一种新型的便携式交通事故现场快速勘查系统
2014-06-27刘文超胡孟夏李一兵
刘文超,王 岩,胡孟夏,李一兵
(公安部道路交通安全研究中心,北京 100062)
一种新型的便携式交通事故现场快速勘查系统
刘文超,王 岩,胡孟夏,李一兵
(公安部道路交通安全研究中心,北京 100062)
交通事故现场勘查对特征数据采集和重建分析鉴定至关重要。笔者设计构建了一套基于双目立体视觉原理的便携式交通事故现场快速勘查系统,通过对普通定焦数码相机进行预标定的方式实现交通事故现场无标尺勘查取证,现场处理数据输出现场图,测量误差小于1%。系统勘测数据为目标点的三维坐标,可直接用于事故现场的三维重建。该系统工作耗时短,可缓解现场勘查引起的交通拥堵,可实现补测、勘误等二次处理,适用于重特大交通事故现场的勘查取证工作。
无标尺;双目立体视觉;参数标定;交通事故现场
一、引 言
道路交通事故关系到广大人民群众的生命财产安全,在全世界范围内受到广泛关注。交通事故现场勘查作为事故调查分析的重要组成部分,采集取证第一手的数据材料,直接影响事故再现分析与鉴定的精确度和真实性;另一方面,现场勘查作业效率决定了现场封锁时间,进而影响着交通拥堵的可能性和严重程度。
笔者设计并构建了一种基于双目立体视觉原理的便携式无标尺交通事故现场快速勘查系统,采用分步预标定双目普通定焦数码相机内外部参数的方式,无须对交通事故现场进行预处理(摆放标志物或标定物等),即可实现通过双目图像同步采集获取现场目标点三维坐标数据的勘查取证作业,并通过配套开发的现场图绘制软件输出符合国标的交通事故现场图[1]。
二、需求分析与结构设计
1.交通事故现场快速勘查需求特性分析
交通事故现场勘查取证的核心需求是准确高效、轻便简易,要求勘查设备在有限的时间内全面客观准确地采集现场包括人、车、路等事故相关元素的位置、尺寸、距离等数据信息。传统勘查方式以皮尺粉笔为主要工具,依赖作业经验评判勘查元素,勘查结果因人不同差异性明显,且一般不可补测或勘误。边勘边测边记录的作业模式耗时较长,勘查人员劳动强度大,易引发和加剧由于封锁现场导致的交通拥堵。
基于双目立体视觉原理的事故现场勘查是将图像的灰度信号通过耦合装置(CCD)转换为数字信号,应用图像处理、模式识别、人工智能及计算机视觉等方法获取目标元素的世界坐标[2]。勘查工具的设计原则应包括勘测精度高、作业速度快、操作简易携带方便等特性。
2.便携式交通事故现场勘查设备结构设计
便携式交通事故现场快速勘查系统(以下简称勘查系统)包括现场勘查设备和配套的现场图绘制软件两部分。现场勘查设备包含图像采集模块、触发控制模块、集中显示模块和辅助模块,现场图绘制软件能够调用双目现场勘查图像摄影测量的世界坐标数据,用以标注现场图元素的尺寸和位置信息。现场勘查设备的图像采集模块为两部非量测定焦数码相机(RICOH GRD III),相距约80 cm(即基线长度),通过外接快门线和显示屏实现双目拍摄的一键式同步触发和勘查视野的集中显示,集成安装平台和独脚支架用于支撑、转移等辅助功能。图1为现场勘查设备工业样机的实物外观。

图1 现场勘查设备工业样机实物外观
现场勘查设备整备质量(含独脚支架)为2.2 kg,抵达事故现场后只需连接独脚支架、触发外置快门即可启动设备,采集双目勘查图像。由于采用了参数预标定的技术路线[3],无须对事故现场进行预处理(如摆放标志物或标定物等)即可直接勘查取证,全程只需一名勘查人员,在提高工作效率的同时还降低了现场勘查的劳动强度。
3.现场勘查与图像处理工作流程
交通事故现场勘查取证一般以交通事故现场图的形式呈现结果,勘查系统配套开发的现场图绘制软件采用符合国标的符号库[4],通过调用事故现场元素图形符号,标注其尺寸位置数据的形式绘制并输出交通事故现场图。勘查系统的摄影测量模块基于双目图像摄影测量的三维世界坐标数据计算交通事故现场元素的位置尺寸信息,用于现场图的绘制,作为“测”和“绘”的沟通桥梁,是整个勘查系统的核心技术组件[5]。图2为便携式交通事故现场快速勘查系统的工作流程。

图2 便携式交通事故现场快速勘查系统工作流程
三、参数预标定
无标尺现场摄影勘查的技术原理是双目数码相机的参数预标定,具体分为内部参数标定和外部参数标定两部分,又称为“分步标定”[6]。内部参数标定每部相机彼此独立,外部参数标定则需要双目相机安装位置固定后进行,且标定完成后两部相机之间的相对位置不能发生改变。
1.内部参数标定
相机的内部参数标定采用2D棋盘格式标定板,9行13列,共117个标定点,如图3所示。

图3 2D棋盘格式标定板
使用拓普康GTS332S全站仪测量117个标定点的世界坐标,作为内部参数标定的参考数据。使用待标定相机拍摄标定板图像,通过标定程序累积标定结果,一般在图像超过40幅标定结果收敛性良好时认为内部参数标定可靠。图4为相机内部参数的标定结果。

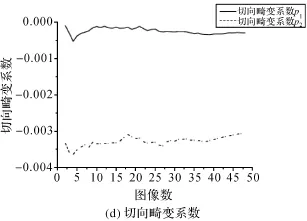
图4 相机内部参数标定结果
理论上,横、纵向有效焦距应近似相等,主点坐标应接近相机分辨率数值的一半,径向和切向畸变系数应呈现出明显的收敛性[7]。
2.外部参数标定
相机的外部参数标定是在双目相机安装完毕、相对位置固定的情况下进行的,且标定后两部相机之间的相对位置不能发生改变。设计构建3D散点式标定场,共30个标定点,如图5所示。

图5 3D散点式标定场
使用拓普康GTS332S全站仪测量30个标定点的世界坐标,作为外部参数标定的参考数据。使用集成固定的勘查设备拍摄标定场图像,通过标定程序标定外部参数并作归一化处理,表1为勘查设备外部参数标定结果。

表1 勘查设备外部参数标定结果
表1中外部参数经过归一化处理后,相当于以左目相机为基准给出右目相机的相对位置[8],具体的,由右目相机外部参数的最后一行(平移向量)可见,两部相机的相对距离约为800 mm,与设计制作的基线长度相符。
3.测量精度验证
设计构建试测目标,如图6所示。

图6 勘查设备试测目标
使用勘查设备拍摄钢板尺和3个直立目标点A、B、D,预先测量目标尺寸信息,与摄影测量结果相对照,计算不同视距和不同方向目标的测量精度(见表2)。

表2 勘查设备试测试验结果
试验表明,勘查设备在10 m范围内的摄影测量精度基本能够保持在1%以内,完全满足交通事故现场勘查的精度要求。
四、模拟现场勘查取证
设计构建模拟交通事故现场,分别使用勘查系统和传统工具进行勘查取证,具体内容见表3。

表3 模拟现场勘查实验设计
试验结果表明见表4,勘查系统在现场勘查取证环节的工作效率明显优于传统工具,现场图绘制用时与传统工具相近,考虑到勘查取证封锁路面可能引发的交通堵塞、摄影测量精度的可控性和标准化、勘查系统可实现事后勘误和补测等功能,可见摄影测量技术在交通事故现场勘查工作中的实用性和优越性。

表4 模拟勘查对比实验结果
五、结束语
基于双目立体视觉原理的近景摄影测量技术,设计构建便携式交通事故现场快速勘查系统,采用参数预标定的技术路线,可实现交通事故现场无标尺快速勘查取证功能。无须对事故现场进行预处理(摆放标志物或标定物等),仅需一人即可完成全部勘查流程,劳动强度低,封闭现场用时短,可有效缓解交通事故现场勘查引发的交通堵塞。摄影测量精度较高,且人为差异性小,可根据双目勘查图像事后对勘查结果进行勘误或补测,图像资料客观真实,可信度高、还原性好,对于重特大交通事故勘查取证和再现分析意义重大。
本文依托国家科技支撑计划(2009BAG13A07),首批工业样机已投入山东、广东等地区的公安交通管理部门示范应用。从应用反馈来看,现场勘查设备对气候、光线、环境场景的适应性仍需进一步完善,摄影测量和现场图绘制软件的界面友好性不够理想,持续改进系统的鲁棒性和简易性是近期工作的改进方向。
[1] 程三伟.摄影测量技术在交通事故现场快速勘查中的应用[D].长春:吉林大学,2004.
[2] 鲁光泉.道路交通事故现场三维摄影测量及标定技术[D].北京:清华大学,2006.
[3] 鲁光泉,李一兵.基于普通数码相机的交通事故摄影测量技术及其研究进展[J].交通运输工程与信息学报,2005,3(3):63-67.
[4] 中华人民共和国公安部.GA 49—2009道路交通事故现场图绘制[S].北京:中国标准出版社,2009.
[5] 李一兵,鲁光泉,赵红蕊,等.基于双目视觉的便携式无标尺交通事故现场快速勘查系统:中国,ZL201120105757.9[P].2011-04-30.
[6] 胡楠,鲁光泉,荔涛,等.基于分步标定法的交通事故现场摄影测量精度实验分析[J].汽车工程,2008,30 (7):557-560,556.
[7] 蔡晓敏.基于摄影测量的事故车辆碰撞变形分析方法研究[D].北京:清华大学,2004.
[8] 刘文超,胡孟夏,王岩,等.基于双目立体视觉的车载式交通事故现场快速勘查系统[J].汽车安全与节能学报,2012,3(3):239-244.
A New Type of Portable Investigation System in Traffic Accident Scenes
LIU Wenchao,WANG Yan,HU Mengxia,LI Yibing
P208
B
0494-0911(2014)07-0117-04
2013-04-15
国家科技支撑计划(2009BAG13A07)
刘文超(1984—),男,辽宁鞍山人,硕士,助理研究员,研究方向为道路交通安全。
刘文超,王岩,胡孟夏,等.一种新型的便携式交通事故现场快速勘查系统[J].测绘通报,2014(7):117-120.
10.13474/j.cnki.11-2246.2014.0241
