智能双臂式步履挖掘机行走装置设计
2014-07-01赵朝夕
赵朝夕
(哈尔滨工业大学机电工程学院,哈尔滨150001)
智能双臂式步履挖掘机行走装置设计
赵朝夕
(哈尔滨工业大学机电工程学院,哈尔滨150001)
智能双臂式步履挖掘机采用了步履式行走装置,介绍了步履式行走装置的组成,并对行走装置的构件进行了设计计算。
双臂式步履挖掘机;行走装置
1 双臂式步履挖掘机行走装置的选型
液压挖掘机的行走装置分为轮胎式、履带式和步履式。步履式克服了轮胎式挖掘机接地比压大,爬坡能力弱和传统履带式挖掘机不能在复杂地形工作的缺点。利用独立多自由度转向液压支腿进行自由角度调整,补偿地形凸凹高度差,实现在大角度倾斜地形行驶、行走、施工的目的;利用箱型伸缩斗杆挖掘臂与独立多自由度转向液压支腿的配合作业,能攀登翻越数米高的垂直障碍物。
2 双臂式步履挖掘机行走装置的组成

图1 步履式行走装置建模
行走装置由支腿和底架组成,每个支腿都由各自的液压缸操纵,如图1。在回转支承下部连接有专门可实现回转的支撑底架,在该底架的前后端装有支腿。前面2个支腿装1对支爪和直径较小的行走轮,后面2个支腿装1对直径较大的行走轮。本机为两驱机型,后面的大轮为驱动轮,由液压行走马达驱动。行走时轮胎下降至接地状态使底架离地,作业时轮胎上升到转台上部,使底架接触地面并支撑整机。这样可获得较大的接地面积,提高了承载能力和作业稳定性。
3 双臂式步履挖掘机行走装置主要构件的设计
3.1 前支腿的结构设计
前支腿与底架用前支腿铰接支座连接,铰接支座上部装有液压缸,通过液压缸的伸缩可以满足支腿在垂直方向上的运动,铰接支座下部连接前支腿。为了满足挖掘机行走和作业时的灵活性,将前支腿设计为液压缸驱动的伸缩式组合支腿,支腿分为前、后两部分,通过液压缸的伸缩可使其前部在后部的导轨上移动。这种结构形式使用灵活,驾驶员只要根据需要实时地操作伸缩液压缸即可达到调节支腿长度的目的。底架和铰接支座间也装有液压缸,使得前支腿相对于底架摆动,用于转弯行驶,还可使支腿分开或合并使其适应各种复杂的场地,并使其在运输状态时不超过要求的宽度。
步履式挖掘机通过操纵工作装置和回转机构与地面的作用实现挖掘机的前进、后退和左右转向。整机工作性移动时,挖掘机首先伸展动臂和斗杆,使铲斗着地,动臂油缸回缩至前支腿抬起,接着回收斗杆,把轮子拉向前方,完成一步行走。
为了防止在泥土和大角度山地等场地挖掘时支腿沉陷和整机水平移动,提高作业稳定性,使挖掘机作业范围更大,前支腿的前端装有支爪。支爪上部为水平板,下部为放射状的爪,支爪有一定的支撑面积,避免挖掘机工作时支腿过分陷入地面,并能自行清理积土。轮胎和支腿用轮轴连接,轴与轮胎间用2个滚动轴承连接,如图2。
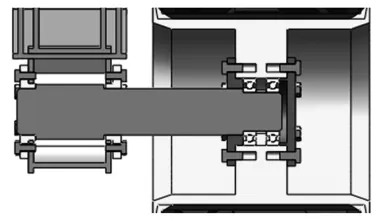
图2 前支腿与轮胎的连接
3.1.1 前支腿轮轴的设计
在行走状态下,前支腿受力分析,如图3。
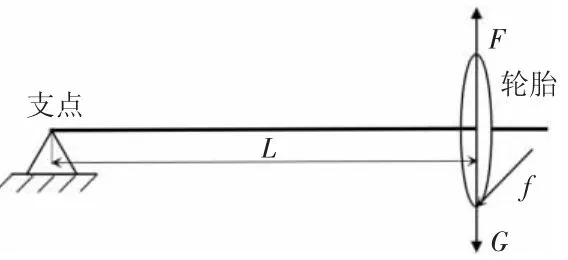
图3 前支腿轮轴受力
根据轴受纯弯曲变形时的强度条件:
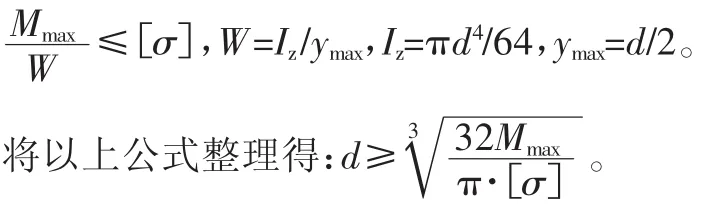
式中:Mmax为轴计算截面上的合成弯矩,kN/mm;W为轴的抗弯截面系数,mm3;Iz为截面对中性轴的惯性矩,轮轴截面是直径为d的圆形,mm4;ymax为轴上的点到中性轴的最远距离,mm;[σ]为许用弯曲应力,参照《机械设计手册》第三卷,取[σ]=320 MPa。
下面计算弯矩。
前支腿轮胎的工作载荷F=G·k/4。
式中:G为整机重,100 kN;k为载荷系数,取1.2。
经计算F=30kN,通过SolidWorks建模,测量得前支腿轮胎重G1=410N,较轮胎所受工作载荷小很多,因此可以忽略不计。则对前支腿对轮轴的支撑点取力矩M=F·L。
式中,L为轮轴支点到轮胎重心的距离,为391 mm。
经计算得Mmax=M=11 730 kN·mm。
将以上数值代入公式求得d≥72 mm,圆整后为d= 75 mm,这个截面为轮轴上的最危险截面,因此最小直径d=75 mm,如图4。
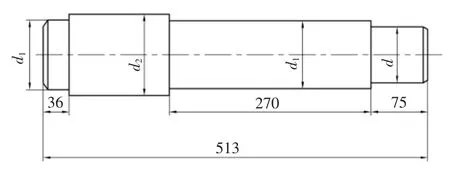
图4 前支腿轮轴的尺寸
轴肩高度h=(0.07~0.1)d。
经计算得d1=90 mm,d2=106 mm。通过SolidWorks建模,确定轮轴各段的长度。初选深沟球轴承6219系列,个数为2个。
3.1.2 前支腿轴承寿命的校核
以小时数表示的轴承基本额定寿命Lh为

式中:C为基本额定动载荷,根据《机械设计手册》,6219系列轴承C=66 kN;P为当量动载荷,假定轴承只承受径向载荷,则P=F/2=15 kN;ω为轮胎角速度,即轴承角速度;v为轮胎线速度,参照同类机型,初定挖掘机的行走速度v=9 km/h,即2.5 m/s;n为轴承转速;r为轮胎半径,r= 410 mm;ε为指数,对于球轴承,ε=3。
经计算,轴承的寿命Lh=25 842 h≈3 a,因此所选轴承满足寿命要求。
3.2 后支腿的结构设计
3.2.1 后支腿的结构
后支腿与底架用后支腿铰接支座联接,铰接支座上部装有液压缸,通过液压缸的伸缩可以满足支腿在垂直方向上的运动,铰接支座下部联接后支腿。为了使运动平稳,因此后支腿采用平行四边形结构。
3.2.2 驱动轮行走马达和减速器的选型
根据挖掘机的牵引力和牵引功率来选择行走马达的型号。挖掘机行驶作业过程中,在底盘行走架上有滚动阻力、坡度阻力、风阻力和加速阻力,这些阻力由切线牵引力克服。由每个驱动轮的牵引功率,计算出行走马达的流量,再计算每个驱动轮的驱动力矩。由于本机液压系统为变量系统,因此参照力士乐变量液压马达A6VE系列样本查得,为变量插装式马达,行走马达的型号为A6VE 28,其相关参数见表1。

表1 变量行走马达的相关参数
参照力士乐行走减速器GFT系列样本,确定减速器型号为GFT 60,传动比为139.9,最大输出扭矩为60 000 kN·mm。
4 结论
对步履式底盘的结构、前后支腿及前支腿轮轴进行了设计,对后驱动轮行走马达进行了选型。最终选择力士乐系列的A6VE 28变量马达和GFT 60行走减速器。
[1] 张质文,王金诺,程文明,等.起重机设计手册[M].2版.北京:中国铁道出版社,2013.
[2] 同济大学.单斗液压挖掘机[M].2版.北京:中国建筑工业出版社,1986.
[3] 机械设计手册编委会.机械设计手册[M].3版.北京:机械工业出版社,2004.
(编辑:启 迪)
TU 621
A
1002-2333(2014)04-0034-02
赵朝夕(1990—),女,硕士研究生,研究方向为机械制造及自动化和特种加工技术。
2014-02-02
