竖笛演奏机器人的设计研究
2014-07-02张涵雷艳梅沈孝芹
张涵,雷艳梅,沈孝芹
(1.山东建筑大学机电工程学院,山东济南250101;2.山东建筑大学山东省高校机械工程创新技术重点实验室,山东济南250101;3.山东省冶金设计院股份有限公司环保室,山东济南250100)
竖笛演奏机器人的设计研究
张涵1,2,雷艳梅3,沈孝芹1,2
(1.山东建筑大学机电工程学院,山东济南250101;2.山东建筑大学山东省高校机械工程创新技术重点实验室,山东济南250101;3.山东省冶金设计院股份有限公司环保室,山东济南250100)
随着科技的发展和人类生活品质的提高,以器械演奏为代表的娱乐机器人的发展尤为迅速。文章应用电磁铁组件、电磁比例阀、竖笛等器件,设计了竖笛演奏机器人的机械结构;编制计算机上位机软件,对乐曲的简谱进行输入并解码、编码,生成下位机可以识别、执行的代码;以ARM微处理器为控制核心实现竖笛演奏机器人的气流气压与流量以及手指配合运动的控制。通过调试,竖笛机器人实现了吹奏基本乐曲的功能。并对调试过程中存在的问题以及进一步的研究方向进行了讨论。
竖笛机器人;机械设计;控制设计;电磁比例阀
0 引言
伴随着机械设计、机械加工、计算机技术、传感器技术、控制理论与技术的发展以及人类生活品质的提高,机器人的研究与应用不再局限于传统的工业控制、航空航天、海洋探测等领域,以家庭服务、教育、娱乐为主要功能的机器人越来越普遍地深入到人类生活的各个领域,以器械演奏为代表的娱乐机器人研究、开发与应用的发展尤为迅速[1]。Jorge等长期致力于长笛演奏机器人的研究,在长笛演奏机器人的人形机构、仿人机械手、仿人面部表情、气流控制等方面进行了深入的研究并取得了一定量的成果[2-4]。汪烨等利用PLC和定位模块控制步进电机实现了木琴演奏机械手移槌、击槌动作的控制[1]。罗建国等应用硬质铝合金材料研制了单关节3手指仿人竖笛演奏机器人手,实现了高、中、低音及其长短音的调节[5]。郭剑鹰等在吹笛机器人的系统设计和网络控制方面进行了研究[6-7]。韩新斌等对于舵机在打击琴键音乐机器人方面的应用进行了研究,并做出了具有娱乐和科教功能的实物[8]。梁善林基于数据手套和计算机视觉系统,利用虚拟现实技术,研究了虚拟手根据数据手套的手势移动和指令动作进行虚拟钢琴的演奏[9]。谭福生等研究了由中阮、扬琴和葫芦丝演奏机器人组成的民族乐队,该机器人能够仿人面部表情,可以实现多种面部表情表演,并在2010年上海世博会上成功展示[10]。许建平等应用语音芯片进行语音识别,通过语音控制高速电机和高速数字舵机,实现了对琴键弹奏机械手指的控制[11]。孙选等在气动电子琴弹奏机器人的控制信号编码方面进行了研究,在分析数字音乐数据存储结构特点后,实现了对数字音乐进行解码、编码并最终完成对气路的控制[12]。吴兵等研究了数控技术在电子琴演奏机器人方面的应用,把电子琴机器人的运动轨迹利用数控编程进行编制,然后完成电机的控制,实现了数控技术在艺术领域的应用[13]。大多数乐器的演奏无非是通过人的手、口、脚的单独动作抑或是手、口、脚的不同组合动作实现的[1]。竖笛就是通过演奏者的嘴和手结合进行演奏的。对竖笛演奏机器人进行了机械结构以及控制设计,以实现机械手的自动演奏。
1 竖笛机器人的机械设计
竖笛机器人主要由气动竖笛、电磁铁组件、电磁比例阀、底板、竖笛压板、柔性胶皮接口、电磁铁安装板、铜柱组成;使竖笛的六个音洞垂直朝上,利用两块竖笛压板通过螺钉安装在底板上;安装有电磁铁组件的安装板安装在竖笛的六个音洞的正上方,应用四根铜柱把电磁铁安装板固定在底板上[14]。竖笛机器人的实物如图1所示。安装时,使这些电磁铁的输出轴正对着竖笛的音洞,这六个电磁铁的输出轴用来模仿人的手指,实现对竖笛六个音洞开闭状态的控制。电磁铁输出轴的底端附着有海绵胶和乳胶皮的密封层,以保证音洞的密封性能。电磁比例阀就像人的口腔一样实现对输出给竖笛气流强度的控制。竖笛的进气口安装有一个柔性胶皮接口用来模仿人的嘴唇输出气流,应用气管连接电磁比例阀的输出口与柔性胶皮接口,应用气管连接气泵的出气口和电磁比例阀的进气口,气泵就像人的肺。由ARM芯片STM32为核心的控制板控制电磁比例阀的开合程度实现对进入竖笛空气的气流强度的控制,并同时根据乐谱的节奏通过电磁铁实现六个音洞的开闭,从而使竖笛机器人协调工作,按照乐谱吹奏出音乐。

图1 竖笛演奏机器人实物图
竖笛机器人的机械结构中电磁铁的固定是通过短支梁来固定在横梁支撑板上的。在高度方向上则由立柱支撑横梁支撑板实现。竖笛是通过两个定位块固定在底板上。手指的前后、左右间距和高度都是可调节的,这样,可以更好的适应竖笛的位置,便于安装,减少在安装过程中的误差。避免电磁铁输出轴在动作时产生缝隙影响演奏效果。竖笛机器人的气体来源是由气泵提供的,气体来源稳定、可靠,可以为竖笛提供稳定的气体来源。
2 竖笛机器人的控制系统设计
竖笛机器人的控制,主要以ARM芯片STM32为核心的控制系统,通过按键进行人机交互,向微控制器发送指令,实现机器人吹奏和停止以及歌曲的更换。微控制器根据检测到的按键信息,和上位机进行通信运行相应歌曲的程序,通过电磁继电器的闭合实现对电磁铁的控制,以及对电磁比例阀的控制实现对吹奏过程中气流的调节,从而实现了不同歌曲的吹奏。竖笛机器人的控制主要包括气流大小的控制和指法的控制两部分。
竖笛机器人演奏过程中气流、气压只是微弱的变化,因而对于气流气压的变化控制要求比较高。气流控制采用SMC公司的ITV2000-*2型电磁比例阀。它的调节范围大、使用可靠、便于控制、抗干扰能力强。电磁比例阀是通过电流信号控制。电流信号的优点是在传输过程中抗干扰的能力强,因此可以采用电流信号。ITV2000-*2型电磁比例阀是利用4~20 mA的电流来控制的,成线性关系输出0.005~0.5 MPa的压力。控制系统利用ARM输出数字信号,数字信号由D/A转换器转换成电流信号,然后用集成运算放大器对信号进行放大。放大后的信号经过恒流电路转换为恒定的4~20 mA之间的电流信号。输出的电流信号输入到电磁比例阀的信号端,从而实现对电磁比例阀的比例控制[15]。
利用电磁铁模仿人的手指是考虑到了电磁铁有控制方便、动作灵活、成本低、运行平稳等特点。电磁铁的控制采用PCJ-105D3MH继电器,此继电器工作可靠,性能稳定,动作灵活,且成本较低,吸和电流较小适用于弱电控制场合。通过继电器控制电磁铁的吸和,来模仿手指动作的功能。
3 竖笛机器人的软件设计与调试
竖笛机器人的上位机软件功能包括乐曲简谱的输入、乐谱的解码以及编码、编码的传输、上下位机信息的交换等。
3.1 乐谱的输入
对于通用的乐曲简谱直接识别并加以区分相对来说比较复杂。建立一种简单的码制,把简谱的节拍、音量、音符等信息以十六进制的格式进行编码。按照规定的码表把乐曲的简谱按照十六进制的格式输入软件,然后由软件再进一步进行识别并编码。以四分之一拍中音和八分之一拍高音为例,具体的编码方式见表1。
3.2 乐谱的解码与编码
在乐曲简谱以约定码制输入的基础上,对输入的码值进行解码。把码值与竖笛机器人的控制信息建立映射关系。把含有节拍、音量、音符等信息的码值转换成下位机控制电磁铁、电磁比例阀的包括指法控制、比例阀控制、比例阀与电磁铁的时长控制等控制信息。对于各个音量上的每个音符的比例阀控制码是通过多次实验比较进行设定的。以四分之一拍中音音节为例,指法编码、电磁比例阀控制编码以及时长编码见表2。
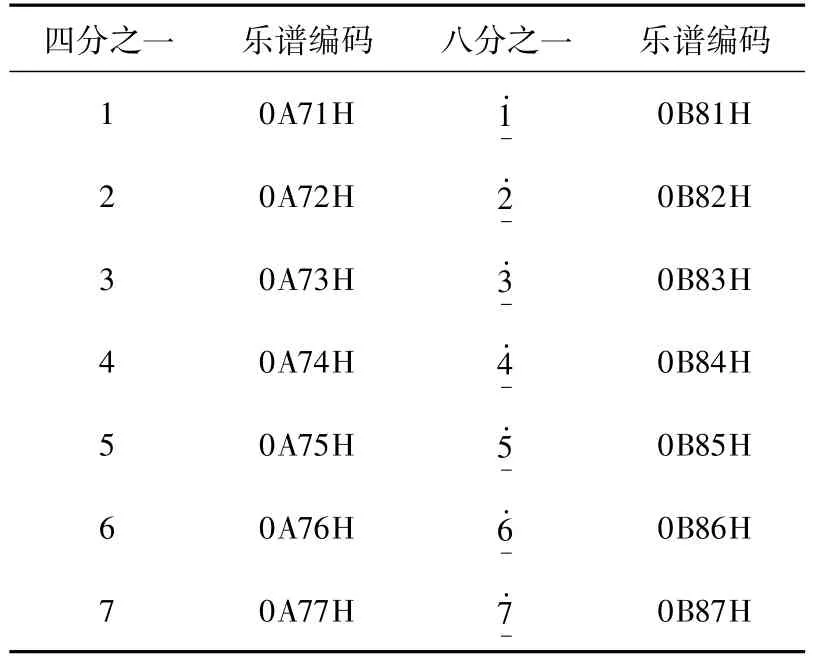
表1 乐谱的输入编码

表2 控制编码
3.3 软件调试
上位机通过USB与下位机进行通信。上位机接收到下位机的按键信息后,把相应乐曲简谱编码后的码值传输给下位机,然后下位机进行执行。通过对多个不同乐曲的多次实验发现,竖笛演奏机器人能够完成基本乐曲的演奏,并且演奏的声音具有较高的区分度。在演奏节奏变化比较缓和的乐曲时,竖笛机器人的表现更好;在演奏节奏变化比较突兀的乐曲时,演奏的声音相对来说变化没有那么柔和。
4 结语
文章介绍了竖笛演奏机器人的机械以及控制部分的设计。初步实现了竖笛演奏机器人的演奏功能。但在调试过程中发现对于电磁比例阀的气流气压和气流流量的控制还需要进一步的研究;在音节变换和节奏变化上的控制,还需要从硬件和软件两个方面进一步优化。
在今后的研究中,还应该继续进行乐谱标准化输入以及图谱的智能识别技术,使机器人系统具有更强的交互性,机器人能够根据输入的乐曲简谱自动调节系统参数,并通过遥控器或上位机进行对系统进行控制,使演奏效果更好。还可以进一步研究网络控制技术在竖笛演奏机器人中的应用,以及机器人乐队的组建等方面的内容。
[1] 汪烨,王廷军.基于20GM定位模块木琴演奏机械手的研究[J].制造业自动化,2009,31(8):154-156.
[2] Solis J.,Chida K.,Suefuji K.,et al.Improvements of the sound perception processing of the Anthropomorphic Flutist Robot(WF -4R)to effectively interact with humans[C].IEEE: International Workshop on Robots and Human Interactive Communication,2005.
[3] Klaus P.,Jorge S.,Koichi T.,Development of the Waseda Flutist Robot No.4 Refined IV:Implementation of a Real-Time Interaction System with Human Partners[C].Proceedings of the 2nd Biennial IEEE/RAS-EMBS International Conference on Biomedical Robotics and Biomechatronics,Nevada:Professional Books Group,2008.
[4] Klaus P.,Jorge S.,Atsuo T.Development of a Aural Real-Time Rhythmical and Harmonic Tracking to Enable the Musical Interaction with the Waseda Flutist Robot[C].The 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems,New York:RandomHouse,2009.
[5] 罗建国,何茂艳,薛钟宵,等.仿人竖笛演奏机器人手设计[J].机械设计,2009,26(6):29-31.
[6] 郭剑鹰,盛鑫军,吕恬生.吹笛机器人系统设计[J].机器人技术与应用,2001(6):19-24.
[7] 郭剑鹰,吕恬生.基于网络的吹笛机器人控制[J].机械与电子,2003,(3):37-40.
[8] 韩新斌,王晨升.一种打击琴键音乐机器人的设计与实现[J].软件,2013,34(1):1-3.
[9] 梁善林.一种基于视觉手势识别的虚拟演奏[D].北方工业大学,2007.
[10]谭福生,杨军,黄建民,等.具有面部表情的仿人型机器人民族乐队[J].上海电气技术,2010,3(3):1-5.
[11]许建平,方健.基于语音控制的弹奏机器人系统设计与实现[J].产业与科技论坛,2011,10(24):91-93.
[12]孙选,李国平,王娜,等.基于微机控制的气动弹琴系统设计[J].液压与气动,2007(8):20-23.
[13]吴兵,吴翠茹,王振坤,等.基于数控技术的电子琴演奏机械手研究[J].装备制造技术,2010(2):6-7,23.
[14]于复生.一种吹箫机器人[P].中国专利:CN200620010100.3,2009-09-19.
[15]秦海港,苏杭,于复生,等.基于STC89C51的电磁比例阀控制系统的设计[J].山东建筑大学学报,2008,23(3):270-272.
(责任编辑:李雪蕾)
Design of clarinet robot
Zhang Han1,2,Lei Yanmei3,Shen Xiaoqin1,2
(1.School of Mechanical and Electronic Engineering,Shandong Jianzhu University,Jinan 250101,China;2.Key Laboratory of Mechanical Engineering&Innovation Technology in Universities of Shandong,Jinan 250101,China;3.Environmental Protection Department,Shandong Province Metallurgical Engineering Co.,Ltd.,Jinan 250100,China)
With the development of science and technology and the improvement of human life quality,developmentof entertainment robotwith the instruments playing as the representative becomes more quickly.The mechanical structure of the clarinet robot was designed with electromagnet,proportional solenoid valve,clarinet and so on.The software in computer,with the function of encoding and decoding formusical score,was programmed.The control of air pressure and flow and the control of the robot's finger movement were finished through the control unit cored with ARM microprocessor.The basic music playing function was achieved by debugging.Finally,the problems emerged in debugging and the next research directionswere discussed.
clarinet robot;mechanical design;control design;proportional solenoid valve
TP242.3
A
1673-7644(2014)06-0574-04
2014-06-06
国家自然科学基金项目(51075245)
张涵(1979-),男,讲师,硕士,主要从事机器人设计与应用、机电测控技术等方面的研究.E-mai:87757285@163.com
