基于MATLAB的平面四连杆机构的解析设计方法
2014-07-01贝天宝林兴发
贝天宝, 林兴发
(宁波技师学院船舶技术系,浙江宁波315032)
基于MATLAB的平面四连杆机构的解析设计方法
贝天宝, 林兴发
(宁波技师学院船舶技术系,浙江宁波315032)
建立了某平面连杆机构的数学模型,并采用MATLAB来求解四连杆精确位置控制,运算结果和最终的图解验算都能满足设计要求。
四连杆机构;建模;MATLAB
0 引言
四连杆机构由于其结构方便灵活,能够实现多种运动形式而被广泛应用于各个领域,因此对其进行设计方法的研究,特别是根据精确位置来确定连杆机构的各个参数有着更为重要的意义。传统的设计方法主要是用几何图解设计法,这种方法简单直观,但是精度低,而精度较高的综合设计法则需要大量的计算。对此,本文提出利用计算机辅助软件MATLAB来求解四连杆精确位置控制的一种算法。MATLAB是一套功能十分强大的科学计算软件,被广泛应用于机械设计、自动控制等工程领域。其强大的矩阵科学运算能力可以高效求解复杂的工程问题,并可轻松地实现计算结构的可视化效果。
1 机构设计的数学模型
平面连杆机构可以分解成一系列的二杆组,对于四连杆机构也可以分解成两个只含有回转副的铰链二杆组,如图1所示。

图1
根据矢量图的原理,在固定的参考平面内取任意坐标系XOY,作出二杆组的矢量图,并规定各个矢量的正方向(可以任意)。那么当这个二杆组运动的时候,除了R7是定矢量,其他矢量都在发生变化,但是不管P点在任何一个位置,这个矢量四边形都满足矢量法则,即:

其中ψ0表示连架杆R2的初始幅角;ψ1表示R2在第二个位置的幅角;ψi表示R2的第i个位置的幅角;Δψi表示R2在第i个位置相对于初始位置的相对转角;δ0表示R5的初始幅角;δi表示R5在第i个位置的幅角;Δδ表示R5相对于初始位置的相对转角。由上述可知:

将上述矢量方程分别向X轴和Y轴投影,可以得到两个方程式:

消去连架杆R2和R5的初始幅角可以得到如下方程:
其中i=1,2,3…n,由上式可以看出,当多个确定的位置P点定的时候,式中的Pix、Piy和Δδi是已知的。而待求参数是R2、R5、Aox、Aoy和δ0,未知数是5个,至少需要5个方程才能有确定的解,所以此方程最多只能确定5个精确位置。如果是求解少于5个位置的方程,必须有任选的已知参数,下面以要求3个精确位置的连杆机构为例,如图2说明设计方法。必须有两个任选的已知参数,一般可以把两个固定点的坐标作为已知参数。

图2
设计某传输装置,要求将货物从A运送至B点,要求工件顺次通过图中1、2、3计3个位置要求设计一个机构并保持运动要求。已知三个给定位置为:P1(P1x,P1y),相对转角幅角Δψ1=0;P2(P2x,P2y),相对转角Δψ2;P3(P3x,P3y),相对转角Δψ3。在5个未知参数的方程中,已知3个参数不能确定求解,为此,我们可以把定铰链的坐标。Aox、Aoy定为已知入选参数,然后其余3个,即R2、R5和δ0。将以上数据带入式(6)之中并进行已知与未知量的分开,即可得到如下方程:
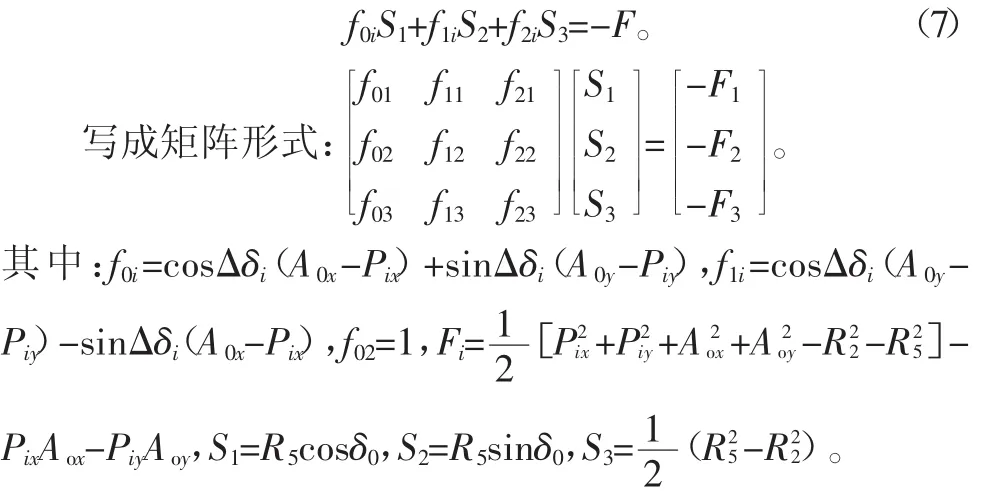
解以上3个方程组即可得到R2、R5和δ0。这只是四连杆机构中的其中两个杆的长度和位置,同理求解另一组二杆组的尺寸和位置,即可得出四连杆机构的所有尺寸,根据需要还可以算出每个杆的坐标位置。由于人工运算工作量巨大,为此提出一种用MATLAB软件来计算的方法。
2 MATLAB求解
根据以上求解思路,可以编写3个位置确定的四连杆机构设计程序,编写程序的过程大体如下:
1)输入3个精确位置坐标和固定铰链的坐标。
2)计算线性方程组(7)的系数f0if1iFi和Si。
3)计算二杆组的带求参数R2、R5和δ0。
4)计算固定铰链和连架杆之间的交点坐标Ai。
按照上述思路,用MATLAB编写的程序如下。其中前期的简单数据读取程序限于篇幅(略),主要对线性方程的解法提供编程如下:


用以上程序求解图2中机构的尺寸,已知图2中的3个位置和初始相位角分别为P1=(20.4,-3),Δδ1=0°,P2=(14.4,8),Δδ2=22°给定两个定铰链的位置为:AO=(0,0),BO=(3.4,-8.3),P2=(3.4,10),Δδ3=68°。
将以上数据带入MATLAB程序,分别得到各个杆组的尺寸和交点坐标如下:
第一个杆组:AO=(0,0)

第二个杆组:BO=(3.4,-8.3)

最后用将以上数据绘制四连杆机构,如图3所示即为我们的设计结果。

图3
3 结 语
从以上的结果可以看出,四连杆的设计除了用图解法之外,解析法的设计,特别是在借助MATLAB的强大的运算能力之后,变得更为方便。从以上的运算结果和最终的图解验算看都能满足要求,但是后续的工作还可以通过MATLAB对机构的速度、加速度进行解析设计和分析。同时,该方法较为直观、形象,对实际具有一定的指导和参考价值。
(编辑黄 荻)
TH 112
A
1002-2333(2014)05-0149-02
贝天宝(1979—),男,硕士,主要从事机电一体化的教学工作。
2014-02-18
