一种船用碟式斯特林太阳能热发电装置的设计与实现
2014-06-27,,
,,
(武汉理工大学 能源与动力工程学院,武汉 430063)
太阳能作为一种清洁可持续使用能源,与常规能源相比较,它可以无限使用,不会枯竭,而且安全无害,只要加以收集、转换即可直接使用,因而在开发利用过程中具有显著的优势。在分析了当前船用太阳能发电现状的基础上,以碟式斯特林太阳能热发电技术和双轴混合控制太阳能跟踪技术为核心,研究并设计了一种船用碟式斯特林太阳能热发电装置。该装置可实现在船舶这一特殊的运动载体和水中航行这一特定环境下,通过自动跟踪太阳的碟式聚光镜将太阳光聚焦于斯特林发动机头部,加热高压氢气膨胀推动活塞做功,通过曲柄连杆机构带动发电机转化成电能输出,作为辅助能源应用在船舶的照明系统、驾驶系统、空调系统、辅助机械等方面,从而实现节能减排、保护环境的良好效果[1]。
1 碟式太阳能热发电技术
近年来,太阳能光伏发电系统已经获得了大量的研究且在陆上得到了广泛应用,但在船舶上的应用目前主要集中于小型船舶上,在全动力船舶和大型远洋船舶上推广不多。其主要原因就是光伏发电因受材料的限制,发电量不高,效率低,其发电成本相对较高,系统成本回收期较长,在船舶领域的发展受到了很大程度的限制。太阳能热发电较光伏发电更能适应大规模的工业化应用。目前,太阳能热力发电单机容量已发展到兆瓦级,全球已有数十座兆瓦级太阳能热电站投入试验运行[2]。按集热器类型的不同太阳能热发电系统可分为槽式、塔式和碟式三种系统。碟式系统具有高效、模块化和具备组成混合发电系统的能力等特点,既可以作分布式系统单独供电,也可以并网发电。在所有太阳能发电技术中,碟式太阳能热发电系统具有最高的光热转换效率(约85%)和光电转换效率(约31%),因此有潜力成为最便宜的可再生能源之一。碟式斯特林太阳能热发电装置原理图见图1。

图1 碟式斯特林太阳能热发电装置系统原理
表1是几种太阳能发电形式的技术性能对比。从中可见,碟式太阳能热发电具有光电转换效率高、发电规模灵活、耗水量少等优点。又由于该系统对场地的平坦性要求低,因此应用范围广泛。以上的这些优点,为碟式斯特林太阳能热发电技在船舶上的应用提供了可能。
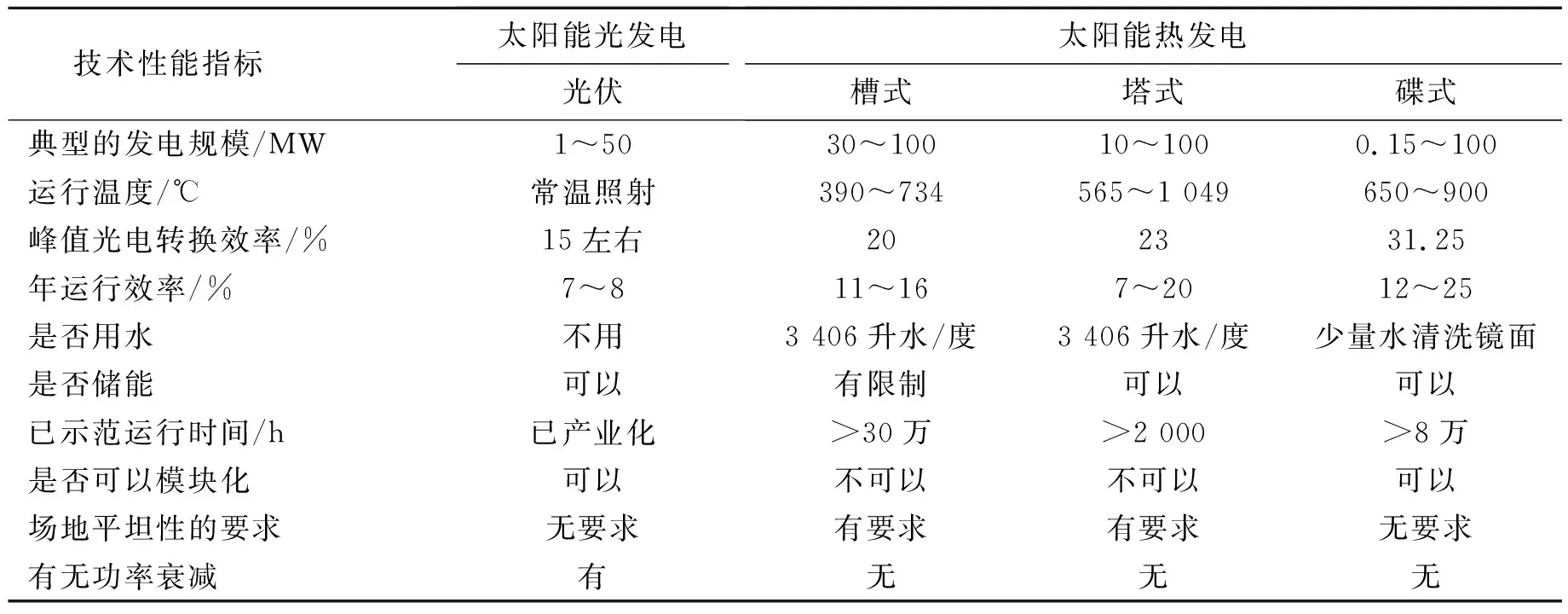
表1 太阳能发电形式的一些工程技术性能对比[3]
2 发电装置系统硬件设计
本文研究并设计了一种船用碟式斯特林太阳能热发电装置,其硬件系统构成主要包括:碟式聚光器、聚光器支架、斯特林发动机支架、太阳能斯特林机、由斯特林机驱动的发电机、太阳双轴跟踪装置、以及自动跟踪控制系统,见图2。

图2 船用碟式斯特林太阳能热发电装置结构
其中,碟式聚光反射器呈扇形分割,由6个扇形聚光反射镜片组拼接成一旋转抛物面结构;反射镜支架固定于船舶甲板上,用于支撑并安装所述碟式聚光反射镜;斯特林发动机支架一端固定连接所述碟式聚光反射镜支架,另一端固定连接太阳能斯特林机上;太阳能斯特林机的接收器位于碟式聚光反射镜的焦点处;发电机固定连接所述太阳能斯特林机上,构成斯特林发电机模块;太阳双轴跟踪装置安装于所述反射镜支架上,包括两台直流电机、两台减速器、一个丝杠螺母副和一个带轮传动机构;自动跟踪控制系统通过信号线连接所述太阳双轴跟踪装置,控制所述碟式聚光反射镜的运行。整个装置主要用螺栓连接,便于拆装和运输。装置的转动、定位和连接等机械结构都简单可靠,跟踪运动用单片机实现控制,这样不仅加工容易且增加了系统的可靠性。
3 跟踪控制系统设计
要将碟式斯特林太阳能热发电技术应用在船舶上,首先需要解决的问题就是自动跟踪太阳的碟式聚光器跟踪控制系统的设计,由于“斯特林”热机及其吸热器等部分是不动的,把移动的太阳能稳定地汇集聚焦到置于移动船舶上的太阳接收器上,要有一套自动跟踪装置,这种跟踪装置应该是以太阳为目的物的主动寻找的双通道闭环跟踪装置。基于此,本文提出了一种采用高度角-方位角双轴混合跟踪式(视日运动轨迹跟踪和光电跟踪相结合)船用碟式太阳跟踪聚光器跟踪控制系统,该碟式聚光器可实现在船舶航行过程中对太阳运行位置变化的准确预测,进而通过调节碟式聚光器的转角提高该船用太阳能热发电系统的综合转化效率。
3.1 跟踪控制系统硬件
1)微控制器采用STM32 F3。STM32 F3微控制器整合了带有DSP与FPU指令、工作频率为72 MHz的32位ARM Cortex-M4内核和高级模拟外设,从而提高了灵活性。该控制器通过整合Cortex-M4内核、快速12位5 MSPS和精密16位sigma-delta ADC、可编程增益放大器(4档增益、精确度为1%)、快速50 ns比较器和工作频率为144 MHz的多功能时钟控制单元实现了嵌入式DSC设计创新,从而实现了最佳控制效果。其优化的系统架构使其能有效控制并处理电路板内的混合信号,如三相电机控制、生物识别和工业传感器输出或音频滤波器等。
2)GPS接收器。采用HOLUX(长天科技股份有限公司)生产的环天BU-353S4 SIRF 4芯片,支持NMEA0183通信协议支持NMEA0183通讯协议,内建超大电容, 可储存快速取得的卫星讯号数据。接收器带48个追踪频道,灵敏度为-163 dBm,定位精度为2.5 m,并支持WAAS(wide area augmentation System)。STM32 F3单片机解码出船舶航行过程中的实时经纬度以及UTC(coordinated universal time)时间,根据相关天文公式计算出当前太阳高度角和方位角。
在时刻t,太阳的高度角h和方位角α分别为
h(t)= arc sin-1[sin(δt)sin(φt)+
cos(δt)cos(φt)cos(ωt)]
(1)


(2)
式中:φ——当前船舶所在的地理纬度;
δ——太阳赤纬角;
ω——太阳时角[4]。
其中赤纬角可由Cooper的近似计算公式求得
(3)
式中:n——1年中的第几天。
一天当中随时间变化引起的太阳位置的变化可由太阳时角ω表示,太阳在正午时太阳时角为0°,每小时变化15°,上午为正,下午为负。因此有
ω=(12-T)·15°
(4)
式中:T——船舶所在地时间。
3)机械控制机构。主要由水平方向调整电机、俯仰方向调整电机、丝杠螺母副、减速器、带轮传动机构组成。当STM32 F3单片机根据GPS接收模块得到船舶当前所在位置的经纬度和UTC时间,根据公式(1)、(2)计算出当前的太阳高度角增量和方位角增量,输出一定数量的PWM(pulse width modulation)信号,驱动电机在水平和俯仰两个方向上进行调整,实现对太阳的初步跟踪。
4)电子罗盘。采用美国KVH公司生产的C100电子(数字)罗盘,其具有体积小、价格低、性能稳定可靠等特点。它采用磁通门技术,航向精度可达到0.5°以内,分辨率为0.1°,通过其数字接口,可提供地球磁场X、Y轴的水平分量,其本身采用铝壳封装,工作温度-40°~+65°,内置的自动校准软件,可对磁场变化而引起的误差进行修正[5]。
电子罗盘根据其原理识别出船舶航行方向与北方向的夹角并通过接口输出角度值,当船舶航向改变时,由单片机STM32 F3采集电子罗盘输出的角度值变化量,进行各种判断、处理;同时单片机发出指令给方位角调整电机,驱动碟式太阳跟踪聚光器回转到船舶航向改变前的朝向。
5)反馈调整模块。利用光电二极管的输出,判断碟式聚光器的轴线是否正对太阳,通过碟式聚光器轴线与理想位置的偏差调整驱动装置的运动状态。从而调整聚光器的位置,使聚光器主光轴指向太阳。如图3所示,装置采用4个光电二极管作为传感器来检测光强的变化,跟踪太阳的位置,进行误差校正。
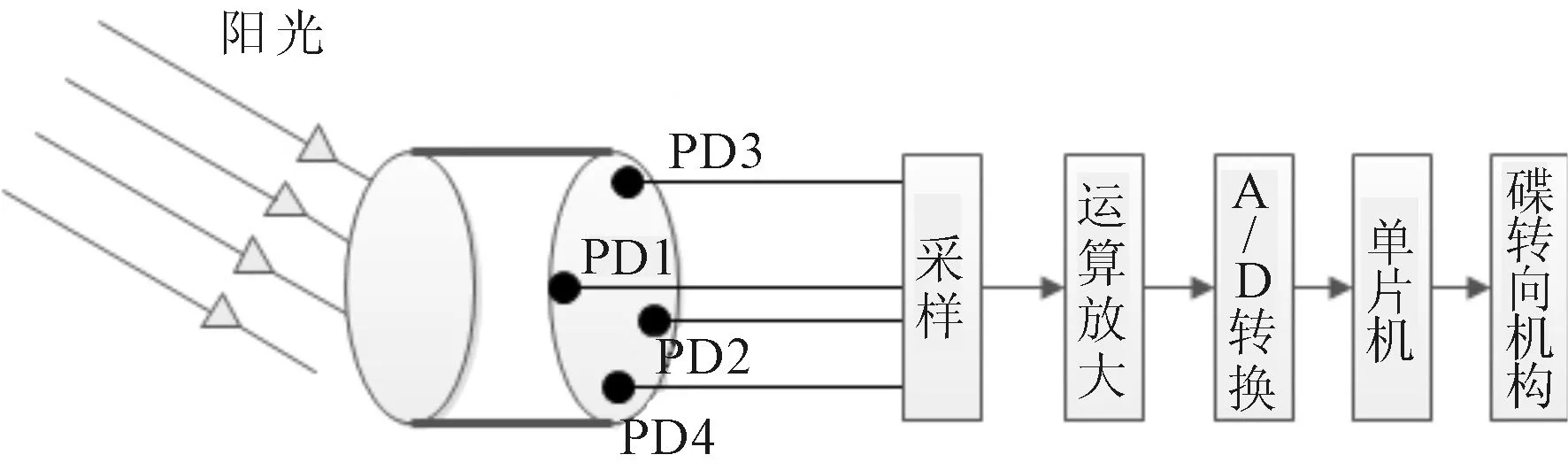
图3 光电二极管跟踪太阳原理
4个完全相同的光电二极管封装于一个高壁圆筒传感器盒内,均匀分布在东南西北4个方位处,并沿靠近筒壁布置,圆筒有一定高度遮挡斜射的太阳光。传感器盒固定在聚光器边缘面上,用来监测太阳光。其中PD1和PD2这2个光电二极管用于检测东西方向光线变化,调整太阳碟式聚光器东西方向角,即方位角;PD3和PD4这2个光电二极管则用于调整太阳碟式聚光器南北方向角,即高度角。检测电路见图4 示。
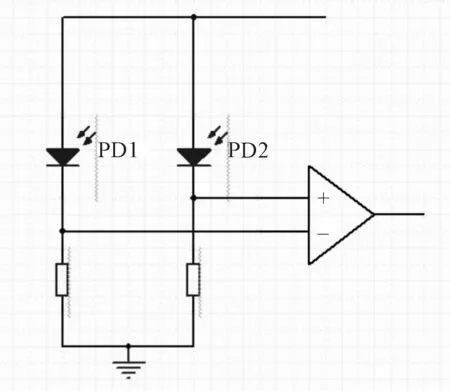
图4 检测电路
当太阳光垂直照射到聚光器表面时,PD1和PD2接受的太阳辐射强度相同,经比较器后输出信号为零;当太阳光偏离聚光器主光轴时,PD1和PD2接受的太阳辐射强度不同,经比较器后输出偏差信号,完成信号采样过程。偏差信号通过运放及相应保护电路,经模数转换成数字信号,根据偏差信号的正负和大小决定电机的转向和转动角度,直到小于精度允许范围,电机停止动作。特别地,当东西方位或南北方位的两个光电传感器感受到的光强差值偏差数字信号绝对值小于某个设定阀值时,单片机不发出让电机动作的信号;当光强差值偏差数字信号绝对值超过设定阀值时,单片机才发出信号控制电机转动,这样控制的目的是提高系统的经济性。
6)天气模块。主要用于海面天气状态的检测,如光强、风速和阴雨等。当海面风速达到或大于设定值时,STM32 F3单片机发出指令,通过接口电路驱动转向机构转向使碟式聚光器受风面积最小,从而保证系统的安全,海面风速信息通常可以从驾驶台获取。当系统采集的实时环境光强小于设定的最小经济发电光强时,船用碟式斯特林太阳能热发电装置做出相应处理,等待光强达到设定阀值时再次运行。
3.2 跟踪控制原理
跟踪系统采用高度角-方位角双轴混合跟踪的控制方式,通过GPS接收器,实时获得船舶所在地的经纬度以及UTC时间;通过开环的程序跟踪,计算出太阳高度角和方位角,确定太阳当前的位置;输出PWM信号,驱动转向机构的水平与俯仰电机,使碟式聚光器达到预期位置,完成视日运动轨迹跟踪,实现对太阳的初步跟踪;当船舶航向改变时,电子罗盘通过接口输出角度变化量,由单片机采集电子罗盘输出的角度值,进行各种判断、处理,同时发出指令给回转系统,驱动碟式聚光器回转到船舶航向改变前的朝向;采用光电二极管对碟式聚光器做自动定位和误差校正,进行闭环控制,实现光电跟踪。通过微调聚光器的位置,确保太阳光通过碟式聚光器聚焦都落在斯特林发动机的接收器上,以保证发电装置光电转换效率的最大化。跟踪系统组成原理框图见图5。
以STM32 F3为主控制器,实现混合控制的主程序是一个无限循环程序,它能实现运行后根据太阳角度调整船用碟式斯特林太阳能发电装置碟式太阳跟踪聚光器的方位,根据反馈信号进行微调,产生PWM信号驱动电机转动,实现太阳跟踪。当监测到有中断产生时,主程序停止运行,中断程序设计包括天气危害检测处理、船舶航向改变处理和超出跟踪时间区间处理等,中断程序完成后再回到主程序。主程序流程见图6。
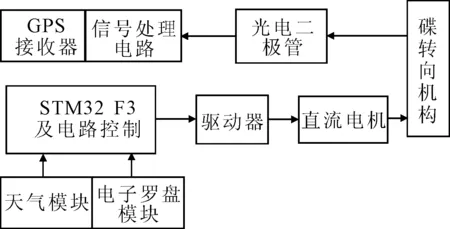
图5 跟踪系统组成原理
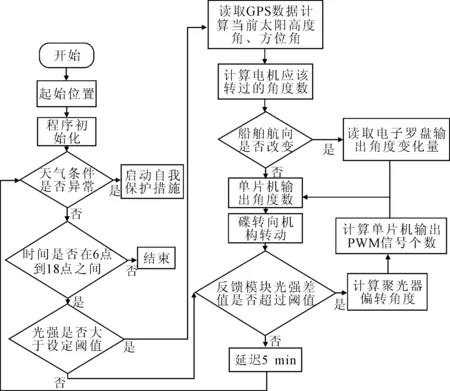
图6 主程序流程图设计
4 结论
在实际船舶航行试验中,采用直径为1.5 m的碟式聚光反射镜作为聚光器,聚光跟踪控制系统能准确将太阳光斑汇集聚焦到斯特林发电机的接收器上,随着太阳角度变化及船舶航向的变化,该光斑能够一直保持在斯特林发电机的接收器上。光斑的偏离误差保持在1 cm以内,系统的跟踪精度控制在1°以内,满足了船用碟式斯特林太阳能热发电系统的发电要求,实现了船舶在航行过程中对太阳的全自动跟踪,显著提高了船用碟式斯特林太阳能热发电装置对太阳能的利用效率,聚光器接收到的太阳辐射总量较固定式平均提高了约30%,初步达到了预期目的。
为了使碟式斯特林太阳能热发电技术更好地应用于船舶上,今后应当在提高太阳跟踪控制系统的稳定性和降低斯特林发电机成本两个方面还应该更加深入地开展实验研究工作。
[1] 魏 乔.船用光伏发电系统最大功率跟踪及自动跟踪控制研究[D].武汉:武汉理工大学,2012.
[2] 廖 葵,龙新峰.基于小型发电机的碟式太阳能热发电技术研究进展[J].能源技术,2007,28(5):275-278.
[3] 李 铁.碟式聚光太阳能热发电系统用斯特林发动机的研制[D].北京:中国科学院研究生院,2011.
[4] 范伟成,宗 情,彭小方,等.碟式斯特林太阳自动跟踪控制系统设计[J].单片机与嵌入式系统应用,2012,12(10):70-73.
[5] 林明春,夏桂锁,林玉池,等.电子罗盘在全自动智能陀螺寻北仪中的应用[J].光学精密工程,2007,15(5):719-724.