基于ALS60的山西省高精度数字高程模型数据处理方法的探讨
2014-06-27王昕宁
王昕宁
(山西省测绘工程院,山西太原 030002)
基于ALS60的山西省高精度数字高程模型数据处理方法的探讨
王昕宁
(山西省测绘工程院,山西太原 030002)
机载LiDAR测量技术可以较低的成本快速获取大范围高精度DEM数据。笔者所在单位采用Leica公司的ALS60系统,快速、高效地获取了山西省高精度、高时空分辨率和全覆盖率的激光点云数据。本文结合生产实际情况,探讨大区域激光点云数据的处理流程及方法,为ALS60系统进行大范围、高精度的数字高程模型生产提供技术借鉴。
ALS60;视准轴;TerraMatch;DEM
一、引 言
机载激光扫描系统(LiDAR)是将现代激光测距技术、GPS定位技术和高精度惯性导航技术集成在一起的软硬件系统,其在获取高精度的数字表面模型(DSM)及数字高程模型(DEM)方面表现出极大的优势。众多科研与技术人员进行了相关研究与实践[1-5],为该技术的理论研究与技术应用奠定了前期基础。为了满足各类不同行业用户及科学研究机构对山西省精密地表数据的需求,笔者所在单位采用ALS60测量系统,对山西省全境范围进行LiDAR测量。经过对激光点云数据处理,进而建立起一个高精度、高时空分辨率、高效率、高覆盖率的全省地面数字高程模型,并将其成果应用于山西省的国土测绘、城市规划、环境监测、防灾减灾、交通建设、电力建设、水利建设、地面沉降测量、工程测量及城市地理信息系统等领域。
二、项目概况
1.项目区概况
山西省位于华北平原西侧的山地黄土高原,省境四周大部为山河环绕,东和东南倚太行山与河北、河南两省接壤,西和西南隔黄河与陕西、河南相望,北以长城与内蒙古自治区相连。全省平面轮廓为由东北斜向西南的平行四边形。全省总面积为15.63万km2,约占全国总面积的1.63%。
2.ALS60系统介绍
Leica公司的 ALS60(配备机载 GPS系统和IMU系统)是一个可搭载在多种航空飞行平台上获取地表反射强度数据的机载激光扫描集成系统(如图1所示)。该系统在飞行过程中同时记录激光的距离强度信息、GPS定位信息和惯性定向信息。ALS60具有多次回波记录功能,每个回波同样有三维坐标记录。

图1 ALS60机载激光扫描系统
3.工作内容介绍
山西省ALS60测量项目共获取15.8万km2的激光点云数据。航飞设计主要指标为:旁向重叠度在20%左右,绝对航高5000~5600 m,获取的激光点云间距3 m,共航摄198个架次。激光点云数据的处理划分了49个区。
三、Terrasolid平台下的数字高程模型的数据处理
1.工艺流程
点云数据处理制作数字高程模型工艺流程如图2所示。

图2 点云数据处理流程
2.关键技术
采用常规的检校场检校的方法处理激光点云数据后,发现数据的精度和提交成果的精度差距甚大。经过大量实践后发现,一个检校场的检校结果完全不能满足检校后连续航飞的大面积测区数据的后处理精度要求,存在航带间高程误差超限、平面位置偏差超限、检查点超限等问题。基于大量的实践验证数据,在对视准轴误差定性及定量分析的基础上,提出了一种无须大量增加检校飞行,直接基于测区激光点云航带数据的每架次航飞数据的视准轴检校方法,即针对测区每航带激光点云数据的视准轴误差改正。利用航摄分区中的纵横交错的航摄区域(如图3所示)所形成的重叠区来量测视准轴误差值,改正每个航飞架次数据的系统误差。
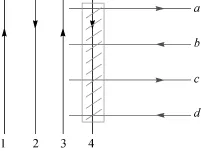
图3 航摄区域重叠区
TerraMatch能当作激光扫描仪校正工具来用或当作一个数据质量改正工具。当把它作为激光扫描仪校正工具用时,它将解决在激光扫描仪和惯性测量装置间未对准问题,最终将偏角、滚角和倾角的改正值应用到全部的数据中。实际的工程数据中可能数据源存在错误,TerraMatch可以解决整个数据的改正或对每条航线单独做改正。
(1)翻滚角(Roll)的视准轴偏差值量测
翻滚角视准轴偏差会导致数据在航线两侧出现一边高一边低的现象。如果一个水平面横切航线,翻滚角引起的偏差时,会和水平面交叉形成一个夹角r,如图4所示。

图4 翻滚角与水平面交叉角示意图
沿着b航线中心线,量取3航线两侧m与n点与b航线的差值h1、h2,求得h=(h1+h2)/2。由此,量测得到翻滚角视准轴偏差值的计算公式
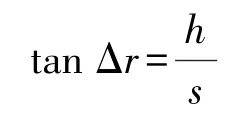
式中,s为中心点到采集点的距离值;h为航线左右两侧差值的平均值。
如果扫描仪的电缆一端指向飞机前部(正向安装),则翻滚角在正方向的转动使得数据顺时针偏转。如果扫描仪的电缆一端指向飞机后部(反向安装),则翻滚角在正方向的转动使得数据逆时针偏转。
(2)俯仰角(Pitch)和旋偏角(Heading)的视准
轴偏差值量测
相邻反向航线重叠部分地物的前后分离错位是俯仰角和旋偏角共同影响造成的。在没有较好校正条件的情况下可以根据3条以上的相邻反向航线地物分离差值进行校正,这种校正方法只能将数据的误差缩小,但不能够精确地消除俯仰角和旋偏角误差的影响,如图5所示。
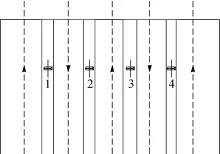
图5 相邻反向航线重叠部分示意图
利用测区内相邻相反航线上屋顶或尖山顶(屋顶或尖山顶应垂直于航线)的分离值得出俯仰角视准轴偏差值计算公式

式中,d为尖顶物的分离值;h为平均航高,如图6所示。
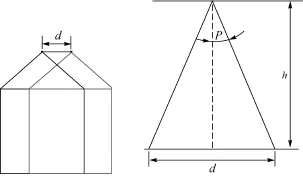
图6 相邻相反航线上屋顶或尖山顶示意图
俯仰角误差在平地上表现不明显。但在测区没有相邻的同向飞行航线时,分别量取相邻相反的3个以上的邻近重叠区的屋顶或较陡的山地的分离值改正俯仰角和旋偏角视准轴偏差值,如图5所示,其中1、3的值相等,2、4的值相等,其中较大的值受俯仰角和旋偏角共同影响造成的相邻航带同一地物的前后分离错位,较小的分离值作为俯仰角改正值,改正俯仰角后将较大的分离值减去较小的分离值作为旋偏角的改正值
式中,l为两条航线中心线间的距离;d为尖顶物的分离值。
旋偏角的正向旋转使数据向左(正向安装)或向右(反向安装)偏移。旋偏角的负向旋转使数据向右(正向安装)或向左(反向安装)偏移。在航线条带中部没有旋偏角的误差影响。旋偏角误差在平面地物上表现不明显。
(3)TerraMatch的平差处理中修正系统误差参数设置
运行TerraMatch的平差处理,对所处理的区域激光点云数据进行整体平差计算,如图7所示。
经过TerraMatch的平差处理后航带间的高程系统误差得到较大优化,3个视准轴检校的残差也进一步得到消除,如图8所示。
在山西省高精度数字高程模型项目中,综合应用了上述两种改正激光点云数据系统差的方法,处理制作了15.8万km2的海量DEM数据。最终DEM成果的自检结果和质检单位的检查结果证明:全省范围的DEM数据精度在平地、丘陵、山地、高山各个地形内的精度完全一致,并远高于技术规范的相关规定。

图7 TerraMatch平差参数设置示意图

图8 TerraMatch平差处理结果示意图
四、数字高程模型成果的高程精度统计
为控制山西省高精度数字高程模型项目的高程精度,全野外布设检查点3269个(以1∶1万图幅为单位),平地一幅图布设一个检查点,丘陵和山地每四幅图布设一个检查点。检查点高程方向上的差值基本呈正态分布(如图9所示)(正值1809个,负值1460个),最大0.66 m,最小-0.78 m,高程中误差为0.15 m,完全符合项目设计中规定的精度指标。

图9 检查点残差正态分布图
五、结束语
利用ALS60激光扫描系统获取大面积的DEM数据,它的后处理过程是一项非常艰巨的工作。本文依据实际的生产处理中所遇到的具体问题的解决方法,提出了针对测区每航带激光点云数据的视准轴误差改正方法和TerraMatch修正高程系统误差及视准轴误差的方法,对LiDAR机载激光扫描系统进行大范围高精度数字高程模型生产具有技术上的参考意义。
[1] 张小红.机载激光雷达测量技术理论与方法[M].武汉:武汉大学出版社,2007.
[2] 余海坤,李鹏,曾庆傲,等.机载LiDAR视准轴误差检校方法研究[J].测绘通报,2012(12):96-97.
[3] 周淑芳,李增元,范文义,等.基于机载激光雷达数据的DEM获取与应用[J].遥感技术与应用,2007,22 (3):356-360.
[4] 张齐勇,岑敏仪,杭芬.基于LiDAR点云数据索引的DEM快速提取[J].测绘科学,2010,35(3):69-73.
[5] 王雪娇,洪友堂.机载 LiDAR技术在快速生产高精度DEM中的应用[J].北京测绘,2011(4):33-46.
An Exploration of ALS60 Based Data-processing Method for Shanxi High-precision Digital Elevation Model Production
WANG Xinning
P231
B
0494-0911(2014)07-0078-04
2014-03-11
王昕宁(1980—),女,蒙古族,辽宁北镇人,工程师,主要从事航测内业数据处理工作。
王昕宁.基于ALS60的山西省高精度数字高程模型数据处理方法的探讨[J].测绘通报,2014(7):78-81.
10.13474/j.cnki.11-2246.2014.0231
