应用于地面数字电视单频网的时钟锁频技术
2014-07-02王丹丹何大治
蔡 凡,王丹丹,何大治
(1.广州海格通信集团股份有限公司,广东 广州 510663;2.上海交通大学,上海 200240)
应用于地面数字电视单频网的时钟锁频技术
蔡 凡1,王丹丹1,何大治2
(1.广州海格通信集团股份有限公司,广东 广州 510663;2.上海交通大学,上海 200240)
晶振自身的频率老化会使得晶振的输出频率与标称频率具有较大的偏差,晶振频率的稳定度和准确度会影响地面数字电视单频网发射机的性能,导致单频网环境下的动态多径情况,从而影响接收机的接收性能。通过和外部卫星频标的比对,可以在开始阶段对发射器的晶振输出频率进行良好的校准,从而保证单频网环境下各个发射器的一致性,实现各个发射机信号的绝对同步。该方法实现复杂度低,完全可以利用发射机现有的资源实现。
单频网;晶振;老化;校准
传统的地面数字电视覆盖网采用多频网(Multiple Frequency Network,MFN)的方式来增加解决信号覆盖问题,多频网采用对不同地区发射不同的频率信号的方式,由于各个发射点采用不同的频率,相邻传输地区间的干扰很小,但其使用频率资源的效率非常低,需要大量的频率资源。
单频网(Single Frequency Network,SFN)是目前国内外广泛采用的一种组网方式,用来解决地面数字电视信号覆盖问题。单频网是由多个位于不同地点的发射机组成的数字电视覆盖网络[1],在覆盖的区域内,多个处于同步状态的发射机以同一频率发射同一套数字电视节目,即各发射天线发送的信号是完全一样的;接收到的多个发射机信号可以被视为多径信号,接收机通过均衡技术来实现多径之间的相互贡献、相互补偿[2],从而恢复出发送的数字电视节目。
单频网可以实现统一业务采用相同的频率在较大区域内进行覆盖,对频率资源使用的效率很高,但其缺点是会给接收机带来额外的多径信号,且不能为整个覆盖区的某一部分提供额外业务,灵活度不高。
1 SFN建网要求
单频网的建网中要求不同发射点的发射信号必须满足频率同步和比特同步的要求,同时,为了保证来自不同发射点的信号之间的时延在一定的范围内,可以被接收机视为多径信号而加以处理,单频网中不同发射点之间的信号还必须满足时间同步的要求。
1.1 频率同步
为了保证接收机各个发射信号视为多径,单频网中各发射点发射的信号频率应完全相同,这就要求发射机本身有很高的频率精度和稳定度,且各个发射机之间的频率偏差需要控制在一个很小的范围内,实践证明偏差在1~5 Hz内是可以被接受的。为了达到这个要求,各个发射机的振荡器的频率都必须满足一个容差范围,以保证发射信号的频率满足必要的精度。通常采用的方法是各个发射机的振荡器都由同一个参考振荡源来驱动。实际应用中,一般都选用GPS辅助高稳晶振产生的10MHz信号作参考振荡源。
1.2 时间同步
为了使来自不同发射点的信号之间的时延在接收机能够处理的时延范围内,要求各个发射机之间的发射信号能满足绝对时间同步。
在单频网的分配网络中,从适配器到各个激励器之间的网络延时并不相同。为了实现不同发射点之间的时间同步,需要设定一个统一延时,且该统一延时要大于分配网中的最大延时。不同发射点的发射机在收到分配网络中的传输流时,会根据设定的统一延时和绝对参考时钟对传输流进行延时并发射,从而保证了不同发射点信号之间的时间一致性。
实际应用中,一般都选用GPS输出的绝对参考秒脉冲作为各个发射点的绝对参考时钟。
1.3 比特同步
除了满足了时间同步和频率同步,还要求单频网中各发射机发送相同的信号的,这就要求各个发射点之间调制信号帧的数据逐比特对应相同,这就是所谓的比特同步。为保证比特同步,除了保证输入到SFN中各个激励器的码流逐比特对应相同,同时还要求各个激励器对输入码流的分组相同,使得对一个信号帧调制的数据逐比特对应相同。
我国的地面数字电视国标DTMB具有这方面的优势,国标DTMB所有模式在1 s内能满足整数个传输包,不同的激励器只需要满足相同的处理方式并采用基于秒脉冲的系统启动时间就能保证比特同步。
图1的单频网架构采用GPS的秒信号作为绝对时间参考,各个发射机之间以及发射机与单频网适配器之间的时间同步可以利用GPS时间来实现,GPS接收机可以同时提供频率参考(10 MHz)和绝对参考秒脉冲(1 PPS,即1pulse per second)。

图1 单频网架构
图1为采用GPS秒信号作为绝对时钟参考的单频网技术方案,通过配置外部时钟基准,各个发射点可以利用GPS秒信号锁定发射机中的高稳晶体振荡器,从而获得一个短期及长期稳定度都比较优良的时间频率标准,也使得频率准确度得到提升。
2 本振频率偏差带来的影响
通常情况下,单频网发射机中的上变频器与D/A变换器使用同一频率源,因此频率源的输出频率信号的偏差会传递给经过上变频的射频信号,从而使得多普勒频移值的估计误差增大。
设接收机中进入D/A变换器的中频信号的频率为

式中:fVCO为频率源的标称值;ΔfVCO为频率源的标称值与输出信号的实际频率值的误差;fc为载波信号的频率;N为频率源信号的倍频数,以使载波的频率从初始值下变频到预定中频;fd为载波的多普勒频移值。
在载波锁相环中,由于频率源的偏差值未知,则其环路中NCO的本振值为 fc-N×fVCO,因此,当环路跟踪运行后,由环路输出的相位值计算得到的多普勒频率值含有N×ΔfVCO的偏差,造成了多普勒频率估计值的不准确。如果频率源的准确度在10-6量级,那么多普勒频移估计值的偏差将在几赫兹甚至几十赫兹以上。这样在某些涉及计算物体运动速度(比如高速车载系统)的场合中,该多普勒值的偏差会给计算结果带来较大的影响[3]。
频率稳定性是影响系统整体性能的一个重要指标,因为石英晶体具有较稳定的固有频率,单频网发射机通常都采用高精度的石英晶体振荡器。但是,石英晶体振荡器存在频率老化的现象,即振荡器的频率随工作时间的增加而呈现缓慢变化的趋势[4]。虽然老化引起的频率变化的绝对值较小,但在一些精度要求较高的场合,这种变化会导致解调算法性能的下降,尤其是在设备长时间断电以后,开机后频率漂移的值会更加明显。所以,克服高性能石英晶体振荡器频率的老化问题,是保证发射机的射频稳定度是一个关键的问题。
选取两个发射机中的恒温高稳晶振(稳定度标称值为5×10-10/24 h)进行老化测试,测量频率漂移值,其测量方法如下:1)接收GPS的秒脉冲1 PPS信号,利用此秒脉冲与恒温高稳晶振产生的秒脉冲1 PPS信号进行时间比对;2)接着利用FPGA中的时间间隔测量程序对本地秒脉冲信号和GPS秒脉冲信号两者间的时钟间隔进行计数。经过长时间的测量统计从而得到恒温高稳晶振的频率偏移曲线。图2分别给出了1天时间内晶振的测试曲线,其中横轴为测量时间(单位为s),纵轴为本地秒脉冲信号与GPS秒脉冲信号的时间间隔(单位为μs)。从图中可知,晶振在自由运行的情况下,每天的时差会达到8ms左右,这对于高带宽信号的解调而言会增加位同步估算和纠正的频度。

图2 晶振漂移测试结果
3 提升本振频率准确度的方法
3.1 偏差的估算
利用GPS的1 PPS信号,结合时间间隔测量技术,将它与本地晶振的分频信号进行比对,按照相位差的变化速率计算出相对频差,并综合考虑本地晶振的压控灵敏度,产生出对本地晶振的控制电压。经过反复控制,最终实现了本地晶振的长期稳定度和GPS秒信号的稳定度相一致,其原理框图如图3所示。

图3 基于GPS秒脉冲锁定高稳晶振原理框图
时间间隔的测量过程是在FPGA中来完成,时间间隔测量的分辨率由FPGA中能够达到的最高频率的时钟决定,可达到10 ns量级。这样理论上在设备上电后,通过与GPS秒脉冲的比对和晶振的控制,就可以达到1×1011的稳定度和1×10-9的准确度。
3.2 偏差的补偿
在FPGA中通过锁相环来完成对频率偏差的补偿,主要完成以下过程。首先对GPS秒脉冲和本地晶振的秒脉冲进行时差比对,计算得到的时差值进行平均滤波后再进行Kalman滤波,然后输出给DA转换成模拟电压控制晶振。通过监控晶振输出的秒脉冲和GPS秒脉冲的时差值可以了解整个算法的运行过程。大约7 h内的时差测量结果如图4所示。
从图中可看出,跟踪过程分为捕获阶段和稳定阶段。在稳定阶段,晶振的频率不再处于偏移状态,而是被控制为一个固定值,表现为GPS秒脉冲和本地晶振的秒脉冲为固定时延。此时晶振实际输出正弦波的频率值会非常接近晶振的频率标称值(比如10 MHz),误差在0.01 Hz以内。运行过程中时钟的抖动远小于1μs。
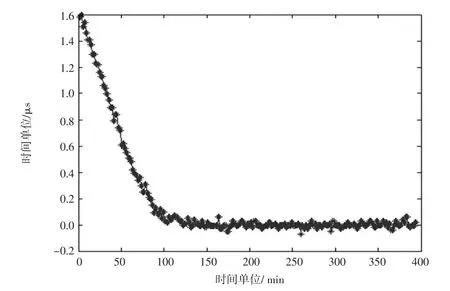
图4 采用Kalman滤波的锁相环跟踪过程
为了提高跟踪阶段的准确度和抗抖动能力,采用基于卡尔曼滤波算法,对时差数据分解为抖动误差、突发误差2个部分,利用Kalman滤波器减小抖动误差,设置跟踪门限值来消除突发误差的干扰,从而提高了晶振的准确度和稳定度指标。
锁相环中的滤波器可以采用平均滤波算法和Kal⁃man滤波算法,但两者对于噪声的处理存在差异。对于突发的抖动,Kalman滤波器会有较好的优势。
由GPS接收机接收到的数据得到一组钟差时间观测序列信息进行状态向量估值。
状态方程为

观测方程为

式中:Xk为状态参数向量;Lk为观测向量;Φ(k,k-1)为状态转移矩阵;Ak为系数矩阵;Wk为模型噪声;ek为观测噪声[5]。
根据卡尔曼滤波算法可知,当在测量序列中出现野值或者突发抖动时,必将影响新息序列的原有性质,导致滤波器估计不准,滤波精度下降。基于卡尔曼滤波器新息序列的特性,这里采用对卡尔曼滤波新息序列进行修正,提高测量的抗抖动能力和去野值能力[6]。如果使用平均滤波,那么突发抖动会导致稳定度的指标会有一定的影响,图5为采用平均滤波算法下的跟踪结果。
从图中可以看出,平均滤波没有办法去除大的抖动。平均滤波就是连续取N次采样值进行平均运算。算术平均值滤波法适用于对具有随机干扰的信号进行滤波。这种信号的特点是有一个平均值,信号在某一数值范围附近上下波动。信号的平滑度和灵敏度取决于N。当N较大时,信号平滑度较高,但灵敏度较低;当N较小时,信号平滑度较低,但灵敏度较高。算术平均值滤波法的缺点是对于测量速度较慢或要求数据计算速度较快的实时控制不适用[7]。

图5 采用平均滤波的锁相环跟踪过程
4 结束语
时间统一的概念已广泛应用于包括导弹、航天、卫星等多个领域,根据不同任务的需要,对时间统一的性能提出了不同的要求。地面数字电视单频网中,由于宽带传输的特点,需要非常精准的绝对时间同步(达到纳秒级别),GPS的时钟源是完全可以用来提供一个参考时钟,来提高设备的时间同步精度。本文研究的基于GPS时间源,其重要特征是具备长期的频率稳定度,利用高准确度的标准秒信号,结合高分辨率的时间间隔测量技术,在较短时间内将发射机内部的晶体振荡器锁定在了标称频率,具备较高的频率准确度和稳定度。该方法的实现复杂度很低,时间间隔测量和Kal⁃man滤波都可以在单频网发射机中的FPGA中完成,因此不会增加设备体积。上述方法简单易实现,既提高了晶振的稳定度和准确度,也间接提升了单频网发射机的性能。
[1]杨延冬,呼和,黄艳萍,等.地面数字电视广播单频网(SFN)组网关键技术与测试方法[J].中国有线电视,2014(8):374-377.
[2] 张立军,归琳,乔艳涛,等.带波束形成的在单频网广播中的信道均衡[J].上海交通大学学报,2004,38(11):1857-1860.
[3]张秀忠,蔡凡,尹燕.采样频率偏移对卫星导航接收机的影响[J].江苏大学学报:自然科学版,2006,27(2):155-159.
[4] 柳丽,陈之纯,曾元峰.石英晶振老化的建模与模型求解[J].上海航天,2004(31):1-6.
[5]陈军,李建文,张成军,等.白噪声Kalman滤波模型在GPS单向授时中的应用[J].海洋测绘,2010(1):29-31.
[6]张向征,乐四海,陶春燕,等.修正Kalman滤波在北斗授时中的应用[J].无线电工程,2012,42(4):56-58.
[7] 田鸣,王瑞清.基于GPS校准的数字式守时钟守时算法研究[J].计算机与数字工程,2011(3):12-16.
Technology on Frequency Lock Applied in Single Frequency Network of Terrestrial Digital TV
CAI Fan1,WANG Dandan1,HE Dazhi2
(1.Guangzhou Haige Communications Group Incorporated Company,Guangzhou 510663,China;2.Shanghai Jiao Tong University,Shanghai 200240,China)
The stability and accuracy of crystal oscillator will affect the demodulation performance of the terrestrial digital television SFN transmitter.With the complex multi-path problem in single frequency network(SFN),the receiving performance of the receiver is affected.Through the comparison with the external satellite frequency standard,crystal oscillator can be calibrated at the beginning stage of the transmitter,so as to ensure each transmitter having the same frequency.The absolute synchronization of all transmitters is realized.The method proposed in this paper can be finished in the transmitter by using the existing device.
SFN;crystal oscillators;frequency aging;calibration
TN965.5
A
�� 雯
2014-08-07
【本文献信息】蔡凡,王丹丹,何大治.应用于地面数字电视单频网的时钟锁频技术[J].电视技术,2014,38(18).
国家自然科学基金项目(11103066)