自动跟踪式独立太阳能光伏发电系统的EDA设计
2014-06-28范学超
范学超
(苏州信息职业技术学院,江苏苏州215200)
太阳能的开发利用具有巨大的市场前景,但是,太阳能光伏发电所存在的一个瓶颈问题就是发电效率低,大大限制了光伏发电的应用和发展。解决这一问题的一种比较可行的办法是设计太阳自动跟踪系统,使太阳能发电装置始终面向太阳的方向,以提高光伏发电的效率。本设计以EDA(electronics design automation)技术为依托,在进行系统分析的基础上,对太阳运行规律进行计算,完成了自动跟踪系统的设计。经验证,该系统可以根据太阳运行轨迹的变化,全天候地跟踪太阳,大大提高了发电效率。
1 太阳自动跟踪系统分析
太阳自动跟踪就是根据一天中不同时刻太阳在天空中方位的变化,调整太阳电池板的偏转角度,从而跟踪太阳的运行轨迹,使太阳入射光线垂直照射到太阳电池板上,充分地接收太阳辐射能量。据测定,相同环境条件下,自动跟踪式太阳能光伏发电系统比固定式太阳能光伏发电系统的发电量提高35%左右[1]。因此,太阳自动跟踪技术对提高太阳能的利用率有着重大意义。
目前常用于实现太阳跟踪的方法有两种:一种是光电跟踪,一种是太阳运动轨迹跟踪。光电跟踪是通过使用光敏二极管、光敏电阻、硅光电池等光敏元件,来检测太阳的运动方向,并控制跟踪装置追踪太阳的运行。光电跟踪方法采用闭环控制形式,具有跟踪灵敏度高的基本特点,但这种方法是依靠实时检测太阳光来确定运行过程,极易受到天气和环境中各种散射光线的影响,因此跟踪的稳定性较差,有时甚至会引起误动作。而太阳运动轨迹跟踪是一种开环控制方式,是通过天文学公式计算出太阳运行轨迹的理论值来控制跟踪装置的运动,从而实现对太阳的方位跟踪。太阳运动轨迹跟踪不易受外界环境、气候、杂散光的影响,运行可靠性高于光电跟踪,但是由于自身是开环控制,所以对于由于自身计算过程所致的误差,没有自我修正的能力,从而造成误差持续积累,影响跟踪精度。为了有效地提高跟踪的精确度和有效性,本文将这两种方法结合起来,根据天气的基本状况,设计出一种基于四种环境天气特征的全天候太阳自动跟踪方法。具体设计如下。
(1)白天晴天跟踪模式:白天晴天时,气候条件好,两种跟踪方法都能取得良好的效果,因此,先利用太阳运动轨迹跟踪进行粗跟踪,初步确定出系统的运行方式,而后再利用光电跟踪进行精确跟踪。
(2)白天多云时跟踪模式:在多云的气候条件下,光电设备运行的精确度大大下降。因此,这种情况下只能利用太阳运动轨迹跟踪不受天气、杂散光影响的特点,采用太阳运动轨迹跟踪方式跟踪太阳。
(3)白天阴雨天时跟踪模式:在阴雨天时,太阳的光线较暗,光电设备失效,利用太阳运行轨迹跟踪方法对气候条件进行检测,如果条件尚可,开始跟踪,如果天气条件不好,暂停跟踪,跟踪装置的执行机构保持在当前位置,以减少机械损失;当检测装置检测到天气变化时,再次开始相应的跟踪执行。
(4)夜晚跟踪模式:夜晚时,光伏发电装置停止工作,检测装置处于待命状态,等待天亮启动装置后,依据天气情况决定运行过程。
以上四种跟踪模式采用并行检测,分别执行的基本方式。一次跟踪只采用其中的一种模式,气候条件及设备运行条件输入相应的软件系统,完成详细的运行计算。
2 EDA设计方法介绍
EDA 技术是随着计算机技术的飞速发展应运而生的一种高级、快速、有效的辅助设计手段。它以计算机的硬件和软件为基本工作平台,是集数据库、图形学、图论与拓扑逻辑、计算数学、优化理论等多学科最新成果研制出的计算机辅助设计通用软件包。利用EDA 工具可以代替设计者完成电子系统设计中的大部分工作,是电子设计技术的发展趋势[2]。
传统的数字电路设计大多采用卡诺图化简、小规模TTL设计等方法来进行,这种方式费时费力。而现代EDA 设计方法是伴随着大规模可编程逻辑CPLD/FPGA 的出现而出现的,主要特点是利用了强大的逻辑设计仿真测试技术,以软件来设计硬件,只需通过计算机的设计和计算就能对所设计的电子系统从各种不同的层次进行测试和仿真,极大地提高了大规模系统电子设计的自动化程度。本设计采用了EDA 方法和相应的可编程器件,利用硬件描述语言来完成对系统硬件功能的设计和描述,并在EDA 工具的支持下观测到最后设计结果的运行状态,具有方便和高效的特征。图1 所示为EDA 设计流程图。

图1 EDA设计流程图
3 自动跟踪系统的EDA设计
3.1 自动跟踪系统的整体设计
光伏发电自动跟踪系统在独立性、连续性、高效性和稳定性等方面均有较高的要求。因此,本设计的主要技术指标有:跟踪精度在±3左右;水平运行角度为0°~360°,垂直运行角度为0°~90°;输出交流电压精度为(220±3%) V;输出直流电压精度为(5±1%)V;光伏电源逆变效率为85%。根据以上的设计要求,自动跟踪式独立太阳能光伏发电系统总体流程如图2 所示。
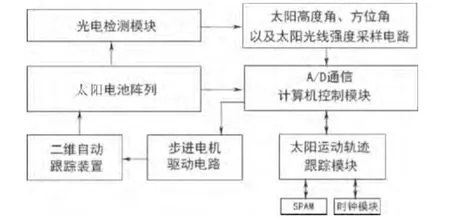
图2 自动跟踪式独立太阳能发电系统的流程框图
如图2 所示,系统以计算机为控制核心,采用光电跟踪和太阳运行轨迹追踪相结合的方式,控制步进电机进行转动,实现对太阳的跟踪。其中,利用光电检测模块检测太阳在天空中的方位以及当前环境中光线的强弱,结合太阳运行轨迹跟踪模块计算出太阳高度角和方位角的理论值,计算机根据相应的结果进行天气判断和光电跟踪,从而驱动执行机构两个步进电机进行运动。步进电机采用二维自动跟踪装置来控制太阳电池板做水平旋转和俯仰运行,以实现对太阳的跟踪。
在整个设计中,利用光强检测传感器进行天气判断和光电跟踪,根据基于地平坐标系的高度角-方位角的天文经验公式,计算出特定时刻、特定地点太阳高度角和方位角的理论值是重点内容。
3.2 光电跟踪设计
光电跟踪利用光强检测传感器来检测太阳入射光强,利用光敏器件在光照条件下输出的光电流信号幅度与光照强度成正比的原理,将光强信号转化为电压信号,计算机对经过A/D 转换的信号进行采样计算,得出信号的均值和波动幅值,然后将两个值与当地天气标准阈值进行比较,以判断当前的天气状况。
3.3 太阳运动轨迹跟踪
太阳运行轨迹的计算需要利用经度及纬度数据,相关的理论公式和天文参数如下。
太阳日角θ 计算方法:
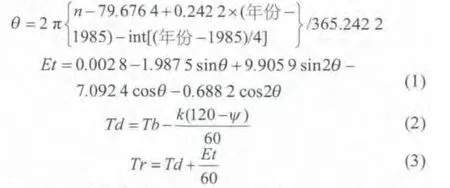
太阳时角ω计算方法取值范围为0~24 h,上午取正值,下午取负值。
计算出太阳高度角h和方位角A,能够确定太阳在天空中的方位:

式中:φ 为当地纬度。
根据以上算法,利用计算机编写太阳高度角和方位角,从而找到太阳运行轨迹的理论值。
3.4 EDA设计
根据以上设计,将计算方法及电路设计方法用Verilog HDL 进行描述,并在MAX+plusⅡ环境下通过编译和仿真验证。将计算出来的数值分别与实际运行系统相对比,可得出运行角度误差在0.1°以内、时间误差在1 min 以内,验证了设计方法的可行性。
4 总结
本文介绍了自动跟踪式独立太阳能光伏发电系统的整体结构设计以及跟踪系统的计算方法,并采用EDA 技术对电路进行了仿真实验,验证了设计结果,缩短了设计周期,具有一定的推广价值。
[1]徐静.自动跟踪式独立太阳能光伏发电系统研究[D].杭州:杭州电子科技大学,2009:7-9.
[2]王维博,吴自恒.用FPGA/CPLD 实现EDA 设计[J].四川工业学院学报,2004(2):6-8.
