车辆侧翻倾向动态测试的研究(一)
2014-06-27
车辆侧翻倾向动态测试的研究(一)
为了定量分析车辆的侧翻倾向,必需开发一变工况下预测车辆侧翻可靠的动态测试方法。本文介绍车辆侧翻稳定性方面已经开发的动态测试的一些成果。开发车辆侧翻倾向的测试,必需首先确定车辆侧翻所绕的轴线(侧翻轴)的位置。为此应首先进行中心轴概念的研究。如本文所述表明,车辆中心轴位置是不可预测的,导致三种可能的侧翻轴的分析,要进行车辆系统的动能和势能,和其部件变形造成的结果以及过去开发的能量基础函数所谓侧翻防止能量储备(RPER)的研究。RPER的定义为车辆到达侧翻位置所需的能量和车辆回转运动能量可转换成举升车辆的重势的差值。根据这种定义,在车辆侧翻情况下,在到达侧翻位置前,RPER函数值应降至零,通常在非侧翻情况RPER常为正值。本文介绍了开发的计算RPER的算式。RPER函数已经被Missouri-Columbia大学,采用全尺寸6辆轻型货车,箱式载货车和轻型箱式越野车辆以及二辆轿车,在不同的控制和侧翻掉纵过程的扩展试验获得的试验结果证实。试验时还采用的路边几何状况,包括路面铺土到铺石子的过渡段。本文对两侧翻和非侧翻情况绘出RPER的性能曲线。
[Abstraet]A reliable dynamic measure to predict vehicle rollover under various conditions must be developed in order to quantitatively analyze the rollover propensities of vehicles.Several efforts have been made and are introduced in this paper on the development of such a dynamic measure of vehicle rollover stability.The position of the axis about which a vehicle rolls over(rollover axis)must be determined prior to developing a vehicle rollover propensity measure.For this reason,an investigation into the central axis concept was first performed.However,as shown in the paper,the unpredictability of the central axis position of the vehicle leads to the analyses of three other possible rollover axes.Investigations into the kinetic and potential energies of the vehicle system and its components have resulted in the modification and the extension of a previously developed energy based function called Rollover Prevention Energy Reserve(RPER).The RPER function is defined as the difference between the energy needed to bring the vehicle to its tip-over position and the vehicle rotational kinetic energy which can be transferred into gravitational potential thergy to lift the vehicle.According to this definition,the value of the RPER function drops below zero before a vehicle reaches its tip-over position in a rollover case,but always remains positive in a non-rollover case.The algorithm developed to calculate RPER is presented in the paper.The RPER function has been validated using experimental results obtained from full-scale vehicle testing performed by the University of Missouri-Columbia.Six light trucks,vans,and utility vehicles,as well as two passenger cars,were extensively tesied in a variety of handling and rollover maneuvers.Different roadside geometries,including transitions from pavement onto soil and into a curb,were used.The validation plots present the RPER functions for both rollover and non-rollover cases.
侧翻倾向 侧翻防止能量储备 动态测试 侧翻稳定性
(上接第2期)
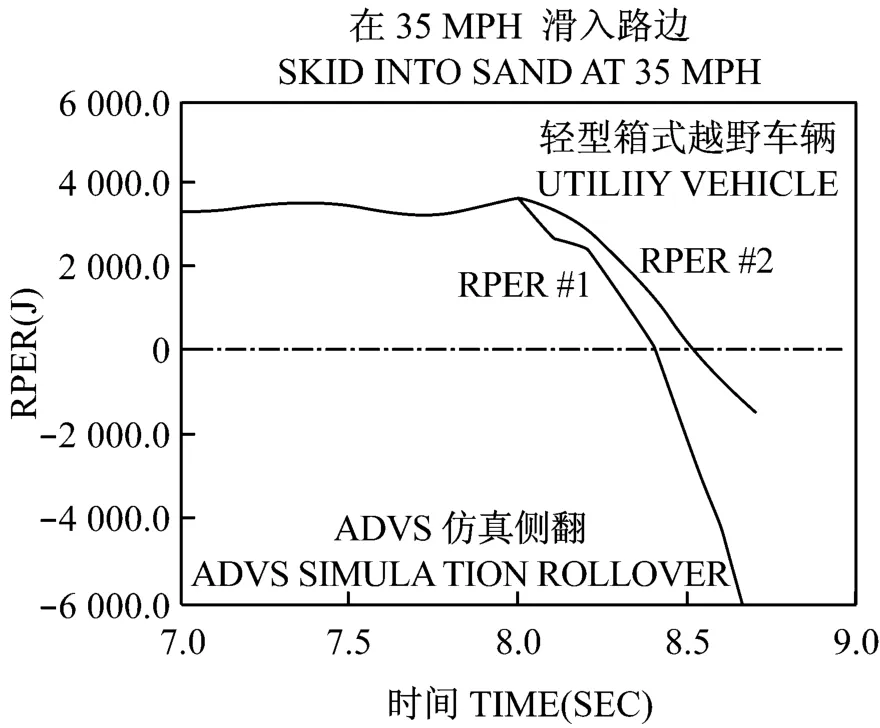
图16 石子倾斜路面侧翻仿真结果Fig.16 Curb-tripped rollover simulation results
侧边和路边碰撞产生的结果示于图19,这些侧边路边碰撞是4.5 m/s,5.0 m/s和5.5 m/s下进行的,仅在5.5 m/s情况下车辆发生侧翻,三RPER2函数和弹性质量倾倒角同时发生,仅5.5 m/s RPER2成为负值。
和路边30°倾斜碰撞的结果如图20所示。这些仿真是在初始速度为5.0,5.5和6.0 m/s进行的。仅在6.0 m/s车辆发生侧翻。因此,对此初始速度在6.0 m/s以下的,RPER2函数值均保持为正。
所述结果表明,RPER2函数可始终如一地精确地确定车辆侧翻,而RPER2同时还能预测车辆侧翻的发生。对于侧边和倾斜沙地碰撞的侧翻最小速度分别是7.0和8.0 m/s。对于侧边和倾斜路边碰撞的侧翻取小速度分别为5.5和6.0 m/s。当车辆弹簧质量倾倒角达50°时,应考虑侧翻发生。
对于侧边沙地碰撞RPER2函数在接近0.45秒倾倒角为28°成为负值,然而该倾倒角直到0.7秒仍未达到50°。倾斜沙地碰撞RPER2函数在接近0.9秒弹簧质量倾倒角为38°时成为负值,在这样情况直到1.30秒,倾倒角达不到50°。
路边碰撞RPER2函数几乎直到0.45秒倾倒角达28°仍保持为正值,直到0.7秒,弹簧质量倾倒不到50°。倾斜路边碰撞RPER2函数在接近0.40秒和倾倒角30°成为负值。然而弹簧质量要求0.8秒达倾倒角50°。
概括和结论
发现中心轴概念,对分析弹簧质量运动,在倾斜的车辆侧翻方面不能提供一合适的轴,而导致三可能侧翻轴的研究。采用该三轴估算用于动态侧翻测量中势能和动能项目间能量的改变。基于这方面分析,第一侧翻轴平行于车辆的X轴,确定其仅对用于侧翻预测函数是合适的。
两动态测量可以估算和预测车辆侧翻,侧翻防止能量储备RPER1和RPER2已采用实验和仿真结果进行开发和验证。在RPER2数值方面,实验数据和仿真结果之间,该验证产生少许差异。这些验证进一步表明两RPER函数适于在轻度和适度碰撞工况下工作,但在最严重的碰撞工况下,RPER2比RPER1更可靠,因为RPER2在预测车辆侧翻方面更加稳定。因此,RPER2被推荐为广泛应用的侧翻预测函数。
采用上述结论研究4组仿真方案RPER2函数的性能,在各组方案中,进行个别仿真时,仅初始速度有少量增大。从小的倾倒角到完全侧翻,伴随着合适的RPER2特性,倾倒角逐渐增大。EPER2函数对非侧翻开始并保持为正值,而RPER2函数对侧翻过程变成并保持为负值。
尽管本研究仅采用倾斜侧翻驾驶方案,但该RPER概念已成功用操纵诱导侧翻以及[18-19]补充和证实,在其中采用RPER函数在灵敏度分析中作为实物侧翻测量,目的在于确定不同的车辆和对车辆侧翻响应环境参数的影响。用RPER函数在灵敏度分析已证实比采用倾倒角或倾倒率作为侧翻测量更加优越。
除它理论上用于预测侧翻和确定其严重性外,该RPER概念可完成现行事故防止或在车辆摆脱驾驶员的控制或接近侧翻作为乘客的保持装置。而且为有助于工程师们和保护乘客的另一种可能,今后建议它明确列入高速公路车辆系统法规(IHVS)中。(谷雨译自SAE paper No.930831)
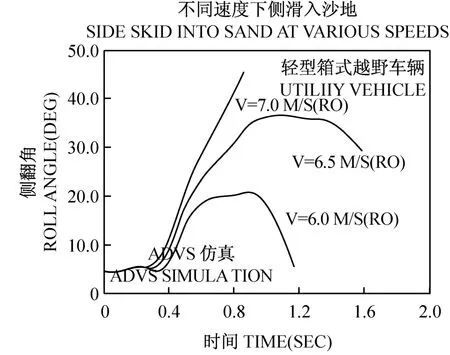
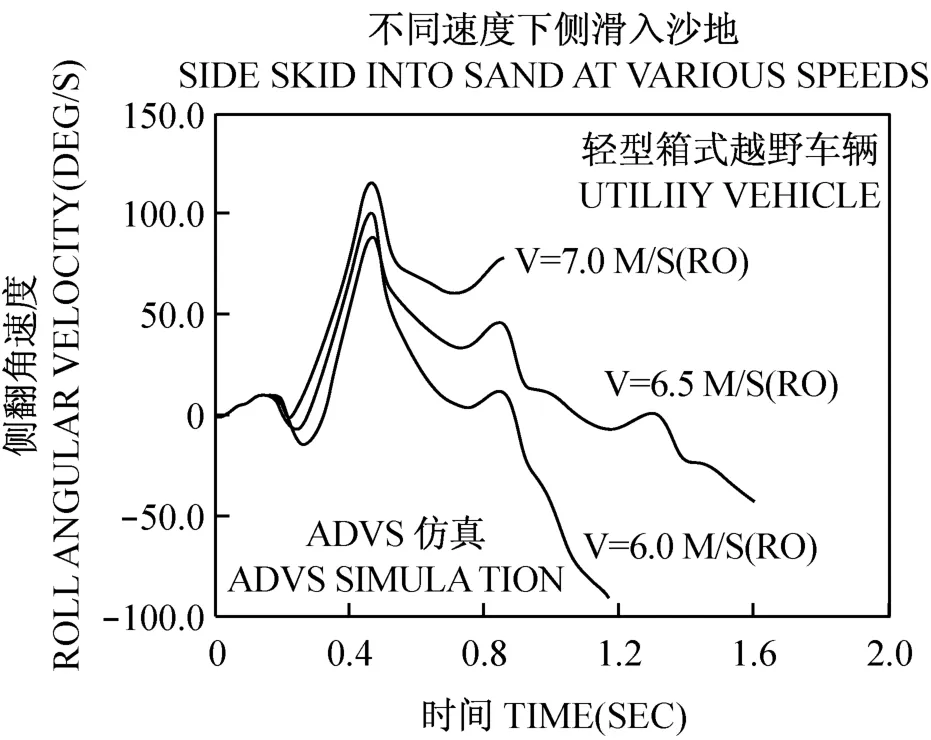
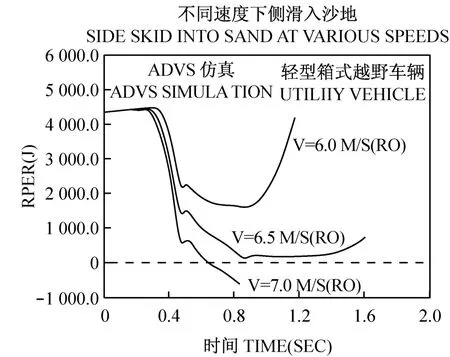
图17 侧滑移入沙地Fig.17 Side skid into sand

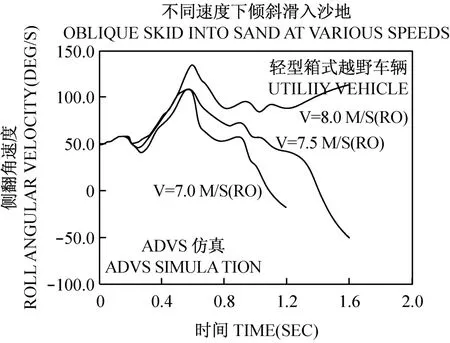
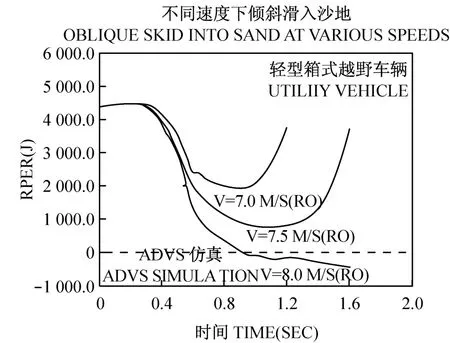
图18 倾斜滑入沙地Fig.18 Oblique skid into sand

图19 侧滑入路边Fig.19 Side skid into a curb
感谢
感谢美国交通部国家交通安全局(NHTSA)的支持,本文中部分研究描述属No.DTNH22-89-C-07005有关评价,调查结果和建议允许包含本著作中,作者可不必表明出至NHTSA。
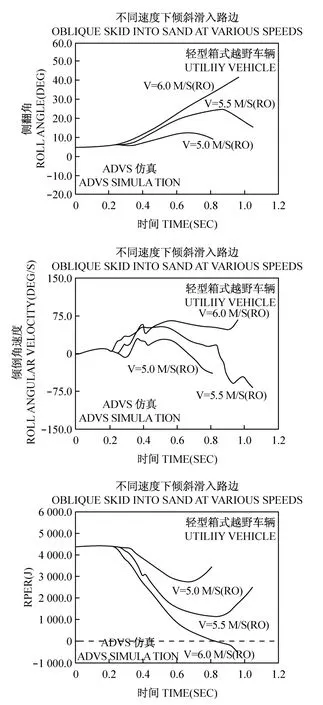
图20 倾斜滑入路边Fig.20 Oblique skid into a curb
符号
Nomenelature
回转轴最接近车辆弹簧质量中心的点
A
Point on rottional axis closest to vehicle sprung mass center
车辆车轮支持区周线和通过A点侧翻轴垂直平面交点
B
Intersection point of vehicle wheel support area perimeter and the plane perpendicular to the rollover axis passing through point A
车辆弹簧质量中心
C
Vehicle sprung mass center
重力加速度矢量
G
ravitational acceleration vector
车辆弹簧质量质心惯性矩阵
IC
Vehicle sprung mass centroidal inertia matrix
惯性参考系统
IRS
Inertial Reference System
ms
车辆弹簧质量
Vehicle srun mass pg
车辆总质量
mt
Vehicle total mass
N
沿侧翻轴法向矢量
Normal vector along rollover axis
非惯性的参考系统
NIRS
Non-Inertial Reference System
弹簧质量沿NIRSX轴回转半速
p
Rotational quasi-velocity of sprung mass along x-axis of NIRS
弹簧质量沿NIRS Y轴回转半速
q
Rotational quasi-velocity of sprung mass along y-axis of NIRS
RAC
在IRS内从点到C点矢量
Vector from point A to point C in IRS
RBC
在IRS内从B点到C点矢量
Vector from point B to point C in IRS
弹簧质量沿NIRS Z轴回转半速
r
Rotational quasi-velocity of sprung mass along z-axis of NIRS
在NIRS内A点到C点矢量
rAC
Vector from point A to point C in NIRS
在NIRS内B点到C点矢量
rBC
Vector from point B to point C in NIRS
侧翻防止能量储备
RPER
Rollover Prevention Energy Reserve
回转动能
TK
Rotational kinetic energy
转换矩阵
T
Transformation matrix
弹簧质量沿NIRS X轴的平移速度
u
Translational velocity of sprung mass along x-axis of NIRS
弹簧质量中心在IRS内总平移速度
VC
Total translational velocity of sprung mass center in IRS

弹簧质量中心沿IRS的X轴速度分量
VXComponent of sprung mass center velocity along X-
axis of IRS

弹簧质量中心沿IRS的Y轴速度分量
VY
Component of sprung mass center velocity along Y-axis of IRS
车辆重力势能
Vcru
Gravitational potential energy of vehicle
弹簧质量沿NIRS的Y轴的平移速度
v
Translational velocity of sprung mass along y-axis of NIRS
车辆弹簧质量中心的速度垂直于NIRS内侧翻轴
vr
Velocity of vehicle sprung mass center perpendicular to vehicle rollover axis in NIRS
车辆弹簧质量中心在NIRS内总速度
vs
Total velocity of vehicle sprung mass cen'er in NIRS
车辆弹簧质量中心沿车辆NIRS内侧翻轴的速度
vt
Velocity of vehicle sprung mass center along vehicle rollover axis in NIRS
弹簧质量沿NIRS的Z轴的平移速度
w
Translational velocity of sprung mass along z-axis of NIRS
沿IRS的X轴任意点的座标
X
Coordinate of arbitrary point along X-axis of IRS
XAC
沿NIRS的X轴任意点的座标
x
Coordinate of arbitrary point along x-axis of NIRS
沿IRS Y轴任意点的座标
Y
Coordinate of arbitrary point along Y-axis of IRS
(下接2014.No.4)
An Investigation Into Dynamie Measures of Vehiele Rollover Propensity
Amdrze G.Nalecz Zhengyu Lu Kemneth L.d'Entremont
SJTU Mechanical&Power Engineering Institute
Rollover propensity Rollover provention energy reserve(RPER) Dynamic measures Rollover stability
U467.1+9
A
1006-8244(2014)03-44-05