智能膀胱冲洗器控制系统设计
2014-07-01王磊单亚军单佳炜韩雪颂韩良
王磊, 单亚军, 单佳炜, 韩雪颂, 韩良
(东南大学机械系,南京210096)
智能膀胱冲洗器控制系统设计
王磊, 单亚军, 单佳炜, 韩雪颂, 韩良
(东南大学机械系,南京210096)
膀胱冲洗是预防长期留置导尿管患者泌尿系统感染的有效措施之一。传统人工膀胱冲洗技术操作繁琐并且需要全程监护。以传统膀胱冲洗技术为基础,研制了一种智能膀胱冲洗器,设计了智能膀胱冲洗器的控制系统。控制系统以PLC和触摸屏组合为控制核心,通过称重传感器实时监测输液袋重量,控制夹管阀自动切换输液管路。通过该智能膀胱冲洗器可以实现膀胱冲洗自动化。
智能膀胱冲洗器;PLC;触摸屏;称重传感器;夹管阀
0 引言
传统的膀胱冲洗装置采用的是静脉输液器膀胱冲洗法[1]。膀胱冲洗时,首先放出膀胱余尿,常规消毒导尿管,夹闭引流管。选择尿管引流端与球囊端分叉下端为穿刺点,将静脉穿刺针头刺入导尿管,用胶布固定好,以快速输液方法滴入药液进行膀胱冲洗。药液达到所需量时,夹闭输液管调节夹,让冲洗液在膀胱内保留20~30 min,然后开放引流管放出药液。一般要有护士或病人家属监视冲洗液的体积并计时药液在膀胱内的保持时间。这不但操作繁琐,而且因为只能估计输入药液的体积,造成了药液的浪费;更严重的是有时护士和病人家属一时疏忽,忘记及时夹止输液管,导致冲洗药量过多,从膀胱回流至肾脏,引起肾盂肾炎,增加了病人的痛苦。本课题在传统膀胱冲洗技术基础上研制了一种智能膀胱冲洗器,该冲洗器可以实时监测冲洗药液量,自动关闭输液管子,实现膀胱冲洗技术的自动化。
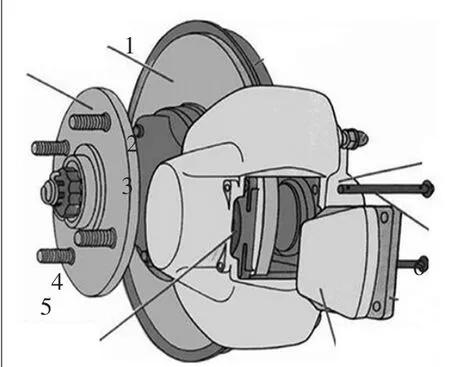
图1 智能膀胱冲洗器
智能膀胱冲洗器(图1)为了测量冲洗药液的用量设置了称重传感器1,2为输液器,5为集尿袋,用自行设计的夹管阀3、4代替传统冲洗装置的输液管调节夹,6为由PLC和触摸屏组成的控制显示单元。膀胱冲洗开始时,首先将输液管和集尿袋分别穿过夹管阀,按图1搭好膀胱冲洗器,然后通过控制显示单元6关闭集尿袋阀4,手动输入冲洗药液量以及冲洗时间,调节冲洗液流速开始冲洗;待达到冲洗量以后输液管阀3自动关闭,当药液在膀胱内达到预设时间以后自动打开集尿袋阀4,废液引流出膀胱至集尿袋5,同时系统发出警报通知医护人员处理后续工作,冲洗完毕。
1 控制系统设计
智能膀胱冲洗器主要通过PLC控制传感器、触摸屏、夹管阀实现自动冲洗如图2。智能膀胱冲洗器的控制方案设计包括控制显示系统设计、传感器系统和执行系统的控制。整个装置通过控制核心PLC收集处理传感器的信息,控制协调夹管动作从而实现膀胱冲洗过程的自动化。这其中控制协调夹管阀动作是控制的主要部分。
1.1 控制系统流程
进行膀胱冲洗时,首先,通过触摸屏将预设的冲洗药液量和冲洗液在膀胱内保持的时间写进PLC,PLC程序将当前已经灌入患者膀胱内的药液量和预设冲洗药液量作实时比较,当灌入患者膀胱内部药液量大于或者等于预设冲洗量时,PLC控制输液管夹管阀关闭,同时开始计时冲洗液在膀胱内的保持时间,达到预设时间以后打开集尿袋夹管阀,放出废液,冲洗过程结束。输液管夹管阀和集尿袋夹管阀内部各有一个霍尔开关,是夹管阀关闭的结束信号和打开的开始信号。夹管阀关闭时直流减速电机正转直到霍尔开关给出信号;只有夹管阀关闭后才能控制其打开,打开时直流减速电机反转1.5 s。智能膀胱冲洗装器的控制流程图如图3所示。
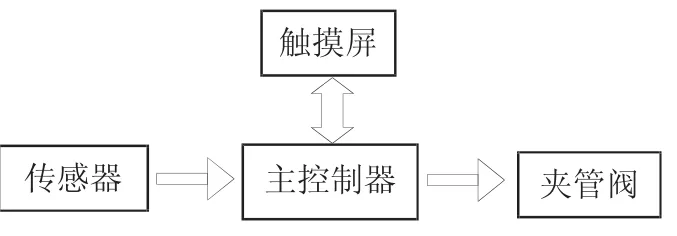
图2 自动膀胱冲洗装置控制原理图
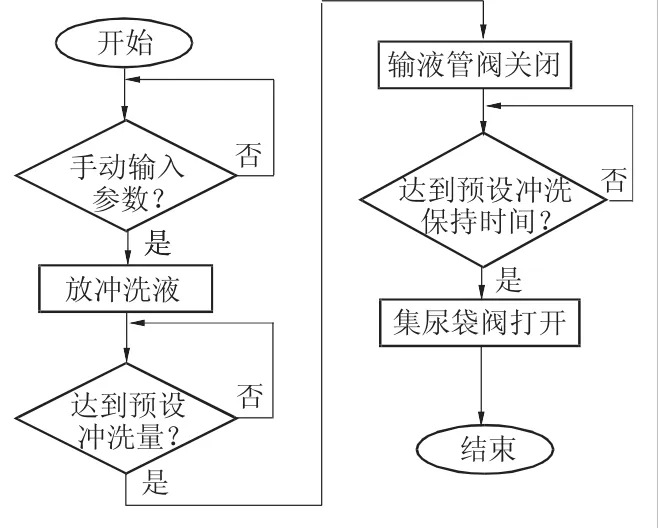
图3 智能膀胱冲洗器控制流程图
1.2 控制显示单元设计
智能膀胱冲洗器采用PLC作为控制CPU保证了系统的稳定性和可靠性,同时PLC和触摸屏组合使用已经成为工业控制的主导形式[4]。PLC的I/O口分配及硬件接线如图4所示。
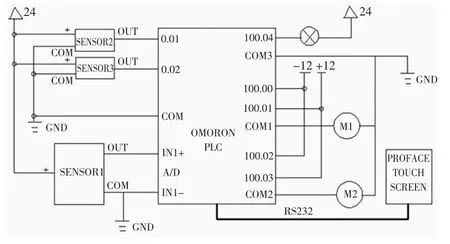
图4 智能膀胱冲洗器硬件连线
其中SENSOR1为拉压传感器;SENSOR2和SENSOR3分别为M1和M2的霍尔开关;M1和M2分别为输液管和集尿袋夹管阀的直流减速电机。
1.3 传感器控制系统设计
1.3.1 称重传感器系统设计
称重传感器实时检测冲洗袋或输液瓶重量,把药液的重量转化成模拟电压信号经过PLC的AD模块处理,内部计算后实时地在触摸屏上显示出来。称重传感器一端悬挂于吊瓶架上,另一端与冲洗袋或冲洗瓶相连。由于冲洗药液一般为500 mL/瓶[2],选用量程为0~5 kg的S型称重传感器,压力信号经过放大器后得到0~5 V的模拟信号。通过多次试验对传感器进行标定后,标定值设定到PLC中。
1.3.2 霍尔开关系统设计
在控制夹管阀动作时需要定位开关来控制阀体动作的范围。考虑到阀体的大小和霍尔开关[3]具有电源电压范围宽、开关速度快、无瞬时抖动、寿命长、体积小、安装方便等优点,我们最终选择了霍尔开关。当霍尔开关的磁钢到传感器的距离到达一定时霍尔开关会由高电势变为低电势,这样就把位置信号转化为电信号方便PLC处理[5]。图5所示为HAL3144E霍尔开关的电路图。

图5 HAL3144E电路图
1.4 夹管阀控制系统设计
夹管阀采用的是直流减速电机带动丝杆螺母机构。根据直流电机的特性,改变电机电源的正负极就可以实现电机的正转和反转,从而实现了阀体的打开和闭合的动作。为防止电路短路,增加了2个继电器实现电机正反转的互锁。减速电机正反转控制原理如图6所示。
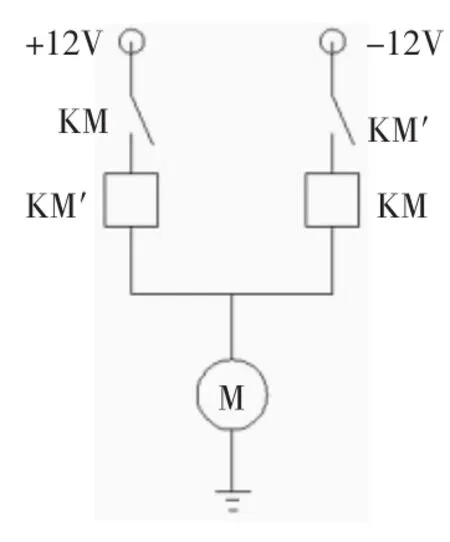
图6 直流减速电机正反转控制
PLC通过控制输出口电压高低来控制电机的正转反转,由霍尔开关的信号控制电机的启停。夹管阀的PLC程序如图7。
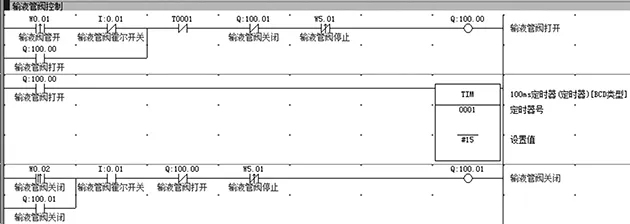
图7 夹管阀控制程序
2 实验系统搭建
实验系统实物搭建如图8所示。输液瓶悬挂于称重传感器下,夹管阀固定在吊瓶架上,输液管穿过夹管阀,将冲洗液引流出来,模拟医院膀胱冲洗过程,手动输入冲洗药液量和冲洗时间,实时观察触摸屏显示的冲洗量变化值和夹管阀动作。

图8 智能膀胱冲洗器实验装置
3 实验结果
通过多次实验证明,所设计的控制系统有效精确地完成了设定的任务,很好地屏蔽了外界的各种干扰。设计的称重传感器系统精确地反映了输液瓶中药液的量,并且通过PLC能把输液瓶中的药量实时显示在触摸屏上。设计的霍尔开关和夹管阀控制系统能及时准确地完成我们所要求的动作,进一步确保了冲洗药量的精确度。
4 结 语
本文在传统膀胱冲洗技术的基础上设计了一种智能膀胱冲洗器,重点阐述了该膀胱冲洗器的控制系统,初步完成了智能膀胱冲洗器的模型。试验结果表明,该智能膀胱冲洗器操作简单,运行可靠,实验效果良好,后面的工作是将其应用于实际临床,根据现在的实验结果可以预计,该智能膀胱冲洗器既能提高医护人员的工作效率,减轻医护人员的工作负担,又能防止因护理不当造成的医疗事故。
[1] 王粤湘.膀胱冲洗的护理进展[J].现代护理,2006,12(25):2387-2388.
[2] 李锐,严彦宏,燕纯叔,等.持续膀胱冲洗方法的临床效果对比研究[J].现代预防医学,2006,33(8):1517-1520.
[3] Hallwee.HAL3144E单极霍尔开关电路[EB/OL].[2011-11-16].http://www.hallwee.com.
[4] 吕品.PLC和触摸屏组合控制系统的应用[J].自动化仪表,2010,31(8):45-47.
[5] 王冬青,谭春.欧姆龙CP1H PLC原理及应用[M].北京:电子工业出版社,2009.
(编辑立 明)
Design of the Control System of the Intelligent Bladder Irrigator
WANG Lei, SHAN Yajun,SHAN Jiawei,HAN Xuesong,HAN Liang
(Department of Mechanical,Southeast University,Nanjing 210096,China)
Bladder irrigation is the one of the effective measures to prevent urinary tract infection in patients with long-term indwelling catheter.The operation of the traditional artificial bladder irrigation is complicated and need constant monitoring.Based on traditional artificial bladder irrigation technology,a kind of intelligent bladder irrigator and its control system are designed.The control system includes PLC and touch screen.By using weighing sensor to monitor the weight of infusion bag in real time,the irrigator control pinch valve can switch the infusion tube automatically.Bladder irrigation can be carried out automatically by using this intelligent bladder irrigator.
intelligent bladder irrigator;PLC;touch screen;weighing sensor;pinch valve
TM 571
A
1002-2333(2014)05-0111-03
王磊(1992—),男,本科学生,研究方向为机械工程及自动化;韩良(1967—),男,副教授,博士生导师,博士学位,从事机电一体化、振动传输、机器视觉等方向的研究。
2014-03-06
东南大学“国家大学生创新性实验计划”(1210286008)