北斗二代卫星厘米级相对定位
2014-06-27白征东过静珺
白征东,元 荣,过静珺,王 园,2
(1.清华大学土木工程系地球空间信息研究所,北京 100084;2.96633部队,北京 100096)
北斗二代卫星厘米级相对定位
白征东1,元 荣1,过静珺1,王 园1,2
(1.清华大学土木工程系地球空间信息研究所,北京 100084;2.96633部队,北京 100096)
我国的北斗二代卫星导航定位系统目前已经发射16颗北斗卫星,北斗区域卫星导航系统已建设完成,已经具备我国范围内的初步三维导航定位能力。GPS的相对定位精度在区域范围内可达厘米级,已经广泛应用于测绘、交通等行业,但是北斗系统在相对定位方面的研究还比较少。本文研究北斗高精度相对定位的数据处理方法,通过2012年5月29日的实测数据和处理结果,对10 km左右的基线实现了厘米级精度的北斗卫星高精度相对定位,为北斗二代系统的测试提供了相关试验与结果,同时厘米级的相对定位能力也使得北斗系统能够应用于测绘、交通等行业。
北斗卫星导航系统;相对定位;厘米级
一、引 言
北斗二代卫星导航系统(BeiDou navigation satellite system,BDS)是中国自主设计研发、具有自主知识产权的全球性卫星导航定位系统,是继美国的GPS、俄罗斯的GLONASS之后,国际上具有全球性定位能力的第三个卫星导航系统。BDS于2012年年底实现了覆盖中国境内及周边地区的区域性导航定位能力,为用户提供高质量的定位、导航和授时服务,并具有短报文通信功能[1]。目前 BDS已经建立,且具备我国范围内初步三维定位和导航能力[2]。为了测试和验证目前BDS在高精度相对定位方面的定位精度,本文首先对北斗高精度相对定位的相关知识进行了阐述,然后用清华大学和山东北斗华宸导航技术有限公司联合开发的 BeiDou/ GPS/GLONASS三系统双频高精度接收机,进行了北斗实测数据的采集与高精度处理,最后对测试结果进行了分析总结。试验结果不但验证了本文方法的正确性,也说明目前的北斗二代一期系统已经基本具备高精度的区域相对定位导航能力。
二、相对定位的数学模型
相对定位[3]的目标是确定未知点相对于一个已知点的坐标,也就是确定两点间的矢量,通常称为基线。BDS的相对定位模型与GPS的相对定位模型[4]类似,对于较短长度的基线来说,为了求得精确的相对定位结果,通常采用双差载波相位观测值组合,可以很好地消除钟差、大气折射误差等影响[5],而且双差组合的观测数据量较多,其数据间的相关性比三差组合要好[6],实际中更常用。

假设在A、B两点对卫星j、k同步观测,载波相位观测方程[3]为式中,ϕ为相位观测值;δ为卫星钟差或测站钟差;ρ为卫星与测站的距离;N为整周模糊度;f为载波频率;λ为载波波长。
方程(1)和方程(2)中的两式相减后可得两个单差观测方程,将两个单差方程相减可得到双差观测方程,有
假设卫星j为参考星,可得双差观测方程式的线性化形式[7]

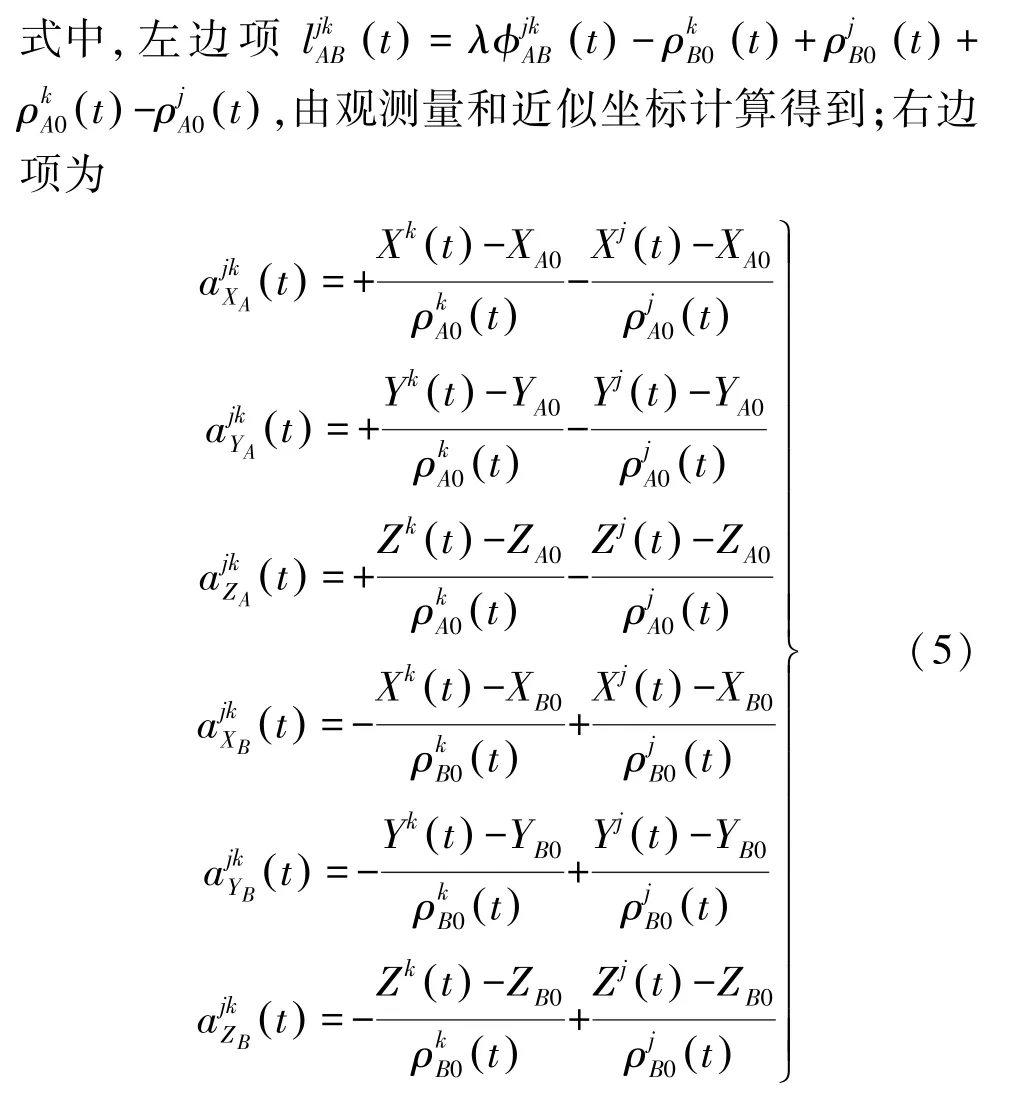
对于相对定位,需要已知参考站的坐标,假设参考站为A点,对应B为流动站点,则有ΔXA=ΔYA=ΔZA=0,可得式(4)的误差方程为

式(6)可用卡尔曼滤波进行估计[8]。
三、相对定位的数据处理
1.周跳探测方法
在解算相对定位方程时,需要先进行周跳的探测,然后才能准确地固定整周模糊度。本文要进行的相对定位采用1 Hz的双频观测数据,而且需要逐历元的分析数据,比较合适的周跳探测方法是伪距相位相减法与电离层残差法的组合来探测周跳值[9-10]。为了验证周跳方法的准确性,分析 IGS站的1 Hz数据文件vtis1800.12o,对第5号卫星的L1载波上的第100到第500历元上手动增加1周的周跳,增加周跳前后的电离层残差分布如图1所示。
从图1(b)可以看出,增加1周的周跳后,电离层残差有很明显的变化,采用电离层残差法能够正常探测出第100和第500历元的周跳变化值,但是电离层残差法只对4周以内的小周跳敏感[11],对于大于7周的周跳值可由伪距相位相减法能够探测出[10],将两种方法结合即可探测任意大小的周跳值。

图1
2.模糊度固定
本文采用LAMBDA方法单历元固定双差的整周模糊度。模糊度初值ΔN0由P码或C/A码计算得出,初始权阵为P(可设为单位阵),设双差因子为D,则双差模糊度的初值和权阵分别[12]为
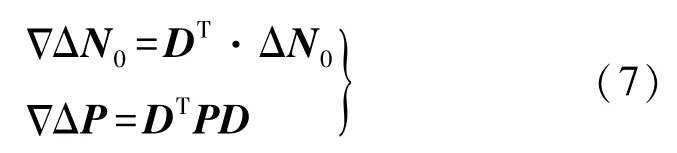
将式(7)中的ΔΔN0和ΔΔP代入LAMBDA中可得到固定的双差整周模糊度值 ΔΔN,再把 ΔΔN代入式(6)中并利用卡尔曼滤波即可估计出流动站B点的坐标改正值。
四、实测结果与分析
1.数据采集
2012年5月29日,采用BeiDou/GPS/GLONASS三系统双频高精度接收机,在清华大学地球空间信息所楼顶的A点和北京市测绘设计研究院楼顶的B点进行了相对定位试验,基线长度为11 413 m,采用双频观测数据,数据采样率为1 Hz,卫星高度截止角为15°,固定模糊度所需的最少历元数为10,卫星星历采用广播星历。
2.数据处理
1)坐标参考值:A点和B点的坐标值采用精密星历和GAMIT软件对周边国际IGS站数据进行静态基线处理,得到两点的准确坐标,作为真值。
2)坐标初值:A点作为参考点,坐标初值即为准确坐标值;B点作为流动站点,坐标初值由单点定位提供。
3)定位结果:准确固定模糊度后,采用卡尔曼滤波方法对北斗进行相对定位的解算,可得到每个历元的北斗高精度相对定位结果,与真值相比即可得到其误差值,如图2、图3所示,统计结果见表1。

图2 北斗相对定位的DOP值分布图

表1 北斗相对定位的误差统计 m
从图2中可以看出,北斗PDOP值在2.5~3.5之间,卫星几何分布良好,有利于定位。从图3的误差分布图及表1的统计结果可以看出,北斗的相对定位结果在N和E方向与真值的偏差在1 mm以内,标准差在3 cm左右;在U方向的误差与真值的偏差在3 cm左右,标准差在3 cm左右。可见对于10 km左右的基线来讲,北斗卫星的相对定位在U方向(高程方向)的误差稍微大一些,但整体上北斗卫星的相对定位结果都在10 cm以内,达到厘米级的精度。
五、结 论
BDS目前已完成中国及周边地区的定位服务建设,通过本文对北斗高精度的相对定位测试,可得出如下结论:
1)BDS已经具备我国范围内的高精度相对定位能力。
2)对于区域定位来说,BDS的PDOP值与GPS相当,能够有效地实现定位功能。
3)对于10 km以内的基线,目前BDS的相对定位精度在3 cm左右,整体结果达到厘米级的精度,能够满足测绘、交通等领域的应用。
4)随着我国北斗系统在全球范围的建设与不断完善,北斗的相对定位将更加精确有效,应用前景也非常广泛。
[1] 杨元喜.北斗卫星导航系统的进展,贡献与挑战[J].测绘学报,2010,39(1):1-6.
[2] 高星伟,过静珺,程鹏飞,等.基于时空系统统一的北斗与GPS融合定位[J].测绘学报,2012,41(5):743-748.
[3] HOFMANN-WELLENHOF B,LICHTENEGGER H,WASLE E.GNSS-Global Navigation Satellite Systems:GPS,GLONASS,Galileo&more[M].Berlin:Springer,2007.
[4] 魏子卿,葛茂荣.GPS相对定位的数学模型[M].北京:测绘出版社,1998.
[5] 刘基余.GPS卫星导航定位理论与方法[M].北京:科学出版社,2003
[6] 王惠南.GPS导航原理与应用[M].北京:科学出版社,2003.
[7] 周忠谟,易杰军.GPS卫星测量原理与应用[M].北京:测绘出版社,1992.
[8] 蔡艳辉,程鹏飞,李夕银.用卡尔曼滤波进行 GPS动态定位[J].测绘通报,2006(7):6-8.
[9] 陈品馨,章传银,黄昆学.用相位减伪距法和电离层残差法探测和修复周跳[J].大地测量与地球动力学,2010,30(2):120-124.
[10] 李为乔,程鹏飞,蔡艳辉,等.GPS载波相位观测值中周跳探测与修复的研究[J].测绘工程,2010,19 (6):31-34.
[11] 严悦.电离层残差法探测与修复周跳特性分析[J].地理空间信息,2010(4):118-120.
[12] 葛茂荣.GPS卫星精密定轨理论及软件研究[D].武汉:武汉测绘科技大学,1995.
[13] 陈磊,杜宝玉,王圻伊,等.工程GPS控制网精度分析[J].黑龙江交通科技,2010(3):17-18.
[14] 聂建亮,杨元喜,吴富梅.一种基于改进粒子滤波的动态精密单点定位算法[J].测绘学报,2010,39(4):338-343.
Performing Centimeter-level Relative Positioning Using BeiDou Navigation Satellite System
BAI Zhengdong,YUAN Rong,GUO Jingjun,WANG Yuan
P228.4
B
0494-0911(2014)07-0011-03
2013-04-11
白征东(1968—),男,湖南华容人,博士,副教授,研究方向为GNSS卫星导航定位。
白征东,元荣,过静珺,等.北斗二代卫星厘米级相对定位[J].测绘通报,2014(7):11-13.
10.13474/j.cnki.11-2246.2014.0214
