基于量测重构投影的加速度计故障检测*
2014-07-01吴风喜邵珠君吴云华
杨 镜, 华 冰, 吴风喜, 邵珠君, 吴云华
(1.南京航空航天大学 自动化学院,江苏 南京 210016;2.南京航空航天大学 航天学院,江苏 南京 210016)
基于量测重构投影的加速度计故障检测*
杨 镜1, 华 冰2, 吴风喜1, 邵珠君1, 吴云华1
(1.南京航空航天大学 自动化学院,江苏 南京 210016;2.南京航空航天大学 航天学院,江苏 南京 210016)
基于分布式传感器网络结构,构建了双节点故障检测模型,分析加速度计输出,对加速度计的输出量进行重构,将与陀螺输出量耦合部分补偿掉,简化加速度计的奇偶检测方程。最后对检测方程不能识别的3个及以上加速度计出现故障的情况进行讨论,分析表明:基于量测重构的奇偶方程加速度计检测法对分布式传感器网络中的加速计故障检测有较强的检测能力。
传感器网络; 奇偶检测; 量测重构; 加速度计故障检测
0 引 言
分布式传感器网络是由具有相同或不同性能、功能的多个传感器系统组成,各系统分布式地配置在载体的不同空间位置,各节点代表单个传感器系统的位置,由IMU组件和微处理器模块组成,共同构成完全的分布式网络结构[1,2]。分布式传感器网络各节点的IMU组件测量其局部状态,但由于载体的整体结构,各节点的测量和估计信息并不是完全独立的,而是相关的。根据各节点的关系,可以充分利用传感器网络的测量信息,来检测或隔离系统故障等,将大大提高导航系统的性能和故障容错能力。目前已有的故障检测方法很多,但大部分都是针对无线传感器网络提出的,要应用到惯性传感器网络中就需要进行改造,这会增加系统计算时间,降低系统检测效率。也有很多用于惯性传感器网络的故障检测算法[3,4],常见的有广义似然比检测法[5],但广义似然比检测法需要假定条件,需要假定噪声为白噪声,而实际有色噪声的情况很多,从而需要滤波处理,对于分布式惯性网络,节点数目庞大,则导致系统计算时间增加,降低了检测效率。
1 分布式传感器网络故障检测模型设计
1.1 分布式传感器网络双节点结构
常规IMU中,通常将3个单自由度陀螺和单轴加速度计的测量轴沿着机体系的3个测量轴安装[6],其原点与机体系原点相重合,为飞行器质心。
现建立模型,由2组传感器节点构成的分布式系统,其中,一组IMU安装在飞行器质心,其安装坐标系与机体系重合;另一组IMU测量轴不与机体系3个坐标轴重合,其原点也不在飞行器质心。通过角度旋转和位置平移,子节点IMU输出与主节点IMU输出之间的关系如下

(1)

1.2 反馈式双节点故障检测模型
设计的反馈式双节点故障检测网络结构如图1所示。选取参考节点,初始令i=1。所有节点的测量值与主节点的比较后,进行故障检测,排除故障后送入融合中心进行融合,融合后进行融合信息反馈,供下一次融合计算使用,并进行主节点和子节点的故障信息反馈,以供故障隔离。每次仅取其中2个节点的测量值进行比较,即节点2至节点n的测量值分别与参考节点节点1的测量值比较,列出双节点奇偶检测方程,检测出故障节点,并进行故障隔离。若检测到参考节点节点1已失效,则令i=i+1,将第i+1个节点作为参考节点,继续重复上述检测过程。
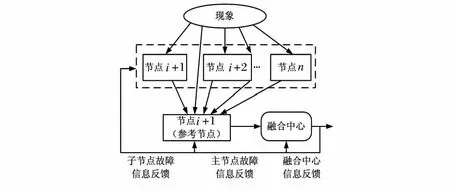
图1 反馈式双节点故障检测网络结构Fig 1 Feedback two-node fault detection network structure
2 基于量测重构投影的加速度计故障检测
在双节点模型中,子节点IMU的安装基座偏离飞行器质心一个距离后,加速度计的输出由于臂杆效应的影响会产生改变,由式(1)可知,子节点加速度计的输出为

(2)
为解决上述困难,现提出加速度计输出补偿的方法,通过重构加速度计测量向量,补偿掉与陀螺测量量的耦合项,从而简化加速度计故障的检测。

所示

(3)
式中 ωp为位于P坐标系上陀螺输出值的微分向量,可由陀螺的测量值得到,rp为子节点坐标系到主节点坐标系中心的距离,ωp为P坐标系的陀螺输出向量。
当子节点陀螺全部正常时,式(3)即可成立,得到加速度计重构向量。但是,当子节点陀螺出现故障后,经过融合中心信息反馈,故障陀螺就会被排除,子节点陀螺输出向量中就缺少了故障陀螺的输出值,加速度计的重构向量就无法得到,如继续用子节点的陀螺输出量,那就加入了故障陀螺测量值,重构的加速度计测量量就不准确。为解决该问题,下面对融合后的角速度重新投影,得到正确可用的子节点陀螺输出。
假设子节点坐标系y轴上的陀螺出现故障,该陀螺在经过陀螺故障检测后就被排除,在故障隔离后其余陀螺的输出量送入融合中心进行融合,将得到载体质心机体坐标系的被测角速度向量ω为
ω=[ωx ωyωz]T.
(4)

(5)

由式(2)和式(3)可以得到理想情况下加速度计6个测量值的线性关系,任选4个测量值就可列出15个奇偶检测方程。但是在实际情况下,存在传感器等误差且无法彻底消除,使得奇偶方程不能满足,故设置动态门限,把所有正常工作时的残差值包含在门限以内,一旦残差超过给定门限,则必然是处于非正常工作状态。
考虑子节点加速度计和陀螺的误差,忽略距离量测值的误差,子节点加速度计的重构量如下

(6)


(7)

由式(2)和式(6)可得主节点和子节点加速度计输出之间的关系,如下式所示

(8)
为表达简洁,主节点加速度计3个测量轴 (x,y,z) 上的误差分别用T1,T2,T3表示,子节点加速度计3个测量轴(x,y,z)上的误差重构量分别用T4,T5,T6表示。
下面采用奇偶方程检测法对加速度计故障进行检测,根据式(8),从主、子节点6只加速度计测量值中任取4个构成奇偶检测方程式,如表1所示,βi(i=1~15)表示加速度计故障检测的门限值,由式(8)求得包含各个测量轴误差的动态门限。如果所有加速度计都正常工作,则所有奇偶检测方程都能满足;如果某加速度计发生故障,则相应的奇偶检测方程就不满足。

表1 双节点加速度计的奇偶检测方案Tab 1 Parity detection scheme of two-node accelerometer
将表1每个奇偶检测方程右边设置一个二进制量Ki(i=1~15),当第i个奇偶检测方程满足时,Ki=0;反之,Ki=1,则根据Ki的值可以建立相应的故障识别的真值表。
如果所有的加速度计工作正常,则K1~K15均为0。若1#加速度计失效,则与1#加速度计的测量值m1有关的奇偶检测方程均不成立,即K1~K10均等于1,而其他与m1无关的奇偶检测方程K11~K15均等于0,从而可将1#加速度计进行故障隔离。其他1只或2只加速度计失效的情况依此类推。
当K1~K15均为1时,说明双节点IMU中有3只及3只以上的加速度计出现故障。此时假设参考节点为节点1,节点2与节点1的测量值进行奇偶方程检测后,出现上述情况,此时,将主节点与下一个子节点即节点3进行奇偶检测,若此时检测结果显示无故障,则说明节点2的测量轴都出现故障,需要故障隔离;若此时节点1与节点3检测结果显示K1~K15均为1,即有大于等于3只的加速度计出现故障,则表明节点1的测量轴都已坏,需要更换参考节点(假设惯性网络中3个节点同时坏了的概率为0)。
3 仿真分析
根据上述研究内容,对双节点结构中的加速度计进行故障检测,以2只加速度计发生故障为例进行验证。限于篇幅,本文仅展示检测结果的真值表和在15个奇偶方程曲线图中任选的2个方程曲线图。仿真结果如图2、图3。

图2 加速度计故障检测奇偶方程3Fig 2 Accelerometer fault detection parity equation 3

图3 加速度计故障检测奇偶方程15Fig 3 Accelerometer fault detection parity equation 15
由图2、图3可知,方程3奇偶方程值未超过动态门限值,方程15奇偶方程值超过了动态门限值。由图4可知,奇偶方程1~2,4~15均不满足,只有奇偶方程3满足,根据故障识别真值可以知道第4只和第5只加速度计出现了故障,需要将其隔离,以保证传感器网络的精度。
4 结 论
本文针对惯性传感器网络提出的奇偶方程检测法,其
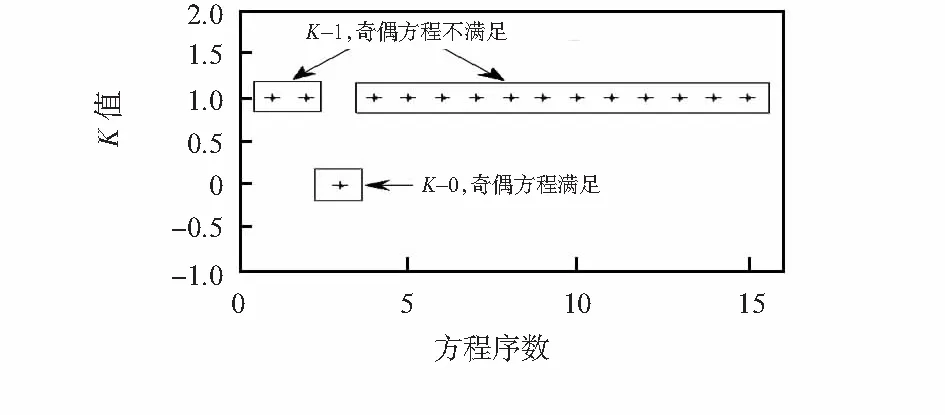
图4 加速度计故障识别真值KFig 4 True value K of accelerometer fault identification
物理概念比较明显,在处理形式上简单很多,在量测过程中不需要增加其他如滤波环节等,若有需要只需在检测前预处理即可,检测过程计算量和计算时间减少。在检测结果上,普通的奇偶方程检测法在形式上都没有能识别3只及3只以上加速度计同时失效的情况,本文提出的双节点检测结构可以通过加入新的子节点或更换参考节点来检测该种情况。
[1] 袁 信,俞济祥,陈 哲.导航系统[M].北京:航空工业出版
社,1993:250-262.
[2] Allerton D J,Jia Huamin.Distributed data fusion algorithms for inertial network systems[J].IET Radar Sonar Navigation,2008,2(1):51-62.
[3] Cordier M O,Dague P,Dumasm,et al.A comparative analysis of AI and control theory approaches to model-based diagnosis[C]∥14th European Control Conference on Artificial Intelligence,ECA2000,2000:136-140.
[4] 贾 鹏,张洪钺. 基于冗余系统惯性组件故障诊断方法的比较研究[J].系统仿真学报,2006,18(2):274-278.
[5] 王秋生,樊久铭,徐敏强.基于解析冗余关系的动态系统故障检测和隔离[J].哈尔滨工业大学学报,2007,39(6):924-927.
[6] 黄 徽,刘建业,李荣冰.微小型MEMS惯性导航系统的六陀螺余度配置实现[J].传感器与微系统,2007,26(7):51-53.
Accelerometer fault detection based on measurement reconstruction and projection*
YANG Jing1, HUA Bing2, WU Feng-xi1, SHAO Zhu-jun1, WU Yun-hua1
(1.College of Automation Engineering,Nanjing University of Aeronautics and Astronautics,Nanjing 210016,China;2.College of Astronautics,Nanjing University of Aeronautics and Astronautics,Nanjing 210016,China)
Based on structure of distributed sensor network,construct two-node fault detection model,and analyze output of accelerometers,the accelerometer output is reconstructed,compensate output coupled with gyro output simplify parity detection equations of accelerometers.Discuss condition when three or more accelerometers are failed which test equation can not identify,analysis indicates that accelerometer parity equation fault detection method based on measurement reconstruction has strong ability of detection on accelerometer fault for distributed sensor networks.
sensor network; parity detection; measurement reconstruction; accelerometer fault detection
10.13873/J.1000—9787(2014)08—0138—03
2014—01—09
国家自然科学基金资助项目(61203188);中央高校基本科研业务费专项资金资助项目(NS2012128) ;中国博士后科学基金资助项目(2013M531352) ;江苏省自然科学基金资助项目(BK2011729)
V 448
A
1000—9787(2014)08—0138—03
杨 镜(1988-),女,江苏南通人,硕士研究生,研究方向为惯性技术与组合导航研究。
