地面三维激光扫描技术在变形监测中的应用
2014-07-02陈弘奕胡晓斌李崇瑞
陈弘奕,胡晓斌,李崇瑞,3
(1.山西省测绘工程院,山西 太原 030002;2.武汉大学测绘学院,湖北 武汉 430079;3.太原理工大学,山西 太原 030024)
地面三维激光扫描技术在变形监测中的应用
陈弘奕1,胡晓斌2,李崇瑞1,3
(1.山西省测绘工程院,山西 太原 030002;2.武汉大学测绘学院,湖北 武汉 430079;3.太原理工大学,山西 太原 030024)
介绍了将地面三维激光扫描仪应用在变形监测中的数据处理流程和数据分析方法,并针对点云数据的特点,提出了点云和点云直接比较、点云生成模型后比较两种变形分析方法;在此基础上,编制了基于激光点云数据的变形分析软件,并设计了两组试验,验证了两种变形分析方法的有效性及激光扫描技术应用于变形监测领域的可行性。
点云;扫描仪;变形监测;地形
一、引 言
我国是世界上遭遇地质灾害影响较严重的国家之一,每年因崩塌、滑坡、泥石流等地质灾害造成的经济损失达数百亿元。因此,如何对重要区域进行有效的灾害监测具有重要的研究意义。目前,国内外滑坡灾害主要监测方法包括地表变形监测、深部位移监测、力学参数监测、环境影响因素监测等。其中地表形变监测是滑坡监测预警的重要内容和有效手段[1]。传统的地表变形监测手段主要是应用GPS和全站仪对重要点位进行连续观测,然而,这种观测手段的监测点较少,无法对滑坡体进行整体监测,并且在地形复杂区域布设控制点困难,外业工作量大,成果获取周期长,大大影响监测效率。随着地面三维激光扫描仪的出现,利用高精度、高密度点云数据进行地表形变监测成为一种很好的途径。
近年来国外学者已经对地面三维激光扫描仪在变形测量中的应用作了一系列研究。如文献[2]研究了利用DEM数据与地面三维激光点云数据进行比较来分析变形信息。文献[3]利用3D多项式曲面拟合地面激光扫描点云数据对大坝的结构进行检测。文献[1]将扫描场景数据分割成相对独立的数据块,利用最小二乘的方法对每个数据进行曲面拟合,然后计算每个独立曲面在不同时期探测到的变形量,对得到的变形信息进行统计分析。本文在深入了解国内外学者研究的基础上,详细研究了地面激光扫描仪在变形监测应用中的扫描仪选择、数据处理以及变形分析方法,并通过试验验证了地面激光扫描技术应用于变形监测领域的可行性。
二、三维激光测量技术
1.地面三维激光扫描仪的选择
地面三维激光测量因其能够快速、高效地获取高精度、高密度的监测对象点云数据,大大提高了作业效率,近年来发展迅速,且被广泛应用于各行各业中。目前,Riegl、Trimble、Leica等主要仪器生产厂商提供的仪器型号众多,不同型号的仪器性能参数差异较大,因此,根据扫描需求选择合适的扫描仪型号尤为重要。对于滑坡体的变形监测应用来说,一般测量范围较大,需要选择测程较长的扫描仪,本研究选用了Riegl公司VZ-4000扫描仪,该扫描仪的最大有效扫描距离可达 4000 m,150 m测量精度15 mm,重复测量精度10 mm,水平扫描范围360°,垂直扫描范围60°,扫描速度每秒30 000点,能够满足一般变形监测的需求。
2.点云数据拼接与坐标转换
地面三维激光仪扫描获取的点云数据是在以测站为中心的局部坐标系下,在不同测站获取的点云数据坐标系并不统一。如果在扫描过程中布设了多个测站,就需要对多站扫描的数据进行拼接,统一到同一坐标系下。同时,变形监测是对获取的多期点云进行比较分析,因此,各期的扫描数据也必须统一到同一坐标系下。目前有两种常用方法来实现坐标系的统一:①先将多个测站的数据配准,然后测得3个以上标靶的大地坐标,将配准后的点云数据直接转换到大地坐标系下;②对每一测站分别布设3个以上的标靶并测得标靶的大地坐标,将每一测站数据都直接转换到大地坐标系下。考虑到变形监测范围较大,布设标靶要满足每个测站都能观测到比较困难,因此本研究采用第二种方法,即在每一测站的布设3个以上的标靶,直接进行大地坐标转换[1]。
3.点云数据的滤波
在实际测量过程中,由于测量设备、测量环境、表面光洁度、表面涂层对光线的反射率以及人为操作等因素的影响,都会不可避免地引入不合理的测量数据(即噪声),而这些噪声点对点云的数据处理有很大的影响,为了保证监测的准确性,必须对原始数据进行去噪滤波处理。点云噪声滤波主要是根据点云的局部属性,以点云局部的法向量变化、K邻域数目以及点到局部拟合曲面的距离等约束属性来判断某点是否属于孤立噪声或随机噪声,然后采用对应的滤波方法进行滤波处理。对于孤立点噪声,由于其一般具有邻域点较少或不存在邻域的特征,因而在孤立点的滤波过程中,可以较为简单地在点云K-D树索引基础之上,通过判断该点一定邻域范围的邻近点个数是否小于判定阈值来判断是否为孤立点。算法说明如下:
1)点云数据构造K-D树,建立点云拓扑关系。
2)求点云中任意一点邻域范围内邻近点个数。
3)判断邻近点个数是否小于判定阈值,若小于则认为该点为噪声点并去除。
4)重复上述步骤,直至点云中所有点都处理完毕。
如图1(a)所示,原始点云数据中存在大量的孤立点噪声,在通过孤立点噪声滤波后,噪声数据基本被剔除,如图1(b)所示。

图1 孤立点噪声滤波
三、变形分析方法
地面三维激光扫描技术实现变形监测就是要通过提取监测对象在不同时相的点云数据加以比较,以获得发生变化的信息并据此加以分析。与GPS或者全站仪测量等传统变形监测方式不同的是,地面三维激光扫描监测并没有明确的变形监测点用于直接计算变形程度,需要通过间接计算提取变形信息,本文研究了两种变形信息提取的方法:点云和点云直接比较、点云所成模型间的比较。
1.点云和点云直接比较
点云和点云的直接比较就是将不同时相同一坐标系下的点云数据直接求差来提取监测对象的变形量。常用的比较方法有平均距离法、Hausdorff距离法、最佳拟合面法。其中平均距离法、Hausdorff距离法受点云质量影响较大,本文采用最佳拟合面法来提取变化信息。最佳拟合面法的具体步骤如下:
1)对两期点云数据进行滤波处理,去除噪声点。
2)为两期点云数据建立索引结构(K-D树、八叉树、格网索引均可),加快查找效率。
3)对于第二期点云数据中的每个点,寻找其在第一期数据中的K邻域。
4)将K个邻域点拟合成平面,并计算待判断点到平面的距离,将距离大于阈值的标识为变化点。
2.点云所生成模型间的比较
模型和模型的比较就是将不同时相下的点云数据分别建立各自的模型,再通过模型求差或模型参数比较的方式来检测出形变并提取相关变形量,对于地形数据来说,可以直接从生成的DEM模型上提取变化信息。基于DEM模型的变形监测步骤如下:
1)对两期点云数据进行滤波处理,去除噪声点和非地形数据。
2)对滤波后的点云数据分别构建DEM模型。
3)统一DEM模型坐标系和精度,以第一期DEM为基准,对第二期DEM进行内插,统一格网点坐标。
4)计算相同格网点的高程变化值来分析变形大小。
四、试验与分析
为了对本文算法进行验证,采用VC++编制了点云数据变形分析软件。该软件具备点云管理、点云渲染、点云漫游、点云选择、点云滤波等基本操作功能,软件界面如图2所示。在此软件平台的基础上,实现了两种变形分析算法,并设计了两组试验以验证算法的有效性。

图2 软件界面
1.试验一
第一组试验模拟了两期数据,第一期扫描数据为墙面,第二期扫描数据在墙面上模拟了3处变形区域。如图3中圆圈位置所示,分别放置了厚度为2 cm的书,3 cm的盒子以及6 mm的笔记本。扫描获得的点云数据如图4所示,这组试验数据采用点云和点云直接比较的分析方法提取变化信息,设置的变化阈值为1.5 cm。

图3 模拟变形场景

图4 扫描点云数据
变化提取结果如图5所示,厚度为2 cm的书,3 cm的盒子能够提取出来,厚度为6 mm的本子无法提取,因为VZ-4000扫描仪的重复扫描精度为1 cm,所以阈值的设置必须大于1 cm,导致变化在1 cm范围内的区域无法有效提取。试验结果表明,变化范围大于扫描仪重复扫描精度的区域能够通过该算法有效检测出来。

图5 变化提取结果
2.试验二
第二组试验采用了不同时期扫描的两组矿坑数据进行变化分析。两期扫描数据间隔2个月,采用点云所成模型间的比较方法从两期点云数据中提取变化信息。两期扫描的点云数据及生成的DEM模型如图6、图7所示。

图6 第一期点云数据及DEM模型
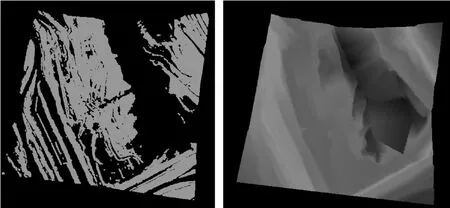
图7 第二期点云数据及DEM模型
在将两期点云数据生成DEM模型并统一坐标系和精度后,直接将相同坐标格网点的高程求差即可得到高程变化值,将高程变化大小按颜色表分层渲染后如图8所示,从图8中可快速判别变形区域和变形程度。

图8 模型对比变化提取结果
在实际的应用过程中,可将两种变形分析方法结合使用,先通过点云所生成模型间比较的方法快速定位变形区域,然后将变形区域的点云数据提取出来,通过点云与点云间的直接比较计算精确的变形量。
五、结束语
地面三维激光扫描技术具有数据获取速度快、精度高,信息丰富等优点。本文主要研究将其应用于变形监测领域的数据处理流程和数据分析方法。研究结果表明,地面三维激光扫描技术应用于变形监测领域是完全可行的,虽然其在测量精度上略低于GPS、全站仪等传统监测手段,但是其对大范围区域快速、连续、全方位监测的优势是其他监测手段所不具备的。地面三维激光技术为变形监测工程提供了一种新的解决方案并具有巨大的发展潜力,随着扫描仪软硬件系统的不断发展,激光扫描技术将会成为一种常规监测手段应用于变形监测之中。
[1] 徐进军,王海城,罗喻真,等.基于三维激光扫描的滑坡变形监测与数据处理[J].岩土力学,2010(7):2188-2191.
[2] BITELLI G,DUBBINI M,ZANUTTA A.Terrestrial Laser Scanning and Digital Photogrammetry Techniques to Monitor Landslides Bodies[J].International Archives of Photogrammetry,Remote Sensing and Spatial Information Sciences,2004,35(Part B5):246-251.
[3] ABELLAN A,JABOYEDOFF M,OPPIKOFER T.Detection of Millimetric Deformation Using a Terrestrial Laser Scanner:Experiment and Application to a Rockfall Event[J].Science,2009(9):365-372.
[4] 刘昌军,赵雨,叶长峰,等.基于三维激光扫描技术的矿山地形快速测量的关键技术研究[J].测绘通报,2012(6):43-46.
[5] 李建辉,王琴.三维激光扫描技术应用于滑坡体地形可视化的研究[J].测绘通报,2012(10):51-53.
[6] 王婷婷.基于三维激光扫描技术的地表变形监测[D].青岛:山东科技大学,2011.
[7] 刘锦程.三维激光扫描技术在滑坡监测中的应用研究[D].西安:长安大学,2012.
Application of Terrestrial 3D Laser Scanning Technology in Deformation Monitoring
CHEN Hongyi,HU Xiaobin,LI Chongrui
P234.5
B
0494-0911(2014)12-0074-04
陈弘奕,胡晓斌,李崇瑞.地面三维激光扫描技术在变形监测中的应用[J].测绘通报,2014(12):74-77.
10.13474/j.cnki.11-2246. 2014.0402
2014-08-31
山西省测绘地理信息科技项目资助(2014-K1)
陈弘奕(1965—),男,山西大同人,高级工程师,主要从事大地测量、航空摄影测量、工程测量和地理信息系统应用与开发工作。
