电机的矢量控制,当电机稳定运行后,用设计的滑模变结构转子位置和转速观测器代替光电编码器得到的转子位置和转速信号,进行电机控制。

图5 实验平台Fig.5 Experimental platform
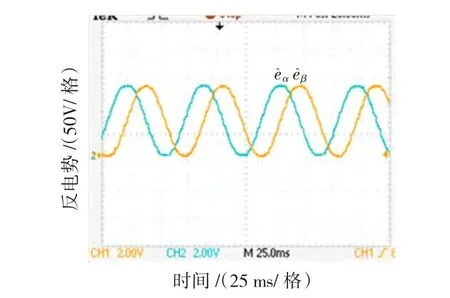
图6 用扩展卡尔曼滤波器提取的反电势Fig.6 Extended Kalman filter was used to extract the back EMF
图6是用扩展卡尔曼滤波器提取的反电势。图7分别为500 r/min、750 r/min和975 r/min时候估算的转子位置角和实际的转子位置角波形,图7(a)和图7(b)为转速为500 r/min时原传统的和新型滑模观测器得到的实际转子位置角和估算角度,通过对比可以看出新型滑模观测器获得的转子位置角静态误差小,从图7(b)、(c)、(d)3种速度下新型滑模观测器得到的转子位置角的实际角度和估算角度可以看出,估算的转子位置角基本和实际的转子位置角一致,证明了新型滑模观测器的正确性。图8为转速从500 r/min加速到750 r/min再加速到975 r/min然后开始减速到750 r/min再减速到500 r/min时实际转速和估算转速波形,由实验结果可知设计的滑模变结构转子位置和转速观测器能够准确的实现转子转速的准确估算。图9为采用无差拍控制dq轴系电流,图9(a)和图9(b)可以看出电流反馈能够较好地跟踪电流给定值,证明了采用的无差拍电流控制策略的可行性和正确性,图9(b)无差拍控制电流iq给定和反馈和图9(c)传统PI控制电流iq给定和反馈进行对比,无差拍控制电流的相应时间是传统PI控制响应时间的1/3左右,超调是传统PI控制超调的2/3左右。

图7 实际转子位置角和估算转子位置角Fig.7 Experimental results about real rotor position angle and estimated rotor position angle

图8 实际转速和估算转速Fig.8 Experimental results about real rotor speed and estimated rotor speed

图9 dq轴系电流Fig.9 dq axis current
5 结论
本文设计了一个新型永磁同步电机滑模变结构转子位置角、转速观测器和无差拍电流控制器。新型的滑模观测器与传统滑模变结构观测器相比,采用sigmiod函数可以在一定程度上减小抖振,用设计的扩展卡尔曼滤波器来提取反电势,进而求解转子位置角,可以省略传统滑模观测器的相位补偿技术并且减小辨识误差。设计的锁相环进行转速提取,可以解决由转子位置角进行微分计算转速的扰动问题。采用无差拍控制策略完成电流内环的预测电流控制,有较好的动态响应。
[1] KANG Jinsong,ZENG Xiangyun,WU Ying,et al.Study of position sensorless control of PMSM based on MRAS[C]//2009 IEEE International Conference on Industrial Technology,February 10 -13,2009,Gippsland,Australia.2009:1 -4.
[2] GU Shanmao,HE Fengyou,ZHANG Hui.Study on extend Kalman filter at low speed in sensorless PMSM drives[C]//2009 International Conference on Electronic Computer Technology,February 20-22,2009,Macau,China.2009:311 -316.
[3] IDE K,TAKAKI M,MORIMOTO S,et al.Saliency-based sensorless drive of adequate designed 1PM motor for robot vehicle application[C]//2007 Power Conversion Conference,April 2 - 5,2007,Nagoya,Japan.2007:1126 -1133.
[4] NAKASHIMA S,INAGAKI Y,MIKI I.Sensorless initial rotor position estimation of surface permanent-magnet synchronous motor[J].IEEE Transactions on Industry Applications,2000,36(6):1598-1603.
[5] CORLEY M J,LORENZ R D.Rotor position and velocity estimationfor a salient pole permanent magnet synchronous machine at standstill and high speeds[J].IEEE Transactions on Industry Applications,1998,34(4):784 -789.
[6] ELMAS C,USTUN O.A hybrid controller for the speed control of a permanent magnet synchronous motor drive[J].Control Engineering Practice,2008,16(3):260-270.
[7] Morel F,Xuefang Lin-Shi,Retif J M,et al.A comparative study of predictive current control schemes for apermanent magnet synchronous machine drive[J].IEEE Transactions on Industry Electronics,2009,56(7):2715 -2728.
[8] 牛里,杨明,刘可述,等.永磁同步电机电流预测控制算法[J].中国电机工程学报,2012,32(6):131 -137.
NIU Li,YANG Ming,LIU Keshu,et al.A predictive current control scheme for permanent magnet synchronous motors[J].Proceedings of the CSEE,2012,32(6):131 -137.
