单执行器六足步行车辆建模及平稳性控制
2014-06-27喻思维杨志刚陈尧刘群
喻思维,杨志刚,陈尧,刘群
(重庆交通大学机电与汽车工程学院,重庆 400074)
单执行器六足步行车辆建模及平稳性控制
喻思维,杨志刚,陈尧,刘群
(重庆交通大学机电与汽车工程学院,重庆 400074)
六足步行装置为获得较好的平稳性,需要多个执行器驱动腿机构,且腿机构需要多个自由度。针对一种只用一个执行器驱动6条腿的六足步行车辆,对步行车辆的车身平稳性进行数学建模,并设计了一种简单、实时的控制方案。该建模方法简单、易于控制,具有提前预判功能。
步行车辆;平稳性;控制
基于仿生技术的离散式移动方式在不平路面和松软路面上较轮式和履带式移动方式具有较大的优越性,主要应用于机器人[1-3]。六足步行机器人具有跨越障碍物、壕沟的能力,与轮式和履带移动机器人相比,能避免外部环境的破坏作用[1]。当六足步行车辆在凹凸地、沙地、雪地等特殊路面上移动时,由于腿机构运动特性或路面不平整等原因,会导致车辆在行走过程中发生倾斜和重心上下浮动,进而影响到车辆在移动过程中的平稳性。因此,需要对六足步行车辆在移动过程中的车身平稳性进行建模和控制,使车辆在移动过程中不发生车身倾斜和重心上下浮动。
本文对以著名的Hoecken机构[2]作为腿机构的单执行器6足步行车辆的平稳性进行数学建模,设计了一种简单、实时的控制方案。
1 单执行器六足步行车辆建模
单执行器六足步行汽车(如图1所示)采用1个执行器驱动6条腿使车辆移动。所采用的Hoecken机构具有理想的运动轨迹,即直线边向下的D形封闭曲线[2],且沿直线速度基本恒定[3]。在移动过程中车身的重心上下浮动很小,基本保持在同一水平面上。因此,导致车身倾斜和车身重心上下浮动的原因主要是凹凸不平的路面和松软路面。采用三角步态,且支撑腿支撑时间与腿运动周期的比值β=0.5。在静止站立或行走过程中的任一时刻(两组腿工况相互交替的时刻除外),1,3,5腿和2,4,6腿这两组腿中只有一组腿着地起支撑作用。6条腿分布情况如图2所示。
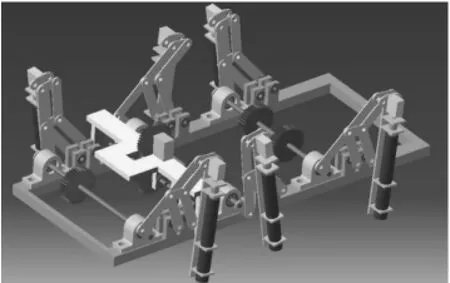
图1 单执行器六足步行车辆
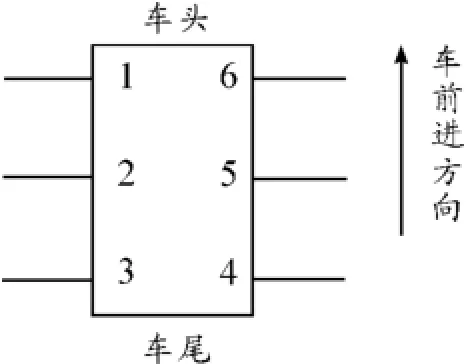
图2 腿分布情况
6条腿安装在同一水平面上,且各杆件的长度相等。凹凸不平路面和松软路面使车身倾斜,因此车身的姿态与着地的3条腿端部和未发生倾斜时的车身平面的距离有关,即需要建立车身姿态与着地的3条腿端部和未发生倾斜时的车身平面的距离之间的关系。
由于车身的倾斜姿态体现为车身绕着地的3条腿组成的三角形的3条边转动,因此通过车身的倾斜角度来获取着地的3条腿端部与未发生倾斜时的车身平面的距离是比较复杂的,且该方法是在车身已发生倾斜后通过相应的控制方案控制车身,使其尽可能快地恢复水平稳定位置而不发生倾斜。这又使控制具有了一定的延迟,影响了实时性。经过分析可知:导致车身倾斜的直接原因是着地的3条腿端部和未发生倾斜时的车身平面的距离不相等。因此,可在未着地的3条腿即将着地以支撑行走时(此时车身是水平的),提前探知即将着地的3条腿的腿端部离地面的垂直距离,根据这3个距离分析车身是否会发生倾斜,从而通过相应的方案控制相应的机构来调节这3个距离并使其相等,为3条腿着地进入支撑行走状态且保持车身水平做好准备。此种方法是直接探测需要控制的量,使建模更加直接、简单,控制更为有效、精确和方便,同时使控制具有更好的实时性。
腿机构如图3所示。其中L为曲柄杆件AB的长度。由于6条腿的各个参数和安装方式均相同,即6条腿安装在同一车身平面上,且腿的竖直杆件EI长度相等。在杆件EI上距离I点p处安装测距传感器,如图3所示。传感器应尽量贴着EI杆件且始终保持竖直状态,尽可能保证传感器在同一测量基准面里。两组腿测量的数据可以直接互用,测量的是腿端部I点与着地点的竖直距离。当每一组3条腿的测距传感器测得的数据相等时表明车身为水平,测得的数据不相等时表明此3条腿着地时会导致车身倾斜。由于6条腿上的伸缩机构安装位置是一样的,所以仅对其中一条腿进行模型分析。在图3中:杆件I点可以通过伸缩机构上下伸缩;u为I点向E点收缩后I点与传感器的最近距离;w为伸缩机构向地面伸长的距离;r为伸缩机构的运动行程;p为测距传感器到腿端部I点的距离,u≤p≤u+r;x为测距传感器测得的传感器离地面的竖直距离;y为腿端部I点与地面的竖直距离,y=x-p。腿未着地时,x>p;
若腿处在软路面上,则x<p。
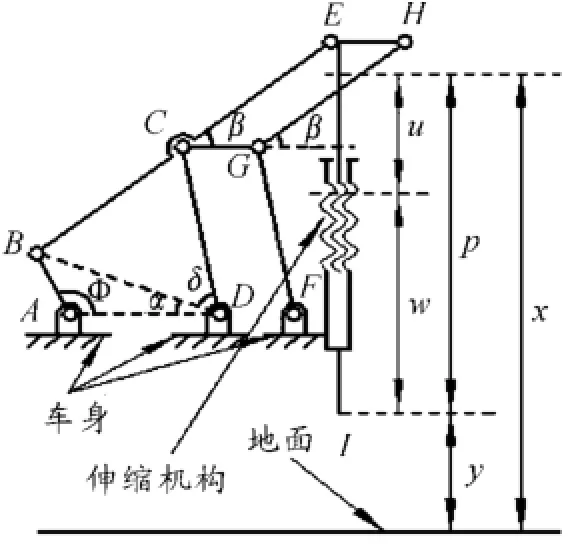
图3 腿机构和位置关系
最开始着地的情况有2种:一是1,3,5腿最开始着地;二是2,4,6腿着地。由于这两组腿是完全对称的,所以不论哪组腿最先着地,其运动分析是一样的,只是在两组腿之间相互对换相应的过程。因此,以1,3,5腿最先着地为例进行研究。
pi,j表示i腿在第j次两组腿工况相互交替时测距传感器与该腿端部I点的距离。其中i表示腿的编号;j表示两组腿第j次交替;xi,j表示i腿在第j次两组腿工况相互交替时该腿的测距传感器与地面的竖直距离。由分析可得:2,4,6腿在第1次两组腿交替工况时由悬空进入着地状态,此时2,4,6腿的p值由最初的安装位置决定且已知,记为p2,0,p4,0和p6,0。1,3,5腿离地之前各自的测距传感器与地面的竖直距离是已知的,分别记为x1,0,x3,0,x5,0。
yi,j表示i腿在第j次两组腿工况相互交替时该腿端部的I点与地面的竖直距离,即

式(1)中:pi,j表示i腿在第j次两组腿工况相互交替时测距传感器与该腿端部的I点的距离。

式(2)中:wi,j为第j次交替时悬空腿i的伸缩机构朝地已伸长的距离。

式(3)中:zi,k表示i腿的伸缩机构第k次执行伸缩工作所伸长或缩短的距离,且当伸缩机构朝地面伸长时为正值,伸缩机构往上收缩时为负值。
zi,k由测速传感器测出的伸缩机构螺杆转过的圈数与螺杆转过一圈时螺管移动的距离相乘得到。腿是否着地由测力传感器来判断。
当某条腿在低洼路面着地时,低洼点会导致车身倾斜,且车身发生倾斜时测距传感器始终保持竖直状态,即伸缩机构需要伸缩的长度由车身倾斜的角度值和x值共同决定。由于在软路面上车身发生的倾斜是有一定时间过程而非瞬时完成,即车身一发生倾斜就会马上被探测到,而这个倾斜角度很小,可以近似等于x值。因此判断车身是否发生倾斜的参数为测距传感器与地面的竖直距离x。以着地的3条腿的x值之间的关系来判断和控制车身的倾斜。若着地的3条腿的x值不相等,则表明车身发生倾斜,此时可通过3值之间的关系,用相应的控制方法控制伸缩机构以尽可能快的速度使车身恢复水平状态。
同理可得2,4,6腿最先着地时的车身姿态模型。
2 工况分析与控制方案

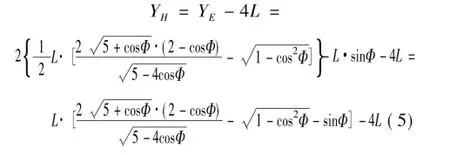
以1,3,5腿即将进入着地起支撑行走状态为例。由于是提前探测,所以1,3,5腿的曲柄杆件AB转过的角度Φ(角度传感器测出)处于[0°,90°],且保证当杆件AB从Φ转到90°时,腿已经完成了相应的自适应动作,做好着地准备。由腿机构运动分析可得腿机构的E点与I点的运动轨迹相同,且Φ为90°,180°或270°时,I点处于倒“D”形曲线的直线部分最下端,此时YI=4L。因此腿抬起的高度YH为
1)两组腿即将进入交替工况(即未着地工况)时,由前面的分析可得
实际需要控制的量Ri,j为

在Φ角度时,1,3,5腿需要控制的量分别为R1,j,R3,j,R5,j。
3条腿的伸缩机构能伸长的距离(r-wi,j)均大于其Ri,j值。此时,所有腿的伸缩机构均采用伸长动作。3条腿的伸缩机构的伸缩速度之间的关系由Ri,j值决定。为了保证车身处于水平状态且腿能同时做好准备,再加上伸缩机构的参数均相同,所以采用比例的方法,即以Ri,j最小值为基准,其他2个Ri,j值分别与其相比得出一个比例系数,该系数就是相应的腿的伸缩机构伸长速度与Ri,j最小值的速度比例系数。
当3条腿的伸缩机构能伸长的距离(r-wi,j)中存在小于其Ri,j值时,先判断哪条腿(r-wi,j)小于其Ri,j的值最大,算出其差值[Ri,j-(r-wi,j)],并以此腿作为基准,其他腿的Ri,j分别减去差值[Ri,j-(r-wi,j)],然后再采用比例法控制其相应的速度。
2)两组腿经过交替工况且已着地工况
地面为硬路面时,已着地的腿的测距传感器测得值xi,j=Ri,j=u+wi,j,且yi,j=xi,j-pi,j= xi,j-xi,j-1。
地面为轻度软路面时,由于在轻度软路面上3条腿各自下陷的距离不一样,导致车身发生倾斜,腿上的测距传感器测得的xi,j不相等。此时根据前面的工况进行判断,决定执行所有腿均伸长的动作或是一些腿执行伸长另一些腿执行缩短动作。
3 结束语
对采用三角步态行走方式的足端部具有自适应机构的六足步行汽车的自适应平稳性进行数学建模和理论分析,对其工况进行讨论,并针对相应的工况设计了一种简单且具有同时性的控制方案,保证了该步行汽车顺利行驶。
[1]胡洪志,马宏绪.一种双足步行机器人的步态规划方法[J].机器人技术与应用,2002(3):16-18.
[2]胡昶.基于形状记忆合金的四足步行机器人[J].机器人技术与应用,2002(1):29-31.
[3]雷静桃,高峰,崔莹.多足步行机器人的研究现状及展望[J].机械设计,2006(9):1-3,44.
[4]Garcia E,Jimenez M A.The evolution of robotics research[J].Robotics And Automation,2007,3(10):90 -102.
[5]Anirban G,AM ARNATH C.Adjustable Mechanism for Walking Robots with Minimum Number of Actuator[J]. CHINESE JOURNAL OF MECHANICAL ENGINEERING,2011,24(5):769-766.
[6]孔蓉.单执行器步行机器人机构运动分析[J].企业技术开发,2012(9):9-11.
(责任编辑 刘舸)
Modeling and Stability Control Research of Single Actuator of
Six-legged Walking Vehicle
YU Si-wei,YANG Zhi-gang,CHEN Yao,LIU Qun
(School of Mechanical and Automotive Engineering,Chongqing Jiaotong University,Chongqing 400074,China)
In order to obtain better stability,six-legged walking device needs leg mechanism with multiple actuators driving leg mechanism and legs with multiple degrees of freedom.The paper introduces a kind of six-legged walking car with only one actuator drive six legs.Mathematical modeling stability of the walking vehicle body is built and a simple and real time control scheme is designed. The modeling method is simple and easy to control and control has the anticipation in advance function.
walking vehicle;stationarity;control
U461
A
1674-8425(2014)06-0038-04
10.3969/j.issn.1674-8425(z).2014.06.007
2013-06-24
喻思维(1988—),男,四川人,硕士研究生,主要从事车辆电子研究。
喻思维,杨志刚,陈尧,等.单执行器六足步行车辆建模及平稳性控制[J].重庆理工大学学报:自然科学版,2014(6):38-41.
format:YU Si-wei,YANG Zhi-gang,CHEN Yao,et al.Modeling and Stability Control Research of Single Actuator of Six-legged Walking Vehicle[J].Journal of Chongqing University of Technology:Natural Science,2014 (6):38-41.
